一種傳感器升降式滅火機器人的制作方法
本技術涉及滅火機器人,具體為一種傳感器升降式滅火機器人。
背景技術:
1、滅火機器人是一種專門設計用于滅火任務的機器人,它結合了多種技術,包括單片機控制、紅外火焰傳感、電機驅動、紅外傳感電路和地面灰度傳感電路等,這些技術使得滅火機器人能夠迅速、準確地定位火源,并進行有效的滅火操作。
2、在滅火機器人的使用過程中,需要人工調整滅火管的傾斜角度以及高度,由于每次滅火任務可能會多個滅火機器人一起工作,因此每個滅火機器人都需要單獨進行滅火管位置的調節,非常耽誤時間,因此提出了一種傳感器升降式滅火機器人用于解決上述問題。
技術實現思路
1、1.實用新型要解決的技術問題
2、針對現有技術的不足,本實用新型的目的在于提供一種傳感器升降式滅火機器人,旨在解決現有技術下每次滅火任務可能會多個滅火機器人一起工作,因此每個滅火機器人都需要單獨進行滅火管位置的調節,非常耽誤時間的問題。
3、2.技術方案
4、為實現上述目的,本實用新型提供如下技術方案:
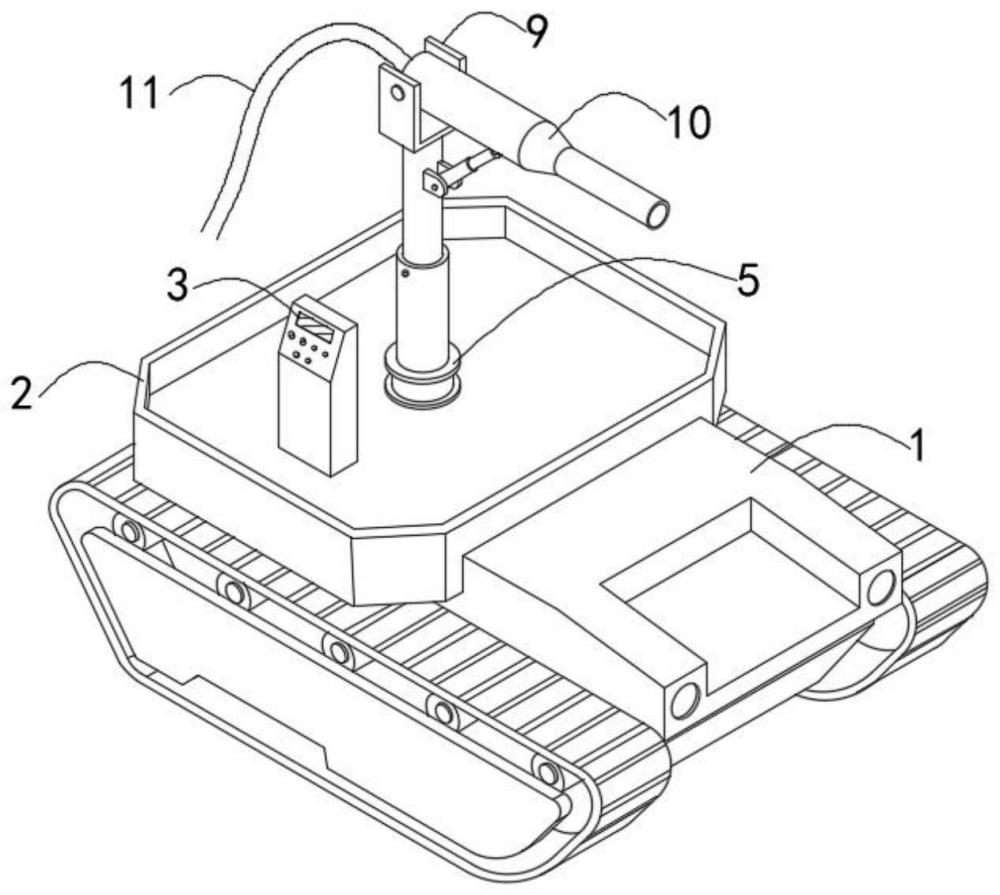
5、一種傳感器升降式滅火機器人,包括移動底座,所述移動底座的頂部一端安裝有安裝平臺,所述安裝平臺的頂部一端安裝有控制座,所述控制座的頂部安裝有顯示屏以及控制按鍵,所述安裝平臺的頂部中心處安裝有轉動座,所述轉動座的頂部安裝有液壓桿,所述液壓桿的頂部一側面上嵌入式安裝有位移傳感器,所述位移傳感器與控制座之間為電性連接。
6、作為本實用新型優選的方案,所述安裝平臺的頂部中心處安裝有正反電機軸,所述轉動座安裝在正反電機軸的頂部,所述轉動座的底部與安裝平臺的頂部之間為轉動連接。
7、作為本實用新型優選的方案,所述液壓桿的頂部固定安裝有u型架,所述液壓桿的一側面頂部安裝有轉動連接板,所述轉動連接板的內側轉動連接有電推桿。
8、作為本實用新型優選的方案,所述u型架的頂部內側安裝有滅火筒,所述滅火筒的一端連接有進料管,所述進料管與供水或供干粉設備進行連接,所述滅火筒的一端在u型架的內側為轉動連接。
9、作為本實用新型優選的方案,所述滅火筒的底部同樣安裝有轉動連接板,所述滅火筒底部的轉動連接板一端與電推桿的一端之間為轉動連接,所述電推桿為初始狀態時滅火筒與液壓桿處于垂直狀態。
10、作為本實用新型優選的方案,所述進料管的一端與滅火筒的內部相通,且所述滅火筒的一端開設有一個噴射口。
11、3.有益效果
12、與現有技術相比,本實用新型的有益效果是:
13、本實用新型通過液壓桿上的位移傳感器與控制座之間電性連接,在控制座上可以調節液壓桿的升降高度,并通過位移傳感器進行監測,達到升降高度后液壓桿停止升降,然后后續到場的滅火機器人與第一臺滅火機器人一字排開,先將滅火筒調節至最高狀態,然后根據第一臺已經調好高度的滅火機器人的升降高度,在控制座上輸入升降高度,從而將后續的滅火機器人快速進行高度調節投入滅火作業,有效提高了滅火效率。
