基于PSO-GA方法的并聯六自由度平臺位姿控制方法
本發明涉及并聯六自由度平臺控制,特別是涉及一種基于pso-ga方法的并聯六自由度平臺位姿控制方法。
背景技術:
1、并聯六自由度平臺是近年來在世界范圍內蓬勃發展的一種新型制造機構,其中包括一個或多個并聯機構。與串聯機構相比,并聯機構具有剛性好、精度高、速度和加速度高等特殊優勢,在船舶、航空航天、汽車、醫療等領域具有更廣闊的應用前景。
2、與串聯機器人相比,并聯機構由于剛度大、結構穩定緊湊、累積誤差小、精度高、動力性能好等優點,非常適用于一些需要高負載,高動態響應,高控制精度的工作場景。研究并聯六自由度平臺的運動學和動力學特性,有助于建立精確的數學模型,這對優化平臺的設計和提高運動精度至關重要。深入理解平臺的運動學與動力學特性,可以幫助開發更高效的運動控制算法,提高平臺的控制精度和穩定性。
3、因此亟需提供一種新型的基于pso-ga方法的并聯六自由度平臺位姿控制方法來解決上述問題。
技術實現思路
1、本發明所要解決的技術問題是提供一種基于pso-ga方法的并聯六自由度平臺位姿控制方法,能夠快速求解平臺位置,并實現對并聯平臺的快速穩定控制。
2、為解決上述技術問題,本發明采用的一個技術方案是:提供一種基于pso-ga方法的并聯六自由度平臺位姿控制方法,包括以下步驟:
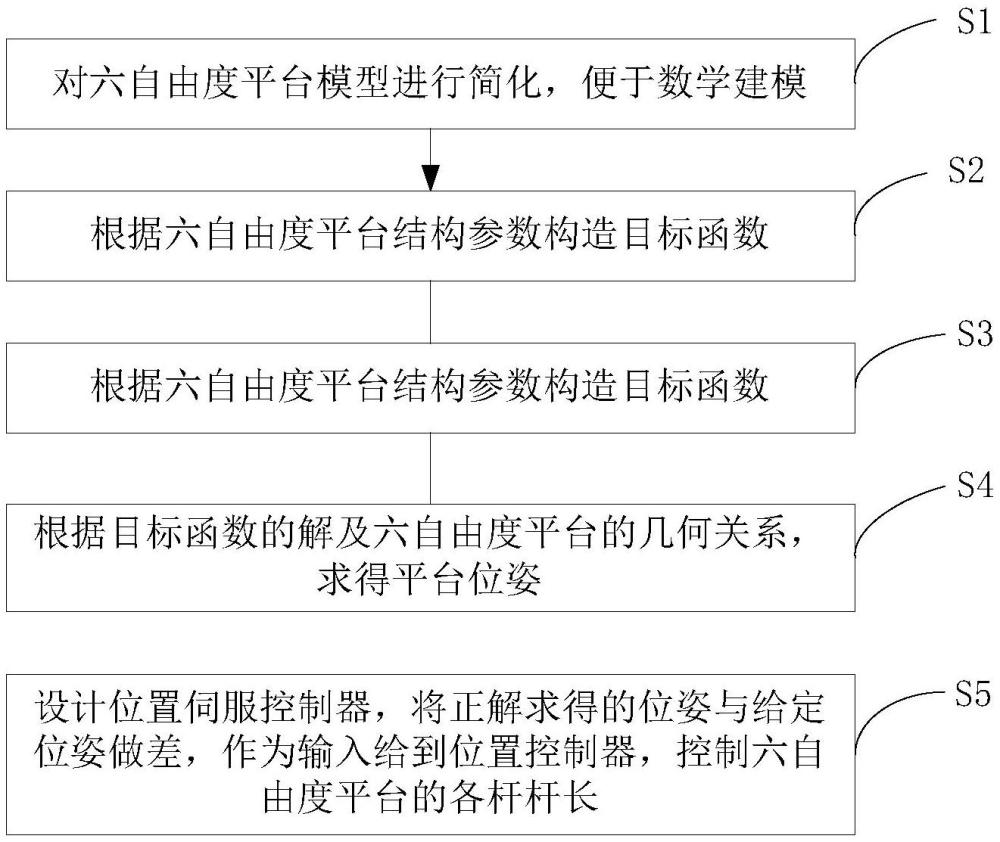
3、s1:對六自由度平臺模型進行簡化,便于數學建模;
4、s2:根據六自由度平臺結構參數構造目標函數;
5、s3:利用pso-ga方法求解目標函數;
6、s4:根據目標函數的解及六自由度平臺的幾何關系,求得平臺位姿;
7、s5:設計位置伺服控制器,將正解求得的位姿與給定位姿做差,作為輸入給到位置控制器,控制六自由度平臺的各桿桿長。
8、在本發明一個較佳實施例中,步驟s1的具體步驟包括:
9、所述六自由度平臺模型包括動平臺、定平臺、六個電缸、電機,電機安裝在電缸一側,電缸的一端通過球鉸與動平臺活動連接,電缸的另一端通過虎克鉸與定平臺活動連接;
10、將與動平臺連接的鉸鏈旋轉中心視為在動平臺上,與靜平臺連接的鉸鏈旋轉中心視為在靜平臺上,電缸視為質點在中心的細長桿,將六邊形的上平臺三條長邊延長至兩兩相交,則六邊形被簡化為等邊三角形。
11、在本發明一個較佳實施例中,在步驟s2中,所述六自由度平臺結構參數包括上平臺半徑ra,下平臺外接圓rb,上下平臺鉸鏈中心點所在平面的距離h,以及上平臺短邊所對的圓弧角a0和下平臺短邊所對的圓弧角b0,簡化后的三角形三頂點坐標表示原來動平臺六頂點的坐標,根據動平臺頂點坐標和靜平臺頂點坐標與桿長的關系構造位姿方程,并添加三個幾何約束方程使得目標函數得到唯一解。
12、在本發明一個較佳實施例中,步驟s3的具體步驟包括:
