一種多功能固定裝置、機器人關(guān)節(jié)執(zhí)行器及機器人的制作方法
本公開涉及機器人,尤其涉及一種多功能固定裝置、機器人關(guān)節(jié)執(zhí)行器及機器人。
背景技術(shù):
1、所有的機器人動作關(guān)節(jié)都安裝有集成化的執(zhí)行器,來完成總控單元的動作命令。關(guān)節(jié)執(zhí)行器除了提供足夠的扭矩之外,機器人對關(guān)節(jié)執(zhí)行器的動作精度擁有更高的要求。機器人關(guān)節(jié)執(zhí)行器通常采用雙編碼器方案來獲得高精度的位置信息。
2、首先,關(guān)于走線方式,傳統(tǒng)關(guān)節(jié)執(zhí)行器的雙編碼器拓撲結(jié)構(gòu)中,執(zhí)行器轉(zhuǎn)子側(cè)和執(zhí)行器定子側(cè)的編碼器信號線、電源線、信號總線等線纜均需要通過中間的滑環(huán)結(jié)構(gòu)進行連接。這種拓撲由于編碼器在執(zhí)行器轉(zhuǎn)子側(cè),所以其供電、通信線路必須由滑環(huán)提供至另一側(cè),增加了滑環(huán)的路數(shù)、尺寸,使得設(shè)計冗余。
3、其次,關(guān)于殼體固定方式,現(xiàn)有關(guān)節(jié)執(zhí)行器殼體的固定方法主要有兩種:減速器輸出側(cè)軸向固定和關(guān)節(jié)執(zhí)行器殼體徑向固定。在現(xiàn)有關(guān)節(jié)執(zhí)行器殼體固定裝置中,存在以下兩方面問題:(1)關(guān)節(jié)執(zhí)行器殼體固定裝置靈活性差,當關(guān)節(jié)執(zhí)行器軸向長度發(fā)生改變時,需對多個機械部件進行重新設(shè)計;(2)關(guān)節(jié)執(zhí)行器線纜走線方式的機械結(jié)構(gòu)復雜、可靠性差。
技術(shù)實現(xiàn)思路
1、本公開提供了一種多功能固定裝置、機器人關(guān)節(jié)執(zhí)行器及機器人。
2、根據(jù)本公開的一方面,提供了一種關(guān)節(jié)執(zhí)行器殼體的多功能固定裝置,關(guān)節(jié)執(zhí)行器包括殼體前蓋、殼體后蓋、關(guān)節(jié)執(zhí)行器輸出軸,所述殼體前蓋和所述殼體后蓋分別設(shè)置于所述關(guān)節(jié)執(zhí)行器輸出軸的兩端;所述固定裝置包括:
3、卡扣,所述卡扣的一端可拆卸地連接所述殼體前蓋,所述卡扣的另一端可拆卸地連接所述殼體后蓋;
4、所述卡扣與所述殼體前蓋、所述殼體后蓋之間設(shè)有間隙,所述間隙用于關(guān)節(jié)執(zhí)行器理線,所述卡扣用于保護所述間隙內(nèi)的線纜。
5、可選的,所述卡扣包括垂直部、第一水平部、第二水平部,所述垂直部的一端與所述第一水平部連接;所述垂直部的另一端與所述第二水平部連接。
6、可選的,所述殼體前蓋和所述殼體后蓋互相連接形成圓柱形殼體,所述垂直部設(shè)置于所述圓柱形殼體的周向,與所述圓柱形殼體之間形成垂直間隙。
7、可選的,所述第一水平部固定于所述殼體前蓋靠近所述關(guān)節(jié)執(zhí)行器輸出軸的輸出圓盤的一端,所述第一水平部與所述殼體前蓋之間形成第一水平間隙;所述第二水平部設(shè)置于所述殼體后蓋的外側(cè),所述第二水平部與所述殼體后蓋之間形成第二水平間隙。
8、可選的,所述關(guān)節(jié)執(zhí)行器還包括旋轉(zhuǎn)組件,設(shè)置于所述殼體前蓋上,并通過傳動機構(gòu)與所述關(guān)節(jié)執(zhí)行器輸出軸的輸出圓盤連接;所述旋轉(zhuǎn)組件通過所述卡扣固定于所述殼體前蓋上。
