一種利用差動轉(zhuǎn)向的車輛彎道自適應(yīng)巡航穩(wěn)定性控制方法
本發(fā)明涉及車輛控制,尤其是涉及一種利用差動轉(zhuǎn)向的車輛彎道自適應(yīng)巡航穩(wěn)定性控制方法。
背景技術(shù):
1、隨著汽車數(shù)量的迅猛增加,道路安全問題已然變得愈發(fā)嚴(yán)重。先進(jìn)的acc(adaptive?cruise?control,自適應(yīng)巡航控制)系統(tǒng)作為一種高級輔助駕駛系統(tǒng),在提升行車安全性方面發(fā)揮著重要作用。它能夠根據(jù)前后兩車的行駛狀態(tài)以及車間距離,及時、準(zhǔn)確地調(diào)整自車車速,從而始終保持安全的跟車距離。然而,當(dāng)前對于acc系統(tǒng)的研究依舊存在著諸多局限性。
2、首先,在適應(yīng)性方面,該系統(tǒng)對環(huán)境變化的適應(yīng)性較差。目前廣泛采用的控制策略中,各性能指標(biāo)的動態(tài)調(diào)整能力明顯不足。例如,在面對前車突然頻繁變速的復(fù)雜環(huán)境下,acc系統(tǒng)可能無法迅速做出合適的調(diào)整,從而影響行車安全。其次,現(xiàn)有的研究缺乏對行駛經(jīng)濟(jì)性的考慮與分析,這在一定程度上限制了其應(yīng)用價值。此外,從研究工況來看,目前關(guān)于acc系統(tǒng)的研究主要集中在直線道路等幾種典型行駛工況下,對于彎道工況下的多目標(biāo)巡航控制方法研究較少。在實際行車中,當(dāng)前車在彎道中頻繁變速時,自車在跟車過程中的橫向穩(wěn)定性會受到極大影響,行駛路徑也很容易出現(xiàn)偏差。因此,在彎道自適應(yīng)巡航控制方法的設(shè)計中,必須充分考慮多目標(biāo)的協(xié)調(diào)性,既要保證車輛在彎道行駛中的安全跟車距離,又要兼顧車輛的橫向穩(wěn)定性,現(xiàn)有acc系統(tǒng)無法較好地適用于變曲率彎道以及前車頻繁加減速的復(fù)雜工況。
技術(shù)實現(xiàn)思路
1、本發(fā)明的目的就是為了克服上述現(xiàn)有技術(shù)存在的缺陷而提供一種利用差動轉(zhuǎn)向的車輛彎道自適應(yīng)巡航穩(wěn)定性控制方法,能夠改善車輛在彎道跟車過程中的橫向穩(wěn)定性并減少橫向位移偏差。
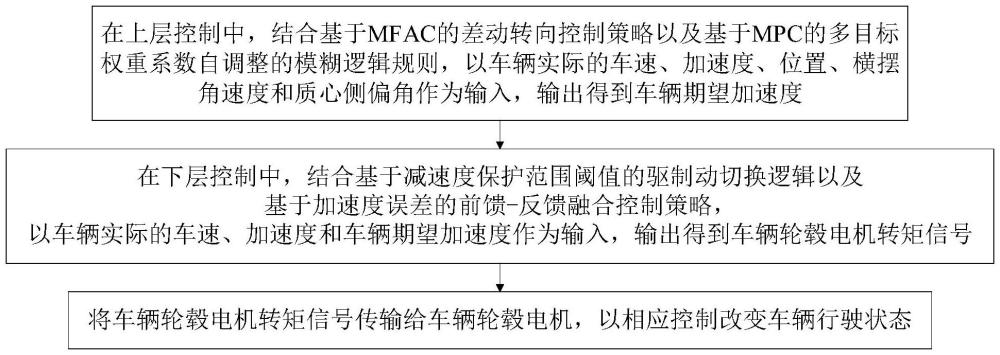
2、本發(fā)明的目的可以通過以下技術(shù)方案來實現(xiàn):一種利用差動轉(zhuǎn)向的車輛彎道自適應(yīng)巡航穩(wěn)定性控制方法,采用包含上層控制和下層控制的分層控制架構(gòu),在上層控制中,結(jié)合基于mfac(model-free?adaptive?control,無模型自適應(yīng)控制)的差動轉(zhuǎn)向控制策略以及基于mpc(model?predictive?control,模型預(yù)測控制)的多目標(biāo)權(quán)重系數(shù)自調(diào)整的模糊邏輯規(guī)則,以車輛實際的車速、加速度、位置、橫擺角速度和質(zhì)心側(cè)偏角作為輸入,輸出得到車輛期望加速度;
3、在下層控制中,結(jié)合基于減速度保護(hù)范圍閾值的驅(qū)制動切換邏輯以及基于加速度誤差的前饋-反饋融合控制策略,以車輛實際的車速、加速度和車輛期望加速度作為輸入,輸出得到車輛輪轂電機轉(zhuǎn)矩信號;
4、將車輛輪轂電機轉(zhuǎn)矩信號傳輸給車輛輪轂電機,以相應(yīng)控制改變車輛行駛狀態(tài)。
5、進(jìn)一步地,所述基于mfac的差動轉(zhuǎn)向控制策略采用兩輸入-兩輸出的非線性離散時間系統(tǒng),輸入量為車輛實際的車速、橫擺角速度和質(zhì)心側(cè)偏角,輸出量為左右兩前輪的驅(qū)動力矩。
6、進(jìn)一步地,所述基于mfac的差動轉(zhuǎn)向控制策略具體為:
