一種焊接機(jī)器人
本技術(shù)屬于焊接機(jī)器人領(lǐng)域,具體涉及一種焊接機(jī)器人。
背景技術(shù):
1、焊接機(jī)器人是通過(guò)在機(jī)械臂安裝焊槍實(shí)現(xiàn)焊接的自動(dòng)化,可大大提高焊接質(zhì)量和焊接效率,應(yīng)用領(lǐng)域越來(lái)越廣泛。目前廣泛應(yīng)用于工業(yè)現(xiàn)場(chǎng)的焊接機(jī)器人大多是固定式的焊接機(jī)械臂,基座不能移動(dòng)且臂長(zhǎng)有限,導(dǎo)致工作范圍有限,不能滿足建筑鋼結(jié)構(gòu)等大型工件現(xiàn)場(chǎng)焊接要求。長(zhǎng)距焊接機(jī)器人不僅需要需要能夠自主移動(dòng)和高精度多自由機(jī)械臂實(shí)現(xiàn)高精度的連續(xù)長(zhǎng)距焊接,常用方案有agv+機(jī)械臂、龍門(mén)桁架+機(jī)械臂、移動(dòng)滑軌+機(jī)械臂等。其中,龍門(mén)桁架+機(jī)械臂方案需要車(chē)間改造成本高昂,焊接最大長(zhǎng)度受限于桁架長(zhǎng)度;移動(dòng)導(dǎo)軌+機(jī)械臂方案的焊機(jī)長(zhǎng)度受限于固定導(dǎo)軌長(zhǎng)度,焊接靈活性欠佳;agv+機(jī)械臂方案對(duì)整個(gè)機(jī)器人系統(tǒng)控制精度要求較高,適用于不定長(zhǎng)度的焊接,靈活性更好。
2、固定式焊接機(jī)器人的底座通過(guò)地腳螺栓固定于地面,可避免焊接機(jī)機(jī)器人工作時(shí),因底座發(fā)生晃動(dòng)而影響焊接質(zhì)量。能夠在地面移動(dòng)的焊接機(jī)器人,比如cn202210744256.8和cn201410814251.3披露的一種移動(dòng)式焊接機(jī)器人,其機(jī)械臂安裝在能夠在地面運(yùn)行的移動(dòng)底盤(pán)(或者車(chē)體)上,機(jī)械臂攜帶焊槍進(jìn)行焊接作業(yè)時(shí),當(dāng)目標(biāo)位置的地面不平整時(shí),機(jī)械臂可能因車(chē)體不平穩(wěn)而發(fā)生晃動(dòng),從而影響焊接質(zhì)量。
技術(shù)實(shí)現(xiàn)思路
1、本實(shí)用新型旨在解決現(xiàn)有技術(shù)中存在的技術(shù)問(wèn)題,本實(shí)用新型的目的是提供一種焊接機(jī)器人。
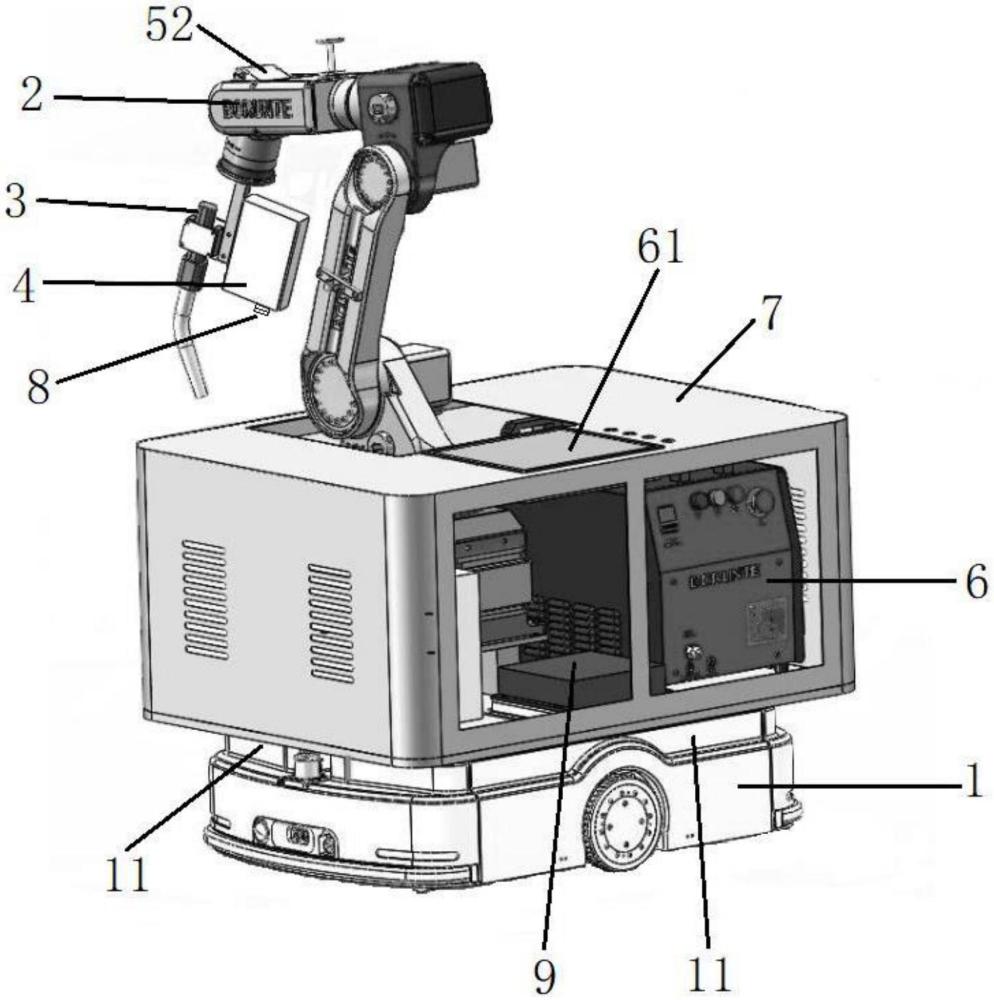
2、為達(dá)到上述目的,本實(shí)用新型采用如下技術(shù)方案:一種焊接機(jī)器人,包括能夠在地面運(yùn)行的移動(dòng)底盤(pán)、安裝在移動(dòng)底盤(pán)上的機(jī)械臂、安裝在機(jī)械臂上的用于探測(cè)焊縫的視覺(jué)系統(tǒng)、安裝在機(jī)械臂末端的焊槍、以及為焊槍提供焊絲的送絲機(jī)構(gòu),機(jī)械臂帶動(dòng)焊槍運(yùn)動(dòng)以執(zhí)行焊接作業(yè);移動(dòng)底盤(pán)的四周設(shè)有能夠伸出至移動(dòng)底盤(pán)外的連接板,連接板上可升降的連接有能夠支撐于地面的支腳。