9、可選的,所述旋轉(zhuǎn)組件通過所述卡扣的所述第一水平部固定于所述殼體前蓋上,所述第一水平部開設(shè)有卡槽,用于固定所述旋轉(zhuǎn)組件。
10、可選的,所述卡扣的一端通過若干個螺釘固定于所述殼體前蓋上。
11、可選的,所述線纜包括電源線和信號線;所述卡扣內(nèi)側(cè)設(shè)置有分隔電源線和信號線的分隔部。
12、可選的,所述分隔部為設(shè)置在所述卡扣內(nèi)側(cè)的線槽,用于分別容納電源線和信號線。
13、可選的,所述分隔部為分別包覆在所述電源線外表面的第一襯層和包覆在信號線外表面的第二襯層。
14、可選的,所述分隔部為設(shè)置在所述電源線和所述信號線之間的隔離欄。
15、可選的,所述線纜包括溫度傳感器信號線、溫度傳感器電源線、電機繞組線、編碼器信號線、編碼器電源線。
16、可選的,所述關(guān)節(jié)執(zhí)行器可包括或不包括減速器。
17、根據(jù)本公開的第二方面,提供了一種機器人關(guān)節(jié)執(zhí)行器,包括上述技術(shù)方案中任意一項所述的多功能固定裝置。
18、根據(jù)本公開的第三方面,提供了一種機器人,包括至少一個上述技術(shù)方案所述的機器人關(guān)節(jié)執(zhí)行器。
19、本公開提供了一種關(guān)節(jié)執(zhí)行器殼體的多功能固定裝置,當電機軸向長度發(fā)生改變時(軸向長度增加或減少),僅需相應(yīng)增加或減少該關(guān)節(jié)執(zhí)行器殼體固定裝置的長度,即可實現(xiàn)對不同軸向長度電機的適配,無需對其他機械部件重新進行設(shè)計,進而提高關(guān)節(jié)執(zhí)行器殼體固定裝置的靈活性;此外,采用在關(guān)節(jié)執(zhí)行器殼體固定裝置外部通道走線方式,取消了內(nèi)部走線所使用的滑環(huán)和機械卡扣等部件,進而降低電機線纜走線機械結(jié)構(gòu)的復雜度,同時可簡化關(guān)節(jié)執(zhí)行器線纜走線的安裝工藝。
20、應(yīng)當理解,本部分所描述的內(nèi)容并非旨在標識本公開的實施例的關(guān)鍵或重要特征,也不用于限制本公開的范圍。本公開的其它特征將通過以下的說明書而變得容易理解。
技術(shù)特征:
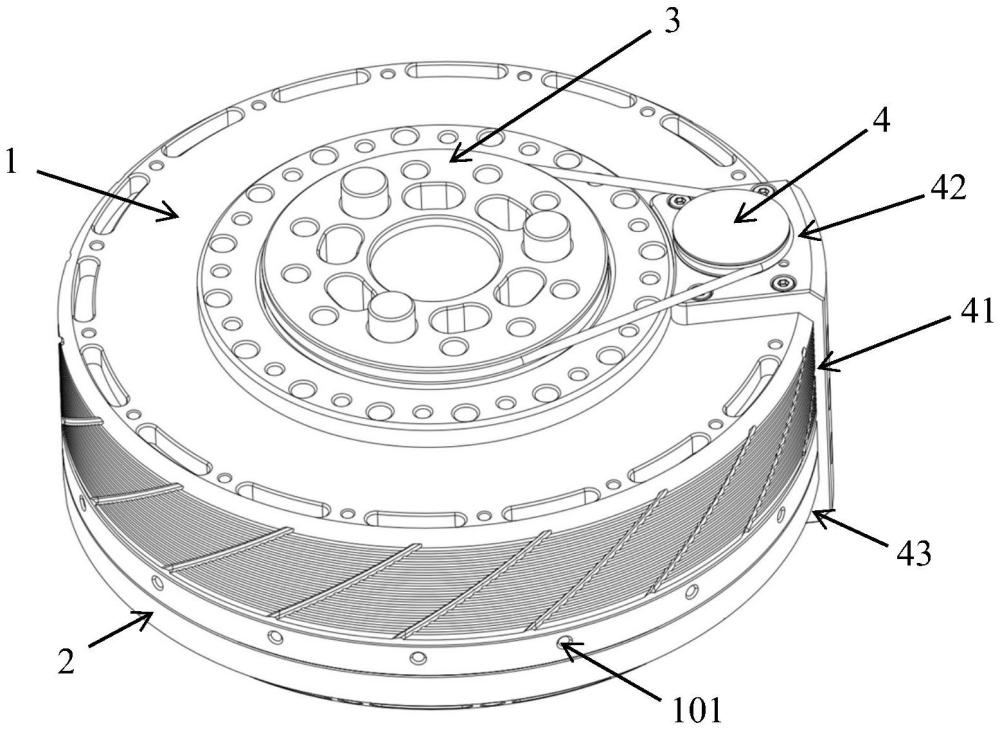
1.一種多功能固定裝置,應(yīng)用于關(guān)節(jié)執(zhí)行器,所述關(guān)節(jié)執(zhí)行器包括殼體前蓋(1)、殼體后蓋(2)、關(guān)節(jié)執(zhí)行器輸出軸(3),所述殼體前蓋(1)和所述殼體后蓋(2)分別設(shè)置于所述關(guān)節(jié)執(zhí)行器輸出軸(3)的兩端;其特征在于,所述固定裝置包括:
2.根據(jù)權(quán)利要求1所述的多功能固定裝置,其特征在于,所述卡扣包括垂直部(41)、第一水平部(42)、第二水平部(43),所述垂直部(41)的一端與所述第一水平部(42)連接;所述垂直部(41)的另一端與所述第二水平部(43)連接。
3.根據(jù)權(quán)利要求2所述的多功能固定裝置,其特征在于,所述殼體前蓋(1)和所述殼體后蓋(2)互相連接形成圓柱形殼體;其特征在于,所述垂直部(41)設(shè)置于所述圓柱形殼體的周向,與所述圓柱形殼體之間形成垂直間隙(51)。
4.根據(jù)權(quán)利要求2或3所述的多功能固定裝置,其特征在于,所述第一水平部(42)固定于所述殼體前蓋(1)靠近所述關(guān)節(jié)執(zhí)行器輸出軸(3)的輸出圓盤(31)的一端,所述第一水平部(42)與所述殼體前蓋(1)之間形成第一水平間隙(52);所述第二水平部(43)設(shè)置于所述殼體后蓋(2)的外側(cè),所述第二水平部(43)與所述殼體后蓋(2)之間形成第二水平間隙(53)。
