一種杯把手焊接機的制作方法
本技術涉及焊接設備領域,具體涉及一種杯把手焊接機。
背景技術:
1、圓杯,呈圓柱狀體。合格的圓杯產品由各個組成部件經過焊接完成,目前,在其中一種現有技術中,圓杯的焊接通常都是通過焊接工人手持焊槍將圓杯焊接在一起,但是,這種焊接方式生產效率較低,且對工人有損害其健康的風險。后來,有人發明了自動化焊接機,通過自動化程序控制焊槍的移動,從而將圓杯焊接起來。但是,這種自動化焊接機一方面結構較為復雜,另一方面,對于圓杯的夾持不夠穩定,而且在圓杯的某道縫隙焊接完成后需要調整圓杯的位置,以對圓杯上其他位置處的縫隙進行焊接,而對于這種需求目前的焊接機無法實現。
技術實現思路
1、本實用新型的目的是為了解決現有技術中存在的缺點,而提出的一種杯把手焊接機。
2、為了實現上述目的,本實用新型采用了如下技術方案:一種杯把手焊接機,包括:
3、焊槍;
4、圓杯固持機構,所述圓杯固持機構包括固持模具、第一驅動氣缸、第二驅動氣缸、第一固持單元、第二固持單元,所述固持模具用以安放待焊接的圓杯,所述第一固持單元固定連接于所述第一驅動氣缸,所述第二固持單元固定連接于所述第二驅動氣缸,所述第一驅動氣缸驅動所述第一固持單元移動,所述第二驅動氣缸驅動所述第二固持單元移動,所述第一固持單元和所述第二固持單元用以將所述圓杯抵壓住,以此使得所述圓杯被牢牢固定在所述固持模具上。
5、進一步的,所述圓杯固持機構還包括x方向移動組件,所述x方向移動組件帶動所述第一固持單元和所述第二固持單元沿著x方向往復移動。
6、進一步的,所述x方向移動組件包括x方向滑動軌道、第一滑塊、支撐底板、支撐板、后退氣缸,所述第一滑塊滑動連接于所述x方向滑動軌道,以此使得所述第一滑塊在所述x方向滑動軌道上往復滑動;所述支撐底板和所述第一滑塊固定安裝在一起,所述支撐板固定安裝在所述支撐底板上,所述第一驅動氣缸和所述第二驅動氣缸固定安裝在所述支撐板上,所述后退氣缸固定連接于所述支撐底板,以此使得所述后退氣缸帶動所述支撐底板沿著所述x方向滑動軌道延伸的方向滑動,從而使得所述第一驅動氣缸和所述第二驅動氣缸同步移動,使得所述第一固持單元和所述第二固持單元同步同方向移動,以此使得所述第一固持單元和所述第二固持單元離開所述圓杯。
7、進一步的,所述圓杯固持機構還包括z方向移動組件,所述z方向移動組件帶動所述第一固持單元和所述第二固持單元沿著z方向往復移動,所述z方向為豎直方向。
8、進一步的,所述z方向移動組件包括第一豎直支撐板、第二豎直支撐板、第一z方向滑動軌道、第二z方向滑動軌道、第一連接件、第二連接件、第一z方向滑動塊、第二z方向滑動塊,所述第一豎直支撐板和所述第二豎直支撐板均固定安裝在所述支撐板上,所述第一z方向滑動軌道固定安裝在所述第一豎直支撐板上,所述第二z方向滑動軌道固定安裝在所述第二豎直支撐板上,所述第一連接件一方面和所述第一驅動氣缸固定連接,所述第一連接件另一方面和所述第一z方向滑動塊固定連接,所述第一z方向滑動塊滑動連接于所述第一z方向滑動軌道,所述第一固持單元固定安裝在所述第一連接件,以此使得所述第一驅動氣缸帶動所