3、上述技術(shù)方案,通過(guò)設(shè)置連接板和支腳,在焊接機(jī)器人運(yùn)行至待焊接的目標(biāo)位置后,連接板向外伸出,使支腳下降與地面接觸,增加移動(dòng)底盤(pán)的穩(wěn)固性,以防止焊接時(shí)移動(dòng)底盤(pán)發(fā)生晃動(dòng),避免機(jī)械臂的晃動(dòng)影響焊接質(zhì)量;而且當(dāng)目標(biāo)位置的地面不平整時(shí),因每個(gè)支腳可單獨(dú)升降,能夠適應(yīng)地面的不平整。
4、在本實(shí)用新型的一種優(yōu)選實(shí)施方式中,移動(dòng)底盤(pán)內(nèi)設(shè)有驅(qū)動(dòng)連接板橫向運(yùn)動(dòng)的伸縮驅(qū)動(dòng)件,通過(guò)使連接板橫向運(yùn)動(dòng),連接板能夠伸出至移動(dòng)底盤(pán)外或縮回至移動(dòng)底盤(pán)內(nèi);和/或連接板中安裝有升降驅(qū)動(dòng)件,支腳固接在升降驅(qū)動(dòng)件的下端。
5、上述技術(shù)方案,由伸縮驅(qū)動(dòng)件驅(qū)動(dòng)連接板橫向運(yùn)動(dòng),由升降驅(qū)動(dòng)件驅(qū)動(dòng)支腳豎向運(yùn)動(dòng),結(jié)構(gòu)簡(jiǎn)單,運(yùn)行可靠。
6、在本實(shí)用新型的一種優(yōu)選實(shí)施方式中,支腳設(shè)在連接板內(nèi)、并可隱藏于移動(dòng)底盤(pán)中。
7、上述技術(shù)方案,平常支腳和連接板一起隱藏于移動(dòng)底盤(pán)中,更美觀。
8、在本實(shí)用新型的一種優(yōu)選實(shí)施方式中,送絲機(jī)構(gòu)包括安裝在移動(dòng)底盤(pán)上的絲盤(pán)、以及安裝在機(jī)械臂上的與絲盤(pán)相連的用于向焊槍輸送焊絲的送絲機(jī)。
9、上述技術(shù)方案,機(jī)械臂帶動(dòng)焊槍執(zhí)行焊接作業(yè),送絲機(jī)運(yùn)行并持續(xù)向焊槍供應(yīng)焊絲。
10、在本實(shí)用新型的一種優(yōu)選實(shí)施方式中,連接板上還安裝有與支腳對(duì)應(yīng)的距離傳感器,距離傳感器的信號(hào)輸出端與控制系統(tǒng)的距離輸入端相連,控制系統(tǒng)的下降控制端與支腳的升降使能端相連,控制系統(tǒng)根據(jù)支腳距離地面的距離控制支腳下降的距離。
11、上述技術(shù)方案,通過(guò)設(shè)置距離傳感器測(cè)量對(duì)應(yīng)支腳距離地面的距離,以此確定支腳下降的距離,無(wú)需工人現(xiàn)場(chǎng)觀察地面情況手動(dòng)升降支腳,實(shí)現(xiàn)支腳的自動(dòng)升降,支撐于地面。