技術特征:
1.一種傳感器升降式滅火機器人,包括移動底座(1),其特征在于:所述移動底座(1)的頂部一端安裝有安裝平臺(2),所述安裝平臺(2)的頂部一端安裝有控制座(3),所述控制座(3)的頂部安裝有顯示屏以及控制按鍵,所述安裝平臺(2)的頂部中心處安裝有轉動座(5),所述轉動座(5)的頂部安裝有液壓桿(6),所述液壓桿(6)的頂部一側面上嵌入式安裝有位移傳感器(601),所述位移傳感器(601)與控制座(3)之間為電性連接。
2.根據權利要求1所述的一種傳感器升降式滅火機器人,其特征在于:所述安裝平臺(2)的頂部中心處安裝有正反電機軸(4),所述轉動座(5)安裝在正反電機軸(4)的頂部,所述轉動座(5)的底部與安裝平臺(2)的頂部之間為轉動連接。
3.根據權利要求1所述的一種傳感器升降式滅火機器人,其特征在于:所述液壓桿(6)的頂部固定安裝有u型架(9),所述液壓桿(6)的一側面頂部安裝有轉動連接板(7),所述轉動連接板(7)的內側轉動連接有電推桿(8)。
4.根據權利要求3所述的一種傳感器升降式滅火機器人,其特征在于:所述u型架(9)的頂部內側安裝有滅火筒(10),所述滅火筒(10)的一端連接有進料管(11),所述進料管(11)與供水或供干粉設備進行連接,所述滅火筒(10)的一端在u型架(9)的內側為轉動連接。
5.根據權利要求4所述的一種傳感器升降式滅火機器人,其特征在于:所述滅火筒(10)的底部同樣安裝有轉動連接板(7),所述滅火筒(10)底部的轉動連接板(7)一端與電推桿(8)的一端之間為轉動連接,所述電推桿(8)為初始狀態時滅火筒(10)與液壓桿(6)處于垂直狀態。
6.根據權利要求4所述的一種傳感器升降式滅火機器人,其特征在于:所述進料管(11)的一端與滅火筒(10)的內部相通,且所述滅火筒(10)的一端開設有一個噴射口。
技術總結
本技術公開了一種傳感器升降式滅火機器人,包括移動底座,所述移動底座的頂部一端安裝有安裝平臺,所述安裝平臺的頂部一端安裝有控制座,所述控制座的頂部安裝有顯示屏以及控制按鍵,所述安裝平臺的頂部中心處安裝有轉動座,本技術通過液壓桿上的位移傳感器與控制座之間電性連接,在控制座上可以調節液壓桿的升降高度,并通過位移傳感器進行監測,達到升降高度后液壓桿停止升降,然后后續到場的滅火機器人與第一臺滅火機器人一字排開,先將滅火筒調節至最高狀態,然后根據第一臺已經調好高度的滅火機器人的升降高度,在控制座上輸入升降高度,從而將后續的滅火機器人快速進行高度調節投入滅火作業,有效提高了滅火效率。
技術研發人員:陳春燕
受保護的技術使用者:江蘇鑫焱消防裝備有限公司
技術研發日:20240508
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!