述第一連接件在z方向上往復移動,從而帶動所述第一固持單元在z方向上移動,以此使得所述第一固持單元夾緊或遠離所述圓杯;所述第二連接件一方面和所述第二驅動氣缸固定連接,所述第二連接件另一方面和所述第二z方向滑動塊固定連接,所述第二z方向滑動塊滑動連接于所述第二z方向滑動軌道,所述第二固持單元固定安裝在所述第二連接件上,以此使得所述第二驅動氣缸帶動所述第二連接件在z方向上往復移動,從而帶動所述第二固持單元在z方向上移動,以此使得所述第二固持單元夾緊或遠離所述圓杯。
9、進一步的,所述第一固持單元包括第一固持單元本體、第一夾緊部,所述第一夾緊部固定連接于所述第一固持單元本體的一個端部,所述第一固持單元本體的另一端部固定連接于所述第一連接件,所述第一夾緊部自所述第一固持單元本體的一個端部向下凸出預設長度,所述第一夾緊部用以壓緊所述圓杯;所述第二固持單元包括第二固持單元本體、第二夾緊部,所述第二夾緊部固定連接于所述第二固持單元的一個端部,所述第二固持單元本體的另一端部固定連接于所述第二連接件,所述第二夾緊部自所述第二固持單元本體的一個端部向下凸出預設長度,所述第二夾緊部用以壓緊所述圓杯。
10、進一步的,所述圓杯固持機構還包括固定安裝底板,所述x方向滑動軌道、所述固持模具均固定安裝在所述固定安裝底板上;所述后退氣缸的一端固定連接于所述固定安裝底板上,所述后退氣缸的另一端上具有有伸縮桿,所述伸縮桿和所述支撐底板固定連接,以此使得所述后退氣缸驅動所述伸縮桿帶動所述支撐底板移動。
11、進一步的,所述圓杯固持機構還包括旋轉驅動電機、減速機、固定連接圓盤,所述旋轉驅動電機和所述減速機連接,所述減速機具有轉動軸,所述轉動軸和所述固定連接圓盤固定連接,所述固定連接圓盤又和所述固定安裝底板固定安裝在一起,以此使得所述旋轉驅動電機帶動所述轉動軸轉動,從而帶動所述固定安裝底板旋轉。
12、進一步的,所述固持模具包括固持底板、第一夾持板、第二夾持板、第三夾持板,所述第一夾持板、所述第二夾持板和所述第三夾持板均固定連接于所述固持底板,所述第二夾持板和所述第一夾持板的一端固定連接,所述第三夾持板和所述第一夾持板的另一端固定連接;所述固持底板、所述第一夾持板、所述第二夾持板和所述第三夾持板共同圍合成一夾持腔,所述夾持腔用以夾持所述圓杯。
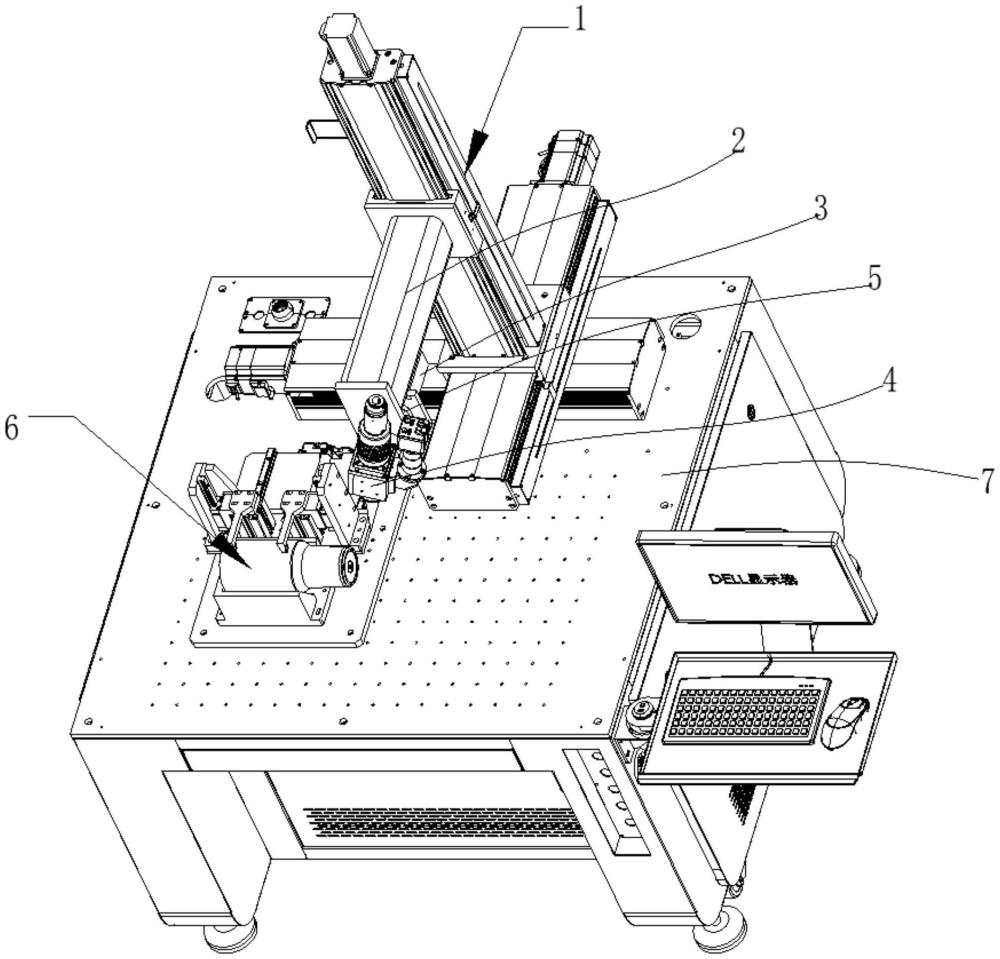
13、進一步的,還包括三軸電動模組、連接架、焊槍旋轉電機、支撐平臺,所述連接架的一端固定連接于所述三軸電動模組、所述焊槍旋轉電機安裝在所述連接架的另一端,所述焊槍旋轉電機和所述焊槍連接,以此使得所述焊槍旋轉電機帶動所述焊槍旋轉;所述三軸電動模組帶動所述連接架在x方向、y方向和z方向上移動,從而帶動所述焊槍在x方向、y方向和z方向上移動;x方向、y方向、z方向兩兩垂直;所述三軸電動模組和所述圓杯固持機構均固定安裝在所述支撐平臺上。
