一種探測(cè)模塊裝配順序的夾持工裝的制作方法
本技術(shù)涉及探測(cè)模塊加工設(shè)備,具體為一種探測(cè)模塊裝配順序的夾持工裝。
背景技術(shù):
1、模塊化是一種處理復(fù)雜系統(tǒng)分解為更好的可管理模塊的方式,有多種屬性,分別反映其內(nèi)部特性,模塊化用來(lái)分割,組織和打包軟件,每個(gè)模塊完成一個(gè)特定的子功能,所有的模塊按某種方法組裝起來(lái),成為一個(gè)整體,完成整個(gè)系統(tǒng)所要求的功能,現(xiàn)有的部分設(shè)備的組合使用可提高多組不同的模塊化功能結(jié)構(gòu)的配合組裝達(dá)成使用目的。
2、模塊化的設(shè)備結(jié)構(gòu)在進(jìn)行安裝使用時(shí)受其安裝需求的影響,其單個(gè)的功能模塊結(jié)構(gòu)在使用前,模塊化的結(jié)構(gòu)需要對(duì)其進(jìn)行處理加工,然而其結(jié)構(gòu)本身造價(jià)成本的高昂,為保障其模塊化結(jié)構(gòu)的安全加工使用,本申請(qǐng)?zhí)岢鲆环N新型有序的工裝加工結(jié)構(gòu)。
技術(shù)實(shí)現(xiàn)思路
1、本實(shí)用新型的目的在于提供一種探測(cè)模塊裝配順序的夾持工裝,以解決上述背景技術(shù)中提出模塊化結(jié)構(gòu)安全加工的問(wèn)題。
2、為實(shí)現(xiàn)上述目的,本實(shí)用新型提供如下技術(shù)方案,公開(kāi)了一種探測(cè)模塊裝配順序的夾持工裝,包括:驅(qū)動(dòng)座,所述驅(qū)動(dòng)座的頂部固定安裝有夾具座,所述夾具座的正面和背面均開(kāi)設(shè)有貫穿口,所述驅(qū)動(dòng)座的一側(cè)固定安裝有調(diào)控座,所述驅(qū)動(dòng)座的另一側(cè)開(kāi)設(shè)有出料口,所述調(diào)控座的底部固定安裝有步進(jìn)電機(jī),所述步進(jìn)電機(jī)的輸出端固定安裝有轉(zhuǎn)向輪,所述轉(zhuǎn)向輪的外表面固定安裝有限位套管,所述限位套管的內(nèi)壁活動(dòng)安裝有抵觸塊,所述夾具座內(nèi)壁的底部滑動(dòng)連接有工裝板,所述工裝板的頂部等距設(shè)置有多組擺放座,所述擺放座的頂部固定安裝有兩組夾持板,兩組所述夾持板的外表面卡接有密封蓋。
3、作為本實(shí)用新型的一種優(yōu)選技術(shù)方案,所述驅(qū)動(dòng)座一側(cè)的前端固定安裝有驅(qū)動(dòng)電機(jī),所述驅(qū)動(dòng)電機(jī)的輸出端固定安裝有驅(qū)動(dòng)輪,所述驅(qū)動(dòng)座的內(nèi)壁轉(zhuǎn)動(dòng)連接有多組銜接輪,所述驅(qū)動(dòng)輪和銜接輪的外表面纏繞設(shè)置有驅(qū)動(dòng)履帶,所述銜接輪的外表面固定安裝有限位齒輪,所述工裝板的底部固定安裝有限位齒板,且限位齒輪與限位齒板之間相互嚙合。
4、作為本實(shí)用新型的一種優(yōu)選技術(shù)方案,兩組所述夾持板內(nèi)壁的相向面均轉(zhuǎn)動(dòng)連接有限位轉(zhuǎn)軸,所述限位轉(zhuǎn)軸的外表面固定安裝有轉(zhuǎn)向夾板。
5、作為本實(shí)用新型的一種優(yōu)選技術(shù)方案,所述夾持板的內(nèi)壁固定安裝有多組限位彈簧,且限位彈簧的前端固定連接于轉(zhuǎn)向夾板的外表面。
