機械臂人機交互方法及系統
本發明涉及機械臂人機交互,具體而言,涉及一種機械臂人機交互方法及系統。
背景技術:
1、隨著制造業的轉型升級與機器人技術的創新發展,機械臂的工作環境與工作任務越來越復雜化與多樣化,許多復雜任務只靠機械臂無法有效完成,需要人的參與完成任務。人機協作(human-robot?collaboration,hrc)是一種人機械臂共同完成任務的工作模式,其中機械臂和人類協作伙伴共享工作空間,密切配合,機器人能夠承擔重復性、高負載或高精度的工作,人類則負責創造性、判斷力或決策力要求高的任務。兩者優勢互補,提高整體生產率,通過協調實現共同的目標。
2、人機協作將機械臂高精度與人類創造性這兩方面優點相結合,高效地完成復雜作業任務。在人機協作過程中,人與機械臂需要物理接觸以完成交互任務,為保證機械臂能夠高精度的完成任務,系統實時性、穩定性以及安全性尤為重要,高實時性系統能夠提高機械臂作業的精度,高穩定性能夠提高機械臂系統的作業時長。同時機械臂無需復雜的編程,可通過手動引導進行示教,在高度動態的工作環境中與人類實時配合,適應多變的任務需求。
3、機械臂人機交互系統對機械臂任務執行精度、穩定性和安全性提出了越來越高的要求,現有人機交互方案無法滿足機械臂執行復雜和多樣化任務的需求。
技術實現思路
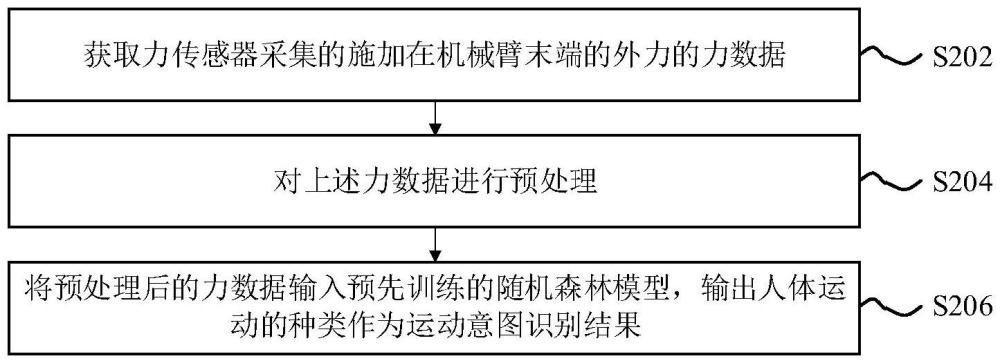
1、為解決上述問題,本發明實施例提供了一種機械臂人機交互方法,包括:獲取力傳感器采集的施加在機械臂末端的外力的力數據;對所述力數據進行預處理,所述預處理包括:進行時域特征提取、對時域特征進行直線擬合;將預處理后的所述力數據輸入預先訓練的隨機森林模型,輸出人體運動的種類作為運動意圖識別結果;所述隨機森林模型以多種類人體運動對應的力數據作為輸入、人體運動的種類作為輸出訓練得到,所述人體運動的種類包括以下至少多項:伸展、屈曲、旋轉。
2、本發明實施例提供的機械臂人機交互方法,采用隨機森林法構建基于力傳感器的人體上肢主觀運動意圖識別算法,識別多種人體上肢運動行為,具有一定預測性,能夠提前識別人體上肢運動意圖,提高人機交互系統的實時性。
3、可選地,所述進行時域特征提取包括:對單軸的所述力數據進行時域特征提取,以及針對時域上升沿、下降沿進行檢測;若檢測到所述時域特征對應曲線在預設時長內保持上升沿或下降沿狀態,則對上升沿或下降沿進行直線擬合。
4、本發明實施例中對力數據進行時域特征提取、上升沿或下降沿直線擬合,從而避免噪聲引起的振動誤差。
5、可選地,所述預處理還包括:采用卡爾曼濾波對所述力數據進行濾波處理;或者,通過重力標定去除所述力數據包含的末端執行重力。
6、本發明實施例中對力數據進行濾波及重力標定,以提高力數據的精準度。
7、可選地,所述隨機森林模型的決策樹采用分類回歸樹算法;所述分類回歸樹算法采用最小均方差作為劃分原則;所述分類回歸樹算法采用皮爾遜相關系數衡量向量相似度。
8、本發明實施例中采用隨機森林模型進行動作意圖識別,其具體使用分類回歸樹算法,可以提高人機交互系統的實時性。
9、可選地,所述力數據包括多軸力數據,采用每軸的力數據進行所述隨機森林模型的訓練以及運動意圖識別。
10、本發明實施例中對多維力數據的各軸數據均用于模型訓練及識別,提高訓練及識別效率。
11、可選地,所述方法還包括:采用pi-sigma模糊神經網絡構建的力傳感器零點漂移補償算法,對所述力傳感器零點漂移誤差進行補償。
12、本發明實施例中對力傳感器零點漂移提供了采用pi-sigma模糊神經網絡構建補償算法,降低零點漂移對力數據影響,延長六維力傳感器單次啟動使用時長,提高人機交互系統穩定性。
