一種多功能工業(yè)機(jī)器人用機(jī)械手爪
本發(fā)明涉及工業(yè)機(jī)器人,具體是一種多功能工業(yè)機(jī)器人用機(jī)械手爪。
背景技術(shù):
1、工業(yè)機(jī)器人是自動化技術(shù)領(lǐng)域的重要成員,它們被廣泛應(yīng)用于汽車制造、電子裝配、食品加工及物流倉儲等行業(yè)。這些高精度機(jī)械臂通過預(yù)設(shè)程序或人工智能算法控制,能夠執(zhí)行焊接、搬運(yùn)、噴涂、裝配等多種復(fù)雜任務(wù)。工業(yè)機(jī)器人不僅大幅提升了生產(chǎn)效率與質(zhì)量,還顯著降低了人力成本與作業(yè)風(fēng)險。隨著技術(shù)的不斷進(jìn)步,它們正日益變得更加智能、靈活與協(xié)同,為現(xiàn)代工業(yè)的發(fā)展注入了強(qiáng)大動力,引領(lǐng)著制造業(yè)向智能制造的轉(zhuǎn)型升級;
2、但是一般的多功能工業(yè)機(jī)器人用機(jī)械手爪在對不規(guī)則的工件進(jìn)行夾持時,會存在不穩(wěn)定的情況發(fā)生,機(jī)械手爪無法牢固夾持工件,易導(dǎo)致工件掉落或損壞,造成廢品增加,所以需要進(jìn)一步改進(jìn)。
技術(shù)實現(xiàn)思路
1、本發(fā)明的目的在于:為了解決上述背景技術(shù)提出的問題,提供一種多功能工業(yè)機(jī)器人用機(jī)械手爪。
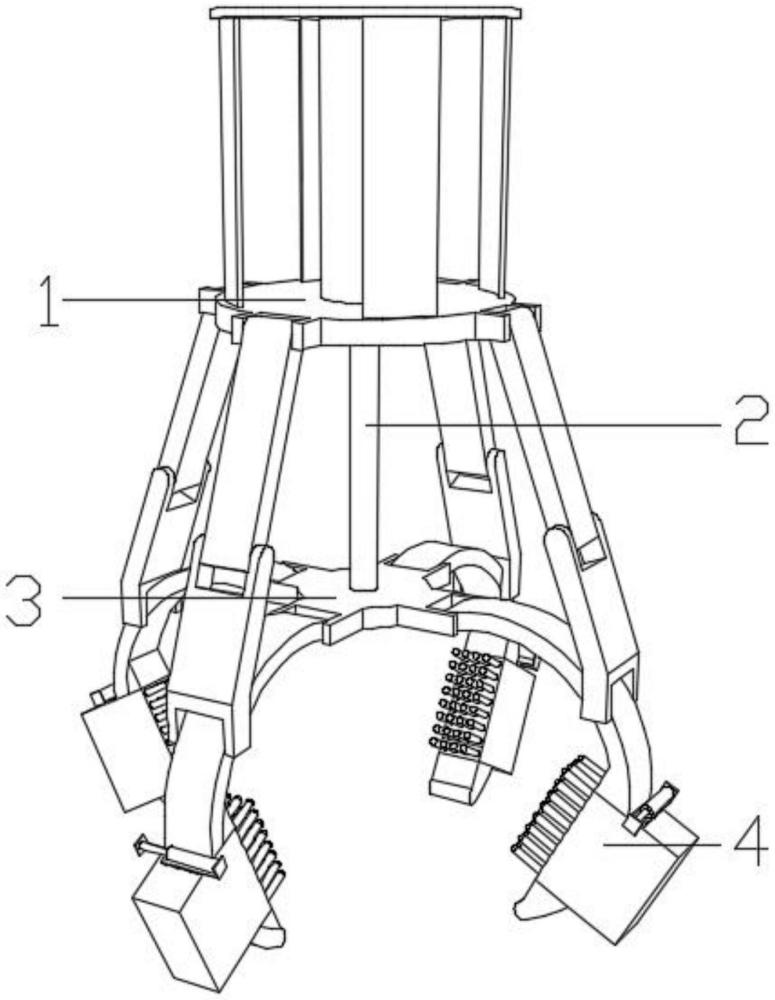
2、為實現(xiàn)上述目的,本發(fā)明提供如下技術(shù)方案:一種多功能工業(yè)機(jī)器人用機(jī)械手爪,包括:連接座和氣缸,所述氣缸下方輸出軸固接有控制座,所述控制座與所述連接座之間設(shè)置有用于對工件進(jìn)行夾持的夾持臂,所述氣缸為現(xiàn)有技術(shù)。
3、作為本發(fā)明再進(jìn)一步的方案:所述夾持臂包括有設(shè)置在所述連接座側(cè)面一端的轉(zhuǎn)動條,所述轉(zhuǎn)動條側(cè)面一端設(shè)置有第一轉(zhuǎn)軸,所述轉(zhuǎn)動條通過第一轉(zhuǎn)軸轉(zhuǎn)動連接在所述連接座側(cè)面,所述轉(zhuǎn)動條側(cè)面一端轉(zhuǎn)動連接有轉(zhuǎn)動塊,所述轉(zhuǎn)動塊側(cè)面一端固接有弧形塊,所述弧形塊側(cè)面一端設(shè)置有第二轉(zhuǎn)軸,所述弧形塊通過第二轉(zhuǎn)軸轉(zhuǎn)動連接在所述控制座側(cè)面,所述弧形塊側(cè)面一端固接有連接箱,所述連接箱內(nèi)部開設(shè)有容置所述限位桿滑動的腔,所述連接箱內(nèi)部開設(shè)有與所述鎖定組件和所述彈簧相適配的腔,所述連接箱側(cè)面一端滑動連接有限位桿,所述限位桿側(cè)面較為粗糙,可以在與所述鎖定塊相接觸時產(chǎn)生更大的摩擦力,所述限位桿側(cè)面一端固接有彈簧,所述限位桿側(cè)面一端設(shè)置有鎖定組件,所述鎖定組件側(cè)面一端設(shè)置有電動伸縮桿。