6、作為本實(shí)用新型的一種優(yōu)選技術(shù)方案,所述限位套管的內(nèi)底壁固定安裝有緩沖彈簧,且緩沖彈簧的內(nèi)部設(shè)置有阻尼器,所述緩沖彈簧的頂部固定連接于抵觸塊的內(nèi)底壁。
7、作為本實(shí)用新型的一種優(yōu)選技術(shù)方案,所述驅(qū)動(dòng)座的底部固定安裝有配重座,所述配重座底部的前端和尾端均固定安裝有防滑底座。
8、作為本實(shí)用新型的一種優(yōu)選技術(shù)方案,所述抵觸塊的外表面固定安裝有導(dǎo)向滑塊,且導(dǎo)向滑塊滑動(dòng)連接于限位套管的內(nèi)壁。
9、與現(xiàn)有技術(shù)相比,本實(shí)用新型的有益效果如下:
10、1、本實(shí)用新型通過(guò)工裝板在驅(qū)動(dòng)座內(nèi)的滑動(dòng)調(diào)節(jié),配合其頂部對(duì)模塊結(jié)構(gòu)的等距夾持?jǐn)[放結(jié)構(gòu),使其擺放座上設(shè)置有保護(hù)結(jié)構(gòu),可對(duì)未進(jìn)行加工的模塊進(jìn)行包裹保護(hù),且在進(jìn)行加工時(shí),可通過(guò)抵觸塊的活動(dòng),對(duì)保護(hù)結(jié)構(gòu)進(jìn)行推動(dòng)剝離,繼而使得裝置配合模塊進(jìn)行加工前可具備獨(dú)立的保護(hù)結(jié)構(gòu),以及輔助剝離結(jié)構(gòu),繼而保障對(duì)模塊加工的安全有序性。
11、2、本實(shí)用新型通過(guò)擺放座的等距設(shè)備在,使得裝置在進(jìn)行加工工裝時(shí),且可配合夾持板上的回彈夾持結(jié)構(gòu)達(dá)到對(duì)模塊結(jié)構(gòu)的夾持固定,使得裝置具備移動(dòng)的存儲(chǔ)功能,可通過(guò)對(duì)多個(gè)模塊的預(yù)擺放,繼而配合裝置的滑動(dòng)調(diào)節(jié),使其加工結(jié)構(gòu)的依次顯露,繼而保障裝置的持續(xù)使用。
技術(shù)特征:
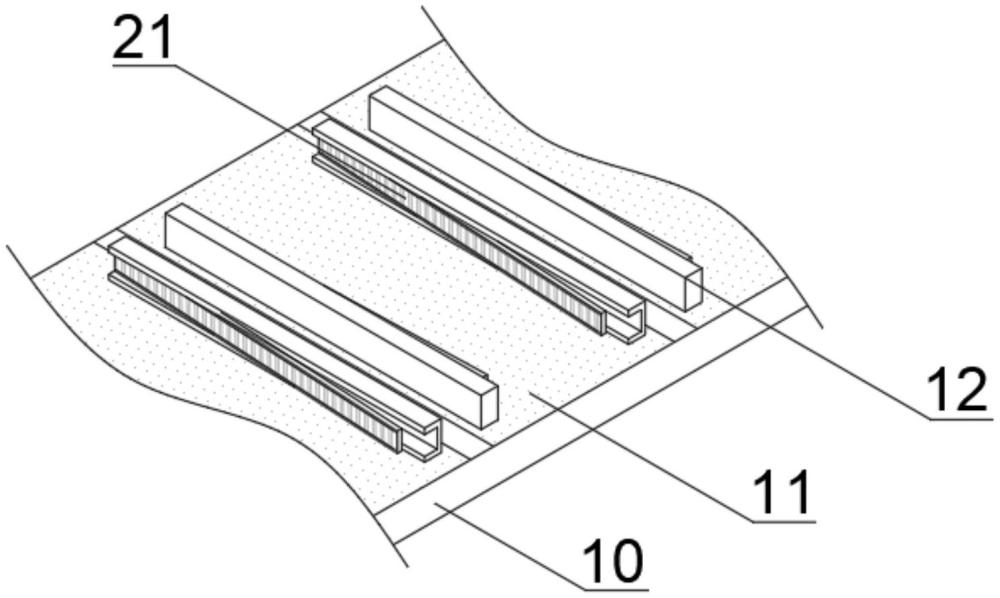
1.一種探測(cè)模塊裝配順序的夾持工裝,包括:驅(qū)動(dòng)座(1),其特征在于:所述驅(qū)動(dòng)座(1)的頂部固定安裝有夾具座(2),所述夾具座(2)的正面和背面均開(kāi)設(shè)有貫穿口(3),所述驅(qū)動(dòng)座(1)的一側(cè)固定安裝有調(diào)控座(4),所述驅(qū)動(dòng)座(1)的另一側(cè)開(kāi)設(shè)有出料口(5),所述調(diào)控座(4)的底部固定安裝有步進(jìn)電機(jī)(6),所述步進(jìn)電機(jī)(6)的輸出端固定安裝有轉(zhuǎn)向輪(7),所述轉(zhuǎn)向輪(7)的外表面固定安裝有限位套管(8),所述限位套管(8)的內(nèi)壁活動(dòng)安裝有抵觸塊(9),所述夾具座(2)內(nèi)壁的底部滑動(dòng)連接有工裝板(10),所述工裝板(10)的頂部等距設(shè)置有多組擺放座(11),所述擺放座(11)的頂部固定安裝有兩組夾持板(12),兩組所述夾持板(12)的外表面卡接有密封蓋(13)。
