一種仿人背負護理機器人的腿部柔性支撐裝置
本發明屬于護理機器人,具體是一種仿人背負護理機器人的腿部柔性支撐裝置。
背景技術:
1、仿人背負護理機器人能夠通過仿人背負的方式完成對被護理人在護理床、輪椅、馬桶、沙發等之間的移乘任務。在背負移乘過程中,被護理人趴在仿人背負護理機器人上,被護理人的胸部緊貼在仿人背負護理機器人的胸靠上,且雙臂越過機器人的腋下支撐結構,使雙手扶住仿人背負護理機器人的握把。仿人背負護理機器人通過腋下支撐結構、胸靠等對被護理人進行支撐,然而,現有的移乘機器人一部分沒有設置腿部支撐結構,不僅難以保證下肢失能或半失能患者在背負移乘過程中的安全性,而且會增大被護理人員腋下和胸部的受力,導致使用舒適性較差;另一部分的腿部支撐結構通常采用固定的剛性支撐,無法有效貼合不同體型和腿型的被護理人,容易因局部壓力過大導致疼痛或血液循環受阻,且難以有效防止被護理人在移乘過程中的滑落和意外分離。
2、因此,針對背負移乘過程中人體腿部有效支撐的問題,本發明設計一種仿人背負護理機器人的腿部柔性支撐裝置。
技術實現思路
1、針對現有技術的不足,本發明擬解決的技術問題是,提供一種仿人背負護理機器人的腿部柔性支撐裝置。
2、本發明解決所述技術問題采用如下的技術方案:
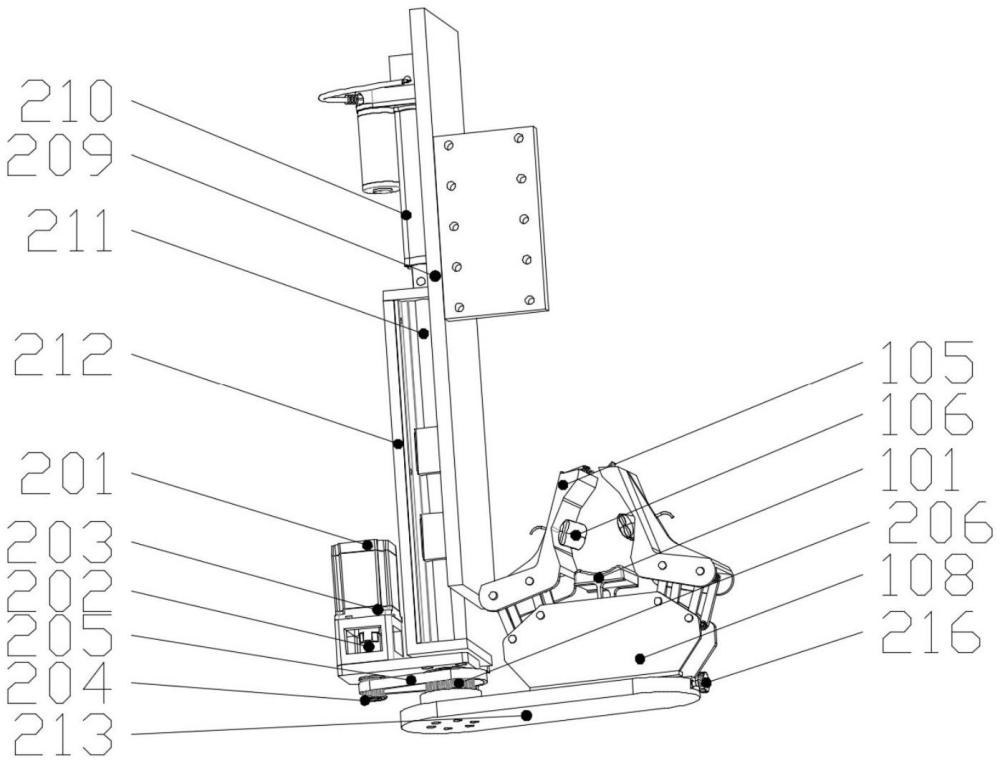
3、一種仿人背負護理機器人的腿部柔性支撐裝置,包括腿部包攏模塊和位姿調節模塊;兩個位姿調節模塊對稱安裝在仿人背負護理機器人胸靠的左、右側,每個位姿調節模塊連接一個腿部包攏模塊,位姿調節模塊用于調節腿部包攏模塊的位置;
4、所述腿部包攏模塊包括腿托支架、末端包攏板、調節氣囊、鎖緊卡扣、連接支架、復位彈簧和多連桿機構;其中,連接支架與位姿調節模塊的滑臺固連,多個復位彈簧設置在連接支架上,腿托支架的后端與所有復位彈簧的自由端固連,腿托支架的前端與人體腿部后側緊密接觸;腿托支架后端的兩側分別設有多連桿機構,兩個末端包攏板分別與兩側的多連桿機構連接,通過多連桿機構實現末端包攏板的收攏和展開;兩個末端包攏板內側的中部分別設有一個調節氣囊,調節氣囊與人體腿部接觸;鎖緊卡扣的兩端分別與兩個末端包攏板的端部連接。
5、進一步的,所述位姿調節模塊包括步進電機、電機支架、小齒輪、同步帶、大齒輪、限位塊、多孔安裝板、電動推桿、滑桿、滑桿支架、旋轉支撐臺、滑臺和螺紋桿;其中,多孔安裝板的一側與仿人背負護理機器人的胸靠固連,電動推桿的缸筒端與多孔安裝板的上端固連,電動推桿的桿端與滑桿的一端固連,滑桿的另一端與多孔安裝板滑動連接,滑桿支架的一端與滑桿固連,電機支架位于滑桿支架的另一端,步進電機固定在電機支架上,步進電機的輸出軸與小齒輪連接,大齒輪的上端與電機支架轉動連接,同步帶與小齒輪和大齒輪嚙合,大齒輪的下端與旋轉支撐臺固連;旋轉支撐臺沿長度方向設有滑槽,螺紋桿轉動安裝在滑槽內,滑臺與螺紋桿滑動連接。
6、進一步的,所述多連桿機構包括第一連桿、v型連桿和第二連桿;第一連桿的一端與腿托支架轉動連接,v型連桿的一端與第一連桿的另一端轉動連接,v型連桿的中部與連接支架的中部轉動連接,v型連桿的另一端與末端包攏板一端的外側轉動連接,第二連桿的一端與連接支架的上部轉動連接,另一端與末端包攏板一端的內側轉動連接。
7、與現有技術相比,本發明的有益效果在于:
8、腿部包攏模塊可為被護理人腿部提供穩定支撐,減小傳統移乘模式下人體胸部和腋下所受的壓力,緊密而舒適地貼合不同體型和腿型,防止被護理者從坐墊上意外滑落導致的安全問題,顯著提升被護理人的舒適度。復位彈簧既可在空載時使得末端包攏板展開,以方便人體腿部放置,又可以自適應地因不同體型被護理人的腿部施加給腿托支架的壓力不同而改變壓縮量,進而調節末端包攏板的收攏程度。進一步地,末端包攏板上的調節氣囊可以被動性地柔性調節施加給被護理人腿部兩側的壓力,有效減少在背負過程中因晃動或不當接觸造成的不適感。末端包攏板的鎖緊卡扣作為額外的鎖定結構,可為被護理人提供輔助包攏壓力,維持穩定的包攏狀態。
9、位姿調節模塊允許根據實際場景通過調整腿部包攏模塊的位置和角度以調整被護理人的姿態和高度,進而提高穩定性和舒適性。該裝置能夠應用于多種護理場景,滿足不同用戶的個性化需求。位姿調節模塊可主動調節腿部包攏模塊在前后方向上的位置以便被護理人腿部放置,還可主動調節腿部包攏模塊在左右方向上的位置以適應不同腿型的被護理人的腿部姿態,還可以實現腿部包攏模塊的旋轉,方便機器人背起和放下被護理人。
10、腿部包攏模塊和位姿調節模塊的設計緊湊,占用空間小,便于在仿人背負移乘護理機器人上安裝和使用,不會增加額外的體積負擔。
技術特征:
1.一種仿人背負護理機器人的腿部柔性支撐裝置,其特征在于,該裝置包括腿部包攏模塊和位姿調節模塊;兩個位姿調節模塊對稱安裝在仿人背負護理機器人胸靠的左、右側,每個位姿調節模塊連接一個腿部包攏模塊,位姿調節模塊用于調節腿部包攏模塊的位置;
2.根據權利要求1所述的仿人背負護理機器人的腿部柔性支撐裝置,其特征在于,所述位姿調節模塊包括步進電機、電機支架、小齒輪、同步帶、大齒輪、限位塊、多孔安裝板、電動推桿、滑桿、滑桿支架、旋轉支撐臺、滑臺和螺紋桿;其中,多孔安裝板的一側與仿人背負護理機器人的胸靠固連,電動推桿的缸筒端與多孔安裝板的上端固連,電動推桿的桿端與滑桿的一端固連,滑桿的另一端與多孔安裝板滑動連接,滑桿支架的一端與滑桿固連,電機支架位于滑桿支架的另一端,步進電機固定在電機支架上,步進電機的輸出軸與小齒輪連接,大齒輪的上端與電機支架轉動連接,同步帶與小齒輪和大齒輪嚙合,大齒輪的下端與旋轉支撐臺固連;旋轉支撐臺沿長度方向設有滑槽,螺紋桿轉動安裝在旋轉支撐臺的滑槽內,滑臺與螺紋桿滑動連接。
3.根據權利要求1或2所述的仿人背負護理機器人的腿部柔性支撐裝置,其特征在于,所述多連桿機構包括第一連桿、v型連桿和第二連桿;第一連桿的一端與腿托支架轉動連接,v型連桿的一端與第一連桿的另一端轉動連接,v型連桿的中部與連接支架的中部轉動連接,v型連桿的另一端與末端包攏板一端的外側轉動連接,第二連桿的一端與連接支架的上部轉動連接,另一端與末端包攏板一端的內側轉動連接。
技術總結
本發明屬于護理機器人技術領域,具體是一種仿人背負護理機器人的腿部柔性支撐裝置。該裝置包括腿部包攏模塊和位姿調節模塊;兩個位姿調節模塊對稱安裝在機器人胸靠的左、右側,每個位姿調節模塊連接一個腿部包攏模塊;腿部包攏模塊包括腿托支架、末端包攏板、調節氣囊、鎖緊卡扣、連接支架、復位彈簧和多連桿機構;多個復位彈簧設置在連接支架上,腿托支架的后端與復位彈簧的自由端固連,腿托支架后端的兩側分別設有多連桿機構,兩個末端包攏板分別與兩側的多連桿機構連接,兩個末端包攏板內側的中部分別設有一個調節氣囊,鎖緊卡扣的兩端分別與兩個末端包攏板的端部連接。能夠根據人體體型和腿型自適應調節末端包攏板的收攏程度,提高與腿部的貼合程度,提升使用舒適度。
技術研發人員:劉騰,貝智璇,王軒,戚開誠,商鵬,張建軍,郭士杰
受保護的技術使用者:河北工業大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!