5.根據(jù)權(quán)利要求2所述的多功能固定裝置,其特征在于,所述關(guān)節(jié)執(zhí)行器還包括旋轉(zhuǎn)組件(6),設(shè)置于所述殼體前蓋(1)上,并通過傳動機構(gòu)(7)與所述關(guān)節(jié)執(zhí)行器輸出軸(3)的輸出圓盤(31)連接;其特征在于,所述旋轉(zhuǎn)組件(6)通過所述卡扣(4)固定于所述殼體前蓋(1)上。
6.根據(jù)權(quán)利要求5所述的多功能固定裝置,其特征在于,所述旋轉(zhuǎn)組件(6)通過所述卡扣(4)的所述第一水平部(42)固定于所述殼體前蓋(1)上,所述第一水平部(42)開設(shè)有卡槽,用于固定所述旋轉(zhuǎn)組件(6)。
7.根據(jù)權(quán)利要求1所述的多功能固定裝置,其特征在于,所述卡扣(4)的一端通過若干個螺釘固定于所述殼體前蓋(1)上。
8.根據(jù)權(quán)利要求1所述的多功能固定裝置,其特征在于,所述線纜(9)包括電源線(91)和信號線(92);其特征在于,所述卡扣(4)內(nèi)側(cè)設(shè)置有分隔電源線(91)和信號線(92)的分隔部。
9.根據(jù)權(quán)利要求8所述的多功能固定裝置,其特征在于,所述分隔部為設(shè)置在所述卡扣(4)內(nèi)側(cè)的線槽(10),用于分別容納所述電源線(91)和所述信號線(92)。
10.根據(jù)權(quán)利要求8所述的多功能固定裝置,其特征在于,所述分隔部為分別包覆在所述電源線外表面的第一襯層(11)和包覆在信號線外表面的第二襯層(12)。
11.根據(jù)權(quán)利要求8所述的多功能固定裝置,其特征在于,所述分隔部為設(shè)置在所述電源線(91)和所述信號線(92)之間的隔離欄(13)。
12.根據(jù)權(quán)利要求8-11中任意一項所述的多功能固定裝置,其特征在于,所述線纜(9)包括溫度傳感器信號線、溫度傳感器電源線、電機繞組線、編碼器信號線、編碼器電源線。
13.一種機器人關(guān)節(jié)執(zhí)行器,其特征在于,包括權(quán)利要求1-12中任意一項所述的多功能固定裝置。
14.一種機器人,其特征在于,包括至少一個權(quán)利要求13所述的機器人關(guān)節(jié)執(zhí)行器。
技術(shù)總結(jié)
本公開涉及機器人技術(shù)領(lǐng)域,尤其涉及一種多功能固定裝置、機器人關(guān)節(jié)執(zhí)行器及機器人。多功能固定裝置具體包括:卡扣,卡扣的一端可拆卸地連接殼體前蓋,卡扣的另一端可拆卸地連接殼體后蓋;卡扣與殼體前蓋、殼體后蓋之間設(shè)有間隙,間隙用于關(guān)節(jié)執(zhí)行器理線,卡扣用于保護間隙內(nèi)的線纜。采用在關(guān)節(jié)執(zhí)行器殼體固定裝置外部通道走線方式,取消了內(nèi)部走線所使用的滑環(huán)和機械卡扣等部件,進而降低電機線纜走線機械結(jié)構(gòu)的復雜度,同時可簡化關(guān)節(jié)執(zhí)行器線纜走線的安裝工藝;同時,由于卡扣是可拆卸的連接方式,可以作為線纜檢修窗口,在線纜出現(xiàn)故障時,可以將卡扣拆卸,方便檢修和維護卡扣內(nèi)的線纜。
技術(shù)研發(fā)人員:韓立華,曾王利
受保護的技術(shù)使用者:伽南科技(北京)有限公司
技術(shù)研發(fā)日:20240214
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!