14、本申請的有益效果是:本申請提供了一種杯把手焊接機,鑒于圓杯固持機構上的第一固持單元和第二固持單元能夠在x方向和z方向移動,在z方向上移動動,第一固持單元和第二固持單元能夠實現對圓杯的夾緊和松開,當第一固持單元和第二固持單元將圓杯夾緊時,焊槍完成對圓杯的焊接;鑒于通過旋轉驅動電機帶動圓杯調整位置,從而使得焊槍焊接圓杯的不同位置,以此實現全方位焊接的目的;本申請提供的該杯把手焊接機自動化程度高,可以實現對圓杯的全方位焊接,且對圓杯的夾緊穩定性高,圓杯不易松脫,從而實現焊接性能好,并兼具工作效率高的優點。
技術特征:
1.一種杯把手焊接機,其特征在于,包括:
2.根據權利要求1所述的杯把手焊接機,其特征在于,所述圓杯固持機構還包括x方向移動組件,所述x方向移動組件帶動所述第一固持單元和所述第二固持單元沿著x方向往復移動。
3.根據權利要求2所述的杯把手焊接機,其特征在于,所述x方向移動組件包括x方向滑動軌道、第一滑塊、支撐底板、支撐板、后退氣缸,所述第一滑塊滑動連接于所述x方向滑動軌道,以此使得所述第一滑塊在所述x方向滑動軌道上往復滑動;所述支撐底板和所述第一滑塊固定安裝在一起,所述支撐板固定安裝在所述支撐底板上,所述第一驅動氣缸和所述第二驅動氣缸固定安裝在所述支撐板上,所述后退氣缸固定連接于所述支撐底板,以此使得所述后退氣缸帶動所述支撐底板沿著所述x方向滑動軌道延伸的方向滑動,從而使得所述第一驅動氣缸和所述第二驅動氣缸同步移動,使得所述第一固持單元和所述第二固持單元同步同方向移動,以此使得所述第一固持單元和所述第二固持單元離開所述圓杯。
4.根據權利要求3所述的杯把手焊接機,其特征在于,所述圓杯固持機構還包括z方向移動組件,所述z方向移動組件帶動所述第一固持單元和所述第二固持單元沿著z方向往復移動,所述z方向為豎直方向。
5.根據權利要求4所述的杯把手焊接機,其特征在于,所述z方向移動組件包括第一豎直支撐板、第二豎直支撐板、第一z方向滑動軌道、第二z方向滑動軌道、第一連接件、第二連接件、第一z方向滑動塊、第二z方向滑動塊,所述第一豎直支撐板和所述第二豎直支撐板均固定安裝在所述支撐板上,所述第一z方向滑動軌道固定安裝在所述第一豎直支撐板上,所述第二z方向滑動軌道固定安裝在所述第二豎直支撐板上,所述第一連接件一方面和所述第一驅動氣缸固定連接,所述第一連接件另一方面和所述第一z方向滑動塊固定連接,所述第一z方向滑動塊滑動連接于所述第一z方向滑動軌道,所述第一固持單元固定安裝在所述第一連接件,以此使得所述第一驅動氣缸帶動所述第一連接件在z方向上往復移動,從而帶動所述第一固持單元在z方向上移動,以此使得所述第一固持單元夾緊或遠離所述圓杯;所述第二連接件一方面和所述第二驅動氣缸固定連接,所述第二連接件另一方面和所述第二z方向滑動塊固定連接,所述第二z方向滑動塊滑動連接于所述第二z方向滑動軌道,所述第二固持單元固定安裝在所述第二連接件上,以此使得所述第二驅動氣缸帶動所述第二連接件在z方向上往復移動,從而帶動所述第二固持單元在z方向上移動,以此使得所述第二固持單元夾緊或遠離所述圓杯。