4、作為本發(fā)明再進(jìn)一步的方案:所述鎖定組件包括有設(shè)置在所述電動伸縮桿側(cè)面輸出端的第一固定組件,所述電動伸縮桿側(cè)面一端設(shè)置有第二固定組件。
5、作為本發(fā)明再進(jìn)一步的方案:所述第一固定組件包括有固接在所述電動伸縮桿側(cè)面一端的連接板,所述連接板側(cè)面一端固接有連接條,所述連接條下方一端固接有連接塊,所述連接塊下方一端固接有鎖定塊,所述鎖定塊與所述限位桿相接觸的面較為粗糙,可以通過擠壓接觸對限位桿進(jìn)行定位。
6、作為本發(fā)明再進(jìn)一步的方案:所述夾持臂數(shù)量設(shè)置有四組,位于所述連接座側(cè)面四端對稱設(shè)置。
7、作為本發(fā)明再進(jìn)一步的方案:所述限位桿和所述彈簧數(shù)量設(shè)置有多組,位于所述連接箱內(nèi)部均勻排列。
8、作為本發(fā)明再進(jìn)一步的方案:所述連接塊和所述鎖定塊數(shù)量設(shè)置有多組,位于所述連接條下方均勻設(shè)置,所述鎖定塊側(cè)面一端開設(shè)有與所述限位桿相適配的斜槽。
9、與現(xiàn)有技術(shù)相比,本發(fā)明具備以下有益效果:
10、本發(fā)明中通過夾持臂等可以對不規(guī)則的工件進(jìn)行穩(wěn)定的夾持,能夠保證夾持時的穩(wěn)定性,避免了工件在夾持后發(fā)生掉落的情況發(fā)生,減少了廢品的增加,并且可以適配不同形狀的工件并對其進(jìn)行穩(wěn)定的夾持。
技術(shù)特征:
1.一種多功能工業(yè)機(jī)器人用機(jī)械手爪,包括:連接座(1)和氣缸(2),其特征在于,所述氣缸(2)下方輸出軸固接有控制座(3),所述控制座(3)與所述連接座(1)之間設(shè)置有用于對工件進(jìn)行夾持的夾持臂(4)。
2.根據(jù)權(quán)利要求1所述的一種多功能工業(yè)機(jī)器人用機(jī)械手爪,其特征在于,所述夾持臂(4)包括有設(shè)置在所述連接座(1)側(cè)面一端的轉(zhuǎn)動條(41),所述轉(zhuǎn)動條(41)側(cè)面一端設(shè)置有第一轉(zhuǎn)軸(42),所述轉(zhuǎn)動條(41)側(cè)面一端轉(zhuǎn)動連接有轉(zhuǎn)動塊(410),所述轉(zhuǎn)動塊(410)側(cè)面一端固接有弧形塊(43),所述弧形塊(43)側(cè)面一端設(shè)置有第二轉(zhuǎn)軸(44),所述弧形塊(43)側(cè)面一端固接有連接箱(45),所述連接箱(45)側(cè)面一端滑動連接有限位桿(46),所述限位桿(46)側(cè)面一端固接有彈簧(49),所述限位桿(46)側(cè)面一端設(shè)置有鎖定組件(48),所述鎖定組件(48)側(cè)面一端設(shè)置有電動伸縮桿(47)。
