具有高性能減震驅(qū)動(dòng)模塊的智能運(yùn)輸機(jī)器人的制作方法
本技術(shù)涉及運(yùn)輸機(jī)器人領(lǐng)域,具體地說(shuō),尤其涉及一種具有高性能減震驅(qū)動(dòng)模塊的智能運(yùn)輸機(jī)器人。
背景技術(shù):
1、運(yùn)輸機(jī)器人指裝有電磁或光學(xué)等自動(dòng)導(dǎo)引裝置,由計(jì)算機(jī)控制,能夠沿著指定路線行駛的運(yùn)輸機(jī)器人。廣泛運(yùn)用在工程搬運(yùn),倉(cāng)儲(chǔ)物流,智能停車,港口運(yùn)輸?shù)阮I(lǐng)域。具有高性能減震驅(qū)動(dòng)模塊的智能運(yùn)輸機(jī)器人通常設(shè)置有驅(qū)動(dòng)模塊,以驅(qū)動(dòng)具有運(yùn)輸機(jī)器人行進(jìn)。
2、隨著運(yùn)輸機(jī)器人技術(shù)的發(fā)展,及使用場(chǎng)景的精細(xì)化,對(duì)驅(qū)動(dòng)模塊的整體尺寸及產(chǎn)品的可靠性,傳動(dòng)驅(qū)動(dòng)精度提出了更高的要求。但是現(xiàn)有驅(qū)動(dòng)模塊結(jié)構(gòu)復(fù)雜,體積較大,占用空間大,傳動(dòng)精度不高等問(wèn)題的存在,使用場(chǎng)景比較局限。如單輪舵輪加減震架方案驅(qū)動(dòng)模塊,占用輸送機(jī)器人空間大,僅適用于外形尺寸較大的輸送機(jī)器人,適用性差。單輪舵輪驅(qū)動(dòng)模塊在進(jìn)行換向時(shí)輪子與地面之間直接進(jìn)行滑動(dòng)摩擦,損傷地面。在不平的地面上,機(jī)器人行駛時(shí)易產(chǎn)生劇烈振動(dòng),不僅影響所運(yùn)輸物品的安全,還可能損傷機(jī)器自身結(jié)構(gòu),降低使用壽命。傳統(tǒng)的減震措施往往無(wú)法有效平衡減震效果與結(jié)構(gòu)強(qiáng)度,影響整體穩(wěn)定性。目前需要一種新型的運(yùn)輸機(jī)器人,能夠顯著提升其在復(fù)雜環(huán)境下的通過(guò)性、減震性能、轉(zhuǎn)向控制精度以及動(dòng)力系統(tǒng)的效率和維護(hù)便捷性。
技術(shù)實(shí)現(xiàn)思路
1、本實(shí)用新型的目的,在于提供一種具有高性能減震驅(qū)動(dòng)模塊的智能運(yùn)輸機(jī)器人,以解決現(xiàn)有技術(shù)運(yùn)輸機(jī)器人通過(guò)性差,并且減震與穩(wěn)定性差的問(wèn)題。
2、本實(shí)用新型是通過(guò)以下技術(shù)方案實(shí)現(xiàn)的:
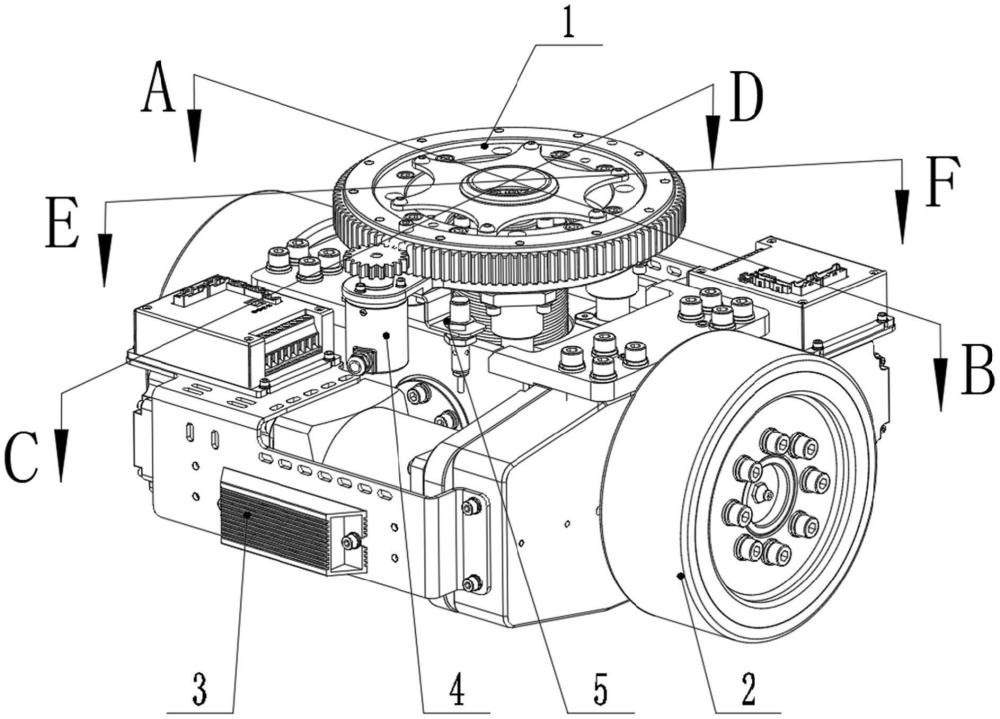
3、一種具有高性能減震驅(qū)動(dòng)模塊的智能運(yùn)輸機(jī)器人,包括驅(qū)動(dòng)模塊,所述驅(qū)動(dòng)模塊包括鉸接減震組件,鉸接減震組件包括安裝支架ⅰ,安裝支架ⅰ上設(shè)有動(dòng)力輪組件,安裝支架ⅰ通過(guò)鉸接軸連接有導(dǎo)向座,鉸接軸上設(shè)有墊片,可通過(guò)墊片調(diào)整其前后方向游隙;所述的動(dòng)力輪組件包括伺服電機(jī),所述的伺服電機(jī)連接有行走輪;導(dǎo)向座通過(guò)彈簧與調(diào)整組件連接,調(diào)整組件包括回轉(zhuǎn)支撐安裝板,回轉(zhuǎn)支撐安裝板上設(shè)有光軸底座和調(diào)整座,光軸底座上固定設(shè)有光軸,光軸底部設(shè)有限位板,導(dǎo)向座與光軸滑動(dòng)連接,彈簧一端連接調(diào)整座,另一端連接導(dǎo)向座。導(dǎo)向座和調(diào)整組件相對(duì)位置發(fā)生變化時(shí),彈簧正壓力也隨之改變,驅(qū)動(dòng)模塊驅(qū)動(dòng)輪對(duì)地面正壓力也隨之變化。
4、進(jìn)一步地,所述回轉(zhuǎn)支撐安裝板包括回轉(zhuǎn)支撐軸承,回轉(zhuǎn)支撐軸承的外圈與內(nèi)圈均可相對(duì)于軸線旋轉(zhuǎn),安裝板上設(shè)有限位塊,回轉(zhuǎn)支撐軸承的內(nèi)圈固定回轉(zhuǎn)支撐安裝板上,回轉(zhuǎn)