7、pf(k+1)=ff(mf(k),mf(k-1),…,mf(k-ni),pf(k),pf(k-1),…,pf(k-n0))
8、其中,mf(k)=[tfl,tfr]t∈r2×1為汽車的控制輸入矢量,pf(k)=[eβ(k)?eω(k)]t∈r2×1為車輛穩(wěn)定性輸出矢量,ff(k)∈r2×1為未知的非線性函數(shù)向量,ni,n0∈z為兩個整數(shù),z為整數(shù)集,分別表示系統(tǒng)的輸入和輸出信號序列的長度。
9、進(jìn)一步地,所述基于mpc的多目標(biāo)權(quán)重系數(shù)自調(diào)整的模糊邏輯規(guī)則具體是根據(jù)車間縱向運動學(xué)模型,在mpc框架下設(shè)定目標(biāo)函數(shù)、性能指標(biāo)及約束,通過優(yōu)化計算得到控制時域內(nèi)的期望加速度,并設(shè)計模糊邏輯規(guī)則實時更新性能指標(biāo)的權(quán)重系數(shù),以滿足復(fù)雜多變的行駛工況。
10、進(jìn)一步地,所述性能指標(biāo)包括安全性、跟車性、經(jīng)濟(jì)性和舒適性。
11、進(jìn)一步地,所述目標(biāo)函數(shù)具體為:
12、
13、其中,u為控制變量集、包括各控制變量及其權(quán)重系數(shù),所述控制變量包括相對車速、車間距誤差、自車加速度、自車加速度變化率,lf為車輛跟隨性和安全性的權(quán)重系數(shù),lc為車輛的舒適性和經(jīng)濟(jì)性的權(quán)重系數(shù),qδd為車間距誤差的權(quán)重因子,則分別表示兩車的相對車速、自車加速度和加速度變化率的權(quán)重因子,ε為向量松弛因子,ah為約束條件的系數(shù)矩陣,bh為約束條件的常數(shù)項矩陣。
14、進(jìn)一步地,所述模糊邏輯規(guī)則具體為:
15、當(dāng)車間距離誤差δd<0時,自車容易與前車發(fā)生碰撞事故,此時車間距離誤差的權(quán)重系數(shù)qδd應(yīng)迅速增加,首先保證車輛的安全;
16、隨著車間距離誤差δd的增加,自車的碰撞風(fēng)險會逐漸解除,此時減小車間距離誤差的權(quán)重系數(shù)qδd,當(dāng)車間距離增加至超過預(yù)設(shè)閾值時,對車間距離進(jìn)行控制,防止車間距離繼續(xù)增大,出現(xiàn)相鄰車道車輛隨意切入的情況;
17、當(dāng)相對車速vrel<0時,表示自車車速大于前車車速,如果此時車間距離誤差δd<0,則控制自車進(jìn)行急減速;
18、如果相對車速vrel<0的同時車間距離誤差δd>0,則控制自車緩慢減速以改善行駛經(jīng)濟(jì)性;
19、當(dāng)自車處于危險狀態(tài)時,控制迅速減小自車加速度的權(quán)重系數(shù)保證自車可以快速響應(yīng),反之,當(dāng)自車處于安全狀態(tài)時,則增加自車加速度的權(quán)重系數(shù)控制自車緩慢地加速或者減速以改善行駛經(jīng)濟(jì)性。
20、進(jìn)一步地,所述基于減速度保護(hù)范圍閾值的驅(qū)制動切換邏輯中,減速度保護(hù)范圍閾值為0.1m/s2,當(dāng)自車期望減速度ades≥a+0.1時,為驅(qū)動控制;
21、當(dāng)自車期望減速度ades≤a-0.1時,為制動控制;
22、當(dāng)a-0.1<ades<a+0.1時,車輛保持現(xiàn)有狀態(tài),不進(jìn)行驅(qū)動/制動的切換;
23、其中,a為基準(zhǔn)減速度。
24、進(jìn)一步地,所述基于加速度誤差的前饋-反饋融合控制策略的具體控制過程為:
25、將由驅(qū)動系統(tǒng)的逆動力學(xué)模型得到的期望驅(qū)動力矩tmotor_des作為前饋量,為消除在建模時前饋量產(chǎn)生的建模誤差對控制系統(tǒng)的影響,利用期望加速度ades和實際加速度aact之間的誤差進(jìn)行反饋調(diào)節(jié),將得到的驅(qū)動力矩tmotor_ref作為反饋量,即為最終期望驅(qū)動力矩;