13、s301:初始化pso和ga參數,初始化粒子位置和速度,初始化個體最佳位置和全局最佳位置;
14、s302:動態調整慣性權重,進入pso迭代部分并更新速度,更新位置,計算當前值,更新個體最佳位置,最后更新全局最佳位置;
15、s303:判斷目標函數f的值是否進入局部最優,進入則用ga算法重新初始化部分粒子并將原粒子剔除;若未進入則判斷是否滿足終止條件,若滿足終止條件則進入步驟s305,若不滿足則返回至步驟s301;
16、s304:遺傳算法部分,依次進行選擇操作、交叉操作、變異操作,生成新的粒子,替換進入局部最優部分的粒子;
17、s305:輸出全局最優解,繪制目標函數值隨迭代次數變化的圖像。
18、進一步的,在步驟s302中,粒子速度更新方法:
19、
20、其中,α是一個平衡因子,介于0到1之間;w(t)是時間t的慣性權重,自適應變化;f(pi(t))對應粒子i在其歷史上找到的最優位置pi(t)所對應的目標函數f的值;f(g(t))對應所有粒子中當前找到的全局最優位置g(t)所對應的目標函數f的值;vi(t)是粒子i在時間t的速度;qi(t)是粒子i在時間t的位置,表示粒子i對方程組的一組可能解;
21、qi(t)=[x1i(t)?x2i(t)?x3i(t)y1i(t)?y2i(t)?y3i(t)z1i(t)?z2i(t)?z3i(t)]
22、pbesti是個體最佳位置;gbest是全局最佳位置;c1和c2是學習因子;r1,r2和r3是介于0和1之間的隨機數;c3是局部搜索的加速常數;l(t)是局部最佳位置。
23、位置更新公式如下:
24、qi(t+1)=qi(t)+vi(t+1)
25、進一步的,在步驟s303中,局部最優為當目標函數值每次迭代改變量小于某一閾值,但目標函數值并未達到理想值,認為目標函數值進入局部最優。
26、在本發明一個較佳實施例中,步驟s4的具體步驟包括:
27、平臺中心坐標為模型簡化后所得三角形的三頂點坐標的平均值,即:
28、
29、平臺繞平臺中心建立的平臺坐標系z軸、y軸、x軸旋轉角度γ、β、α為旋轉后三角形頂點q′i與中心點p′0的連線與平臺零位時三角形頂點qi與中心點p0連線在平臺零位時動平臺xy,xz,yz平面上的投影所形成的夾角,即:
30、
31、在本發明一個較佳實施例中,在步驟s5中,所述位置伺服控制器采用pid控制,將通過pid調節后的參數輸入給運動學逆解算法,逆解得到六個桿的桿長,作為控制變量控制各桿桿長。
32、本發明的有益效果是:本發明提出一種能夠快速求解平臺位置并實現穩定控制的運動學算法,以實現對并聯平臺的快速穩定控制;具體效果為:
33、(1)pso算法中引入了自適應慣性權重和局部搜索機制,結合了全局搜索和局部搜索的優勢;