2.根據(jù)權(quán)利要求1所述的一種探測(cè)模塊裝配順序的夾持工裝,其特征在于:所述驅(qū)動(dòng)座(1)一側(cè)的前端固定安裝有驅(qū)動(dòng)電機(jī)(14),所述驅(qū)動(dòng)電機(jī)(14)的輸出端固定安裝有驅(qū)動(dòng)輪(15),所述驅(qū)動(dòng)座(1)的內(nèi)壁轉(zhuǎn)動(dòng)連接有多組銜接輪(16),所述驅(qū)動(dòng)輪(15)和銜接輪(16)的外表面纏繞設(shè)置有驅(qū)動(dòng)履帶(17),所述銜接輪(16)的外表面固定安裝有限位齒輪(18),所述工裝板(10)的底部固定安裝有限位齒板(19),且限位齒輪(18)與限位齒板(19)之間相互嚙合。
3.根據(jù)權(quán)利要求1所述的一種探測(cè)模塊裝配順序的夾持工裝,其特征在于:兩組所述夾持板(12)內(nèi)壁的相向面均轉(zhuǎn)動(dòng)連接有限位轉(zhuǎn)軸(20),所述限位轉(zhuǎn)軸(20)的外表面固定安裝有轉(zhuǎn)向夾板(21)。
4.根據(jù)權(quán)利要求1所述的一種探測(cè)模塊裝配順序的夾持工裝,其特征在于:所述夾持板(12)的內(nèi)壁固定安裝有多組限位彈簧(22),且限位彈簧(22)的前端固定連接于轉(zhuǎn)向夾板(21)的外表面。
5.根據(jù)權(quán)利要求1所述的一種探測(cè)模塊裝配順序的夾持工裝,其特征在于:所述限位套管(8)的內(nèi)底壁固定安裝有緩沖彈簧(23),且緩沖彈簧(23)的內(nèi)部設(shè)置有阻尼器,所述緩沖彈簧(23)的頂部固定連接于抵觸塊(9)的內(nèi)底壁。
6.根據(jù)權(quán)利要求1所述的一種探測(cè)模塊裝配順序的夾持工裝,其特征在于:所述驅(qū)動(dòng)座(1)的底部固定安裝有配重座(24),所述配重座(24)底部的前端和尾端均固定安裝有防滑底座(25)。
7.根據(jù)權(quán)利要求1所述的一種探測(cè)模塊裝配順序的夾持工裝,其特征在于:所述抵觸塊(9)的外表面固定安裝有導(dǎo)向滑塊(26),且導(dǎo)向滑塊(26)滑動(dòng)連接于限位套管(8)的內(nèi)壁。
技術(shù)總結(jié)
本技術(shù)涉及探測(cè)模塊加工設(shè)備技術(shù)領(lǐng)域,公開(kāi)了一種探測(cè)模塊裝配順序的夾持工裝,包括:驅(qū)動(dòng)座,所述驅(qū)動(dòng)座的頂部固定安裝有夾具座,所述夾具座的正面和背面均開(kāi)設(shè)有貫穿口,所述驅(qū)動(dòng)座的一側(cè)固定安裝有調(diào)控座,所述驅(qū)動(dòng)座的另一側(cè)開(kāi)設(shè)有出料口,所述調(diào)控座的底部固定安裝有步進(jìn)電機(jī),所述步進(jìn)電機(jī)的輸出端固定安裝有轉(zhuǎn)向輪,所述轉(zhuǎn)向輪的外表面固定安裝有限位套管。本技術(shù)通過(guò)工裝板在驅(qū)動(dòng)座內(nèi)的滑動(dòng)調(diào)節(jié),對(duì)加工模塊進(jìn)行包裹保護(hù),且在進(jìn)行加工時(shí),可通過(guò)抵觸塊的活動(dòng),對(duì)保護(hù)結(jié)構(gòu)進(jìn)行推動(dòng)剝離,繼而使得裝置配合模塊進(jìn)行加工前可具備獨(dú)立的保護(hù)結(jié)構(gòu),以及輔助剝離結(jié)構(gòu),繼而保障對(duì)模塊加工的安全有序性。
技術(shù)研發(fā)人員:陳雙
受保護(hù)的技術(shù)使用者:天合富奧汽車安全系統(tǒng)(長(zhǎng)春)有限公司
技術(shù)研發(fā)日:20240715
技術(shù)公布日:2025/4/28
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!