12、在本實(shí)用新型的另一種優(yōu)選實(shí)施方式中,機(jī)械臂上還設(shè)有對(duì)焊縫的焊接質(zhì)量進(jìn)行監(jiān)測(cè)的超聲波探傷儀,超聲波探傷儀的信號(hào)輸出端與控制系統(tǒng)相連。
13、上述技術(shù)方案,通過(guò)設(shè)置超聲波探傷儀對(duì)焊接質(zhì)量進(jìn)行實(shí)時(shí)監(jiān)測(cè),保證焊接質(zhì)量的合格性。
14、在本實(shí)用新型的另一種優(yōu)選實(shí)施方式中,移動(dòng)底盤(pán)上固接有外殼箱體,機(jī)械臂的底座固定安裝在外殼箱體中。
15、上述技術(shù)方案,通過(guò)設(shè)置外殼箱體,可將一些附件安裝在其中,更美觀。
16、在本實(shí)用新型的另一種優(yōu)選實(shí)施方式中,外殼箱體的頂部設(shè)有與控制系統(tǒng)相連的觸控顯示屏。
17、上述技術(shù)方案,通過(guò)觸控顯示屏操作和查看焊接情況,提高用戶體驗(yàn)感。
18、在本實(shí)用新型的另一種優(yōu)選實(shí)施方式中,外殼箱體中還設(shè)有配重塊。
19、上述技術(shù)方案,通過(guò)設(shè)置配重塊,在機(jī)械臂動(dòng)作時(shí),以防止移動(dòng)底盤(pán)傾倒,提高移動(dòng)底盤(pán)的穩(wěn)固性。
20、本實(shí)用新型的附加方面和優(yōu)點(diǎn)將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過(guò)本實(shí)用新型的實(shí)踐了解到。
技術(shù)特征:
1.一種焊接機(jī)器人,其特征在于,包括能夠在地面運(yùn)行的移動(dòng)底盤(pán)、安裝在移動(dòng)底盤(pán)上的機(jī)械臂、安裝在機(jī)械臂上的用于探測(cè)焊縫的視覺(jué)系統(tǒng)、安裝在機(jī)械臂末端的焊槍、以及為焊槍提供焊絲的送絲機(jī)構(gòu),所述機(jī)械臂帶動(dòng)焊槍運(yùn)動(dòng)以執(zhí)行焊接作業(yè);
2.根據(jù)權(quán)利要求1所述的一種焊接機(jī)器人,其特征在于,所述移動(dòng)底盤(pán)內(nèi)設(shè)有驅(qū)動(dòng)連接板橫向運(yùn)動(dòng)的伸縮驅(qū)動(dòng)件,通過(guò)使所述連接板橫向運(yùn)動(dòng),連接板能夠伸出至移動(dòng)底盤(pán)外或縮回至移動(dòng)底盤(pán)內(nèi);
3.根據(jù)權(quán)利要求1所述的一種焊接機(jī)器人,其特征在于,所述支腳設(shè)在連接板內(nèi)、并可隱藏于移動(dòng)底盤(pán)中。
4.根據(jù)權(quán)利要求1所述的一種焊接機(jī)器人,其特征在于,所述送絲機(jī)構(gòu)包括安裝在移動(dòng)底盤(pán)上的絲盤(pán)、以及安裝在機(jī)械臂上的與絲盤(pán)相連的用于向所述焊槍輸送焊絲的送絲機(jī)。