34、(2)使用ga算法,增強搜索的全局性;
35、(3)設計的控制器無需傳感器采集數據作為反饋,而是用正解算法替代,提高精度的同時降低了成本;
36、(4)所用結構參數是一般平臺均具有的,因此算法具有通用性。
技術特征:
1.一種基于pso-ga方法的并聯六自由度平臺位姿控制方法,其特征在于,包括以下步驟:
2.根據權利要求1所述的基于pso-ga方法的并聯六自由度平臺位姿控制方法,其特征在于,步驟s1的具體步驟包括:
3.根據權利要求1所述的基于pso-ga方法的并聯六自由度平臺位姿控制方法,其特征在于,在步驟s2中,所述六自由度平臺結構參數包括上平臺半徑ra,下平臺外接圓rb,上下平臺鉸鏈中心點所在平面的距離h,以及上平臺短邊所對的圓弧角a0和下平臺短邊所對的圓弧角b0,簡化后的三角形三頂點坐標表示原來動平臺六頂點的坐標,根據動平臺頂點坐標和靜平臺頂點坐標與桿長的關系構造位姿方程,并添加三個幾何約束方程使得目標函數得到唯一解。
4.根據權利要求1所述的基于pso-ga方法的并聯六自由度平臺位姿控制方法,其特征在于,步驟s3的具體步驟包括:
5.根據權利要求4所述的基于pso-ga方法的并聯六自由度平臺位姿控制方法,其特征在于,在步驟s302中,粒子速度更新方法:
6.根據權利要求4所述的基于pso-ga方法的并聯六自由度平臺位姿控制方法,其特征在于,在步驟s303中,局部最優為當目標函數值每次迭代改變量小于某一閾值,但目標函數值并未達到理想值,認為目標函數值進入局部最優。
7.根據權利要求1所述的基于pso-ga方法的并聯六自由度平臺位姿控制方法,其特征在于,步驟s4的具體步驟包括:
8.根據權利要求1所述的基于pso-ga方法的并聯六自由度平臺位姿控制方法,其特征在于,在步驟s5中,所述位置伺服控制器采用pid控制,將通過pid調節后的參數輸入給運動學逆解算法,逆解得到六個桿的桿長,作為控制變量控制各桿桿長。
技術總結
本發明公開了一種基于PSO?GA方法的并聯六自由度平臺位姿控制方法,包括以下步驟:S1:對六自由度平臺模型進行簡化,便于數學建模;S2:根據六自由度平臺結構參數構造目標函數;S3:利用PSO?GA方法求解目標函數;S4:根據目標函數的解及六自由度平臺的幾何關系,求得平臺位姿;S5:設計位置伺服控制器,將正解求得的位姿與給定位姿做差,作為輸入給到位置控制器,控制六自由度平臺的各桿桿長。本發明提出一種能夠快速求解平臺位置并實現穩定控制的運動學算法,以實現對并聯平臺的快速穩定控制。
技術研發人員:張濤,王超,曾億山,施永平,陳鶴銘,王雷
受保護的技術使用者:合肥工業大學
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!