13、可選地,所述pi-sigma模糊神經網絡以力傳感器隨使用時間、受力大小和溫度數據變化的零點漂移誤差為訓練集,以力傳感器的使用時間、受力大小和溫度數據作為輸入,以力傳感器零點漂移補償作為輸出。
14、本發明實施例中采用pi-sigma模糊神經網絡進行訓練,當訓練誤差達到誤差性能指標時的pi-sigma模糊神經網絡作為完整模型
15、可選地,所述pi-sigma模糊神經網絡中包括輸入層、模糊化層、模糊推理層以及輸出層;
16、模糊化層的輸出為:
17、
18、式中為隸屬度,i為第i個輸入的隸屬度函數集合,j為第i個輸入的第j個隸屬度函數,為第i個輸入的第j個隸屬度函數的中心,bj為隸屬度函數寬度;
19、構建規則的前期推理:
20、
21、式中ωk為第k個權值ω;
22、每條推理規則的輸出為則每條規則的推理結論為l為前期推理層數;
23、輸出層結果為:
24、
25、將pi-sigma模糊神經網絡前向通道構建完成后,構建反向學習算法,輸出層權值調整方式為:
26、
27、
28、權值p的學習算法為:
29、
30、式中,η為學習速率,α為動量因子。
31、本發明實施例中提供了pi-sigma模糊神經網絡的具體結構以及各結構定義的表達式,可以實現力傳感器零點漂移誤差補償。
32、本發明實施例提供一種機械臂人機交互系統,用于執行上述任一項所述的方法。
33、可選地,包括隨機森林模型,所述隨機森林模型以多種類人體運動對應的力數據作為輸入、人體運動的種類作為輸出訓練得到,所述人體運動的種類包括以下至少多項:伸展、屈曲、旋轉。
34、本發明實施例提供的機械臂人機交互系統,可以取得與上述機械臂人機交互方法相同的技術效果。
技術特征:
1.一種機械臂人機交互方法,其特征在于,包括:
2.根據權利要求1所述的方法,其特征在于,所述進行時域特征提取包括:
3.根據權利要求1所述的方法,其特征在于,所述預處理還包括:
4.根據權利要求1所述的方法,其特征在于,所述隨機森林模型的決策樹采用分類回歸樹算法;
5.根據權利要求1所述的方法,其特征在于,所述力數據包括多軸力數據,采用每軸的力數據進行所述隨機森林模型的訓練以及運動意圖識別。
6.根據權利要求1所述的方法,其特征在于,所述方法還包括:
7.根據權利要求6所述的方法,其特征在于,所述pi-sigma模糊神經網絡以力傳感器隨使用時間、受力大小和溫度數據變化的零點漂移誤差為訓練集,以力傳感器的使用時間、受力大小和溫度數據作為輸入,以力傳感器零點漂移補償作為輸出。
8.根據權利要求6所述的方法,其特征在于,所述pi-sigma模糊神經網絡中包括輸入層、模糊化層、模糊推理層以及輸出層;
9.一種機械臂人機交互系統,其特征在于,用于執行如權利要求1至8任一項所述的方法。
10.根據權利要求9所述的系統,其特征在于,包括隨機森林模型,所述隨機森林模型以多種類人體運動對應的力數據作為輸入、人體運動的種類作為輸出訓練得到,所述人體運動的種類包括以下至少多項:伸展、屈曲、旋轉。
技術總結
本發明提供了一種機械臂人機交互方法及系統,該方法包括:獲取力傳感器采集的施加在機械臂末端的外力的力數據;對力數據進行預處理,預處理包括:進行時域特征提取、對時域特征進行直線擬合;將預處理后的力數據輸入預先訓練的隨機森林模型,輸出人體運動的種類作為運動意圖識別結果;隨機森林模型以多種類人體運動對應的力數據作為輸入、人體運動的種類作為輸出訓練得到。本發明實施例提供的機械臂人機交互方法,采用隨機森林法構建基于力傳感器的人體上肢主觀運動意圖識別算法,識別多種人體上肢運動行為,具有一定預測性,能夠提前識別人體上肢運動意圖,提高人機交互系統的實時性。
技術研發人員:聶靖淇,劉相權
受保護的技術使用者:北京信息科技大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!