3.根據(jù)權(quán)利要求2所述的一種多功能工業(yè)機(jī)器人用機(jī)械手爪,其特征在于,所述鎖定組件(48)包括有設(shè)置在所述電動伸縮桿(47)側(cè)面輸出端的第一固定組件(481),所述電動伸縮桿(47)側(cè)面一端設(shè)置有第二固定組件(482)。
4.根據(jù)權(quán)利要求3所述的一種多功能工業(yè)機(jī)器人用機(jī)械手爪,其特征在于,所述第一固定組件(481)包括有固接在所述電動伸縮桿(47)側(cè)面一端的連接板(4811),所述連接板(4811)側(cè)面一端固接有連接條(4812),所述連接條(4812)下方一端固接有連接塊(4813),所述連接塊(4813)下方一端固接有鎖定塊(4814)。
5.根據(jù)權(quán)利要求1所述的一種多功能工業(yè)機(jī)器人用機(jī)械手爪,其特征在于,所述夾持臂(4)數(shù)量設(shè)置有四組,位于所述連接座(1)側(cè)面四端對稱設(shè)置。
6.根據(jù)權(quán)利要求2所述的一種多功能工業(yè)機(jī)器人用機(jī)械手爪,其特征在于,所述限位桿(46)和所述彈簧(49)數(shù)量設(shè)置有多組,位于所述連接箱(45)內(nèi)部均勻排列。
7.根據(jù)權(quán)利要求4所述的一種多功能工業(yè)機(jī)器人用機(jī)械手爪,其特征在于,所述連接塊(4813)和所述鎖定塊(4814)數(shù)量設(shè)置有多組,位于所述連接條(4812)下方均勻設(shè)置,所述鎖定塊(4814)側(cè)面一端開設(shè)有與所述限位桿(46)相適配的斜槽。
技術(shù)總結(jié)
本發(fā)明公開了一種多功能工業(yè)機(jī)器人用機(jī)械手爪,包括:連接座和氣缸,所述氣缸下方輸出軸固接有控制座,所述控制座與所述連接座之間設(shè)置有用于對工件進(jìn)行夾持的夾持臂;本發(fā)明中通過夾持臂等可以對不規(guī)則的工件進(jìn)行穩(wěn)定的夾持,能夠保證夾持時的穩(wěn)定性,避免了工件在夾持后發(fā)生掉落的情況發(fā)生,減少了廢品的增加,并且可以適配不同形狀的工件并對其進(jìn)行穩(wěn)定的夾持。
技術(shù)研發(fā)人員:吳嬌,齊洪方,湯劍
受保護(hù)的技術(shù)使用者:武漢華夏理工學(xué)院
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!