26、將由制動系統(tǒng)的逆動力學(xué)模型得到的期望制動壓力pm_des作為前饋量,為消除在建模時前饋量產(chǎn)生的建模誤差對控制系統(tǒng)的影響,利用期望減速度ades和實際減速度aact之間的誤差進(jìn)行反饋調(diào)節(jié),將得到的制動壓力pm_ref作為反饋量,即為最終期望制動壓力。
27、進(jìn)一步地,所述驅(qū)動力矩tmotor_ref具體為:
28、
29、
30、其中,tmotor_ref為調(diào)整后的期望驅(qū)動力矩,ktp和kti分別為驅(qū)動反饋pi控制器的比例參數(shù)和積分參數(shù);
31、所述制動壓力pm_ref具體為:
32、pm_ref=pm_des+kpp[ades(n)-aact(n)]+kpi∑[ades(n)-aact(n)]
33、
34、其中,pm_ref為調(diào)整后的期望制動壓力,kpp和kpi分別為制動反饋pi控制器的比例參數(shù)和積分參數(shù)。
35、與現(xiàn)有技術(shù)相比,本發(fā)明具有以下優(yōu)點:
36、本發(fā)明基于分層控制架構(gòu),在上層控制中,提出一種基于mfac的差動轉(zhuǎn)向控制方法,并設(shè)計了基于mpc的多目標(biāo)權(quán)重系數(shù)自調(diào)整的模糊邏輯規(guī)則,用以改善車輛在彎道跟車時的橫向穩(wěn)定性及路徑跟蹤能力,并實時優(yōu)化得到自車行駛的期望加速度;在下層控制中,則提出基于減速度保護(hù)范圍閾值的驅(qū)制動切換邏輯、前饋與反饋融合的控制方法,用以控制車輛穩(wěn)定地完成彎道跟車行駛。由此通過差動轉(zhuǎn)向來改善車輛在彎道跟車過程中的橫向穩(wěn)定性并減少橫向位移偏差。
37、本發(fā)明提出基于mfac的差動轉(zhuǎn)向控制策略,根據(jù)差動轉(zhuǎn)向系統(tǒng)動力學(xué)模型,確定所設(shè)計控制系統(tǒng)的輸入和輸出變量,其中輸入變量為車輛的橫擺角速度、質(zhì)心側(cè)偏角與各自理想值之間的誤差,輸出變量為左右兩前輪的驅(qū)動力矩(存在差動驅(qū)動力矩)。通過驗證表明該基于mfac的差動轉(zhuǎn)向控制策略輸出的跟蹤誤差穩(wěn)態(tài)值最終收斂于0,即表明該基于mfac的差動轉(zhuǎn)向控制策略是穩(wěn)定的,能夠有效改善車輛在彎道跟車時的橫向穩(wěn)定性及路徑跟蹤能力,滿足駕駛員在變曲率彎道中對acc系統(tǒng)的使用需求。
38、本發(fā)明提出基于mpc的多目標(biāo)權(quán)重系數(shù)自調(diào)整的模糊邏輯規(guī)則,在mpc框架下選取合適的性能指標(biāo)(包括安全性、跟車性、經(jīng)濟(jì)性和舒適性)及約束,并在在系統(tǒng)硬約束的基礎(chǔ)上引入了松弛向量,使得性能指標(biāo)的變化范圍進(jìn)一步擴(kuò)大,確保系統(tǒng)不會出現(xiàn)無解的情況,通過優(yōu)化計算得到控制時域內(nèi)的期望加速度,并設(shè)計模糊邏輯規(guī)則實時更新性能指標(biāo)的權(quán)重系數(shù),從而更好地滿足復(fù)雜多變的行駛工況,使得車輛在不同行駛環(huán)境下對跟車性、經(jīng)濟(jì)性、安全性及舒適性的側(cè)重點有所不同,提高acc系統(tǒng)的環(huán)境適應(yīng)性。
39、本發(fā)明設(shè)計0.1m/s2的保護(hù)范圍閾值,用于實現(xiàn)驅(qū)動/制動的切換控制判斷,并且考慮到車輛的非線性會使得在模型建立時產(chǎn)生誤差,設(shè)計前饋與反饋融合控制方法,以獲得準(zhǔn)確的期望驅(qū)動力矩和期望制動壓力,能夠降低驅(qū)制動頻繁切換帶來的不適感,并減少加速度誤差對系統(tǒng)的影響,提高系統(tǒng)的魯棒性。
- 還沒有人留言評論。精彩留言會獲得點贊!