6.根據權利要求5所述的杯把手焊接機,其特征在于,所述第一固持單元包括第一固持單元本體、第一夾緊部,所述第一夾緊部固定連接于所述第一固持單元本體的一個端部,所述第一固持單元本體的另一端部固定連接于所述第一連接件,所述第一夾緊部自所述第一固持單元本體的一個端部向下凸出預設長度,所述第一夾緊部用以壓緊所述圓杯;所述第二固持單元包括第二固持單元本體、第二夾緊部,所述第二夾緊部固定連接于所述第二固持單元的一個端部,所述第二固持單元本體的另一端部固定連接于所述第二連接件,所述第二夾緊部自所述第二固持單元本體的一個端部向下凸出預設長度,所述第二夾緊部用以壓緊所述圓杯。
7.根據權利要求6所述的杯把手焊接機,其特征在于,所述圓杯固持機構還包括固定安裝底板,所述x方向滑動軌道、所述固持模具均固定安裝在所述固定安裝底板上;所述后退氣缸的一端固定連接于所述固定安裝底板上,所述后退氣缸的另一端上具有有伸縮桿,所述伸縮桿和所述支撐底板固定連接,以此使得所述后退氣缸驅動所述伸縮桿帶動所述支撐底板移動。
8.根據權利要求7所述的杯把手焊接機,其特征在于,所述圓杯固持機構還包括旋轉驅動電機、減速機、固定連接圓盤,所述旋轉驅動電機和所述減速機連接,所述減速機具有轉動軸,所述轉動軸和所述固定連接圓盤固定連接,所述固定連接圓盤又和所述固定安裝底板固定安裝在一起,以此使得所述旋轉驅動電機帶動所述轉動軸轉動,從而帶動所述固定安裝底板旋轉。
9.根據權利要求8所述的杯把手焊接機,其特征在于,所述固持模具包括固持底板、第一夾持板、第二夾持板、第三夾持板,所述第一夾持板、所述第二夾持板和所述第三夾持板均固定連接于所述固持底板,所述第二夾持板和所述第一夾持板的一端固定連接,所述第三夾持板和所述第一夾持板的另一端固定連接;所述固持底板、所述第一夾持板、所述第二夾持板和所述第三夾持板共同圍合成一夾持腔,所述夾持腔用以夾持所述圓杯。
10.根據權利要求9所述的杯把手焊接機,其特征在于,還包括三軸電動模組、連接架、焊槍旋轉電機、支撐平臺,所述連接架的一端固定連接于所述三軸電動模組、所述焊槍旋轉電機安裝在所述連接架的另一端,所述焊槍旋轉電機和所述焊槍連接,以此使得所述焊槍旋轉電機帶動所述焊槍旋轉;所述三軸電動模組帶動所述連接架在x方向、y方向和z方向上移動,從而帶動所述焊槍在x方向、y方向和z方向上移動;x方向、y方向、z方向兩兩垂直;所述三軸電動模組和所述圓杯固持機構均固定安裝在所述支撐平臺上。
技術總結
本技術涉及一種杯把手焊接機,包括:焊槍;圓杯固持機構,所述圓杯固持機構包括固持模具、第一驅動氣缸、第二驅動氣缸、第一固持單元、第二固持單元,所述固持模具用以安放待焊接的圓杯,所述第一固持單元固定連接于所述第一驅動氣缸,所述第二固持單元固定連接于所述第二驅動氣缸,所述第一驅動氣缸驅動所述第一固持單元移動,所述第二驅動氣缸驅動所述第二固持單元移動,所述第一固持單元和所述第二固持單元用以將所述圓杯抵壓住,以此使得所述圓杯被牢牢固定在所述固持模具上。從而實現焊接性能好,并兼具工作效率高的優點。
技術研發人員:陸春強,費小冬
受保護的技術使用者:蘇州鐳拓激光科技有限公司
技術研發日:20240627
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!