5.根據(jù)權(quán)利要求1-4中任一項(xiàng)所述的一種焊接機(jī)器人,其特征在于,所述連接板上還安裝有與支腳對(duì)應(yīng)的距離傳感器,所述距離傳感器的信號(hào)輸出端與控制系統(tǒng)的距離輸入端相連,控制系統(tǒng)的下降控制端與支腳的升降使能端相連,控制系統(tǒng)根據(jù)支腳距離地面的距離控制支腳下降的距離。
6.根據(jù)權(quán)利要求1-4中任一項(xiàng)所述的一種焊接機(jī)器人,其特征在于,所述機(jī)械臂上還設(shè)有對(duì)焊縫的焊接質(zhì)量進(jìn)行監(jiān)測(cè)的超聲波探傷儀,超聲波探傷儀的信號(hào)輸出端與控制系統(tǒng)相連。
7.根據(jù)權(quán)利要求1-4中任一項(xiàng)所述的一種焊接機(jī)器人,其特征在于,所述移動(dòng)底盤(pán)上固接有外殼箱體,所述機(jī)械臂的底座固定安裝在外殼箱體中。
8.根據(jù)權(quán)利要求7所述的一種焊接機(jī)器人,其特征在于,所述外殼箱體的頂部設(shè)有與控制系統(tǒng)相連的觸控顯示屏。
9.根據(jù)權(quán)利要求7所述的一種焊接機(jī)器人,其特征在于,所述外殼箱體中還設(shè)有配重塊。
技術(shù)總結(jié)
本技術(shù)提出了一種焊接機(jī)器人,包括能夠在地面運(yùn)行的移動(dòng)底盤(pán)、安裝在移動(dòng)底盤(pán)上的機(jī)械臂、安裝在機(jī)械臂上的用于探測(cè)焊縫的視覺(jué)系統(tǒng)、安裝在機(jī)械臂末端的焊槍、以及為焊槍提供焊絲的送絲機(jī)構(gòu),機(jī)械臂帶動(dòng)焊槍運(yùn)動(dòng)以執(zhí)行焊接作業(yè);移動(dòng)底盤(pán)的四周設(shè)有能夠伸出至移動(dòng)底盤(pán)外的連接板,連接板上可升降的連接有能夠支撐于地面的支腳。本技術(shù)通過(guò)設(shè)置連接板和支腳,在焊接機(jī)器人運(yùn)行至待焊接的目標(biāo)位置后,連接板向外伸出,使支腳下降與地面接觸,增加移動(dòng)底盤(pán)的穩(wěn)固性,以防止焊接時(shí)移動(dòng)底盤(pán)發(fā)生晃動(dòng),避免機(jī)械臂的晃動(dòng)影響焊接質(zhì)量;而且當(dāng)目標(biāo)位置的地面不平整時(shí),因每個(gè)支腳可單獨(dú)升降,能夠適應(yīng)地面的不平整。
技術(shù)研發(fā)人員:周頔,谷明信,羅天洪,曹川川,魯鵬,李孟,李俊緯
受保護(hù)的技術(shù)使用者:四川文理學(xué)院
技術(shù)研發(fā)日:20240627
技術(shù)公布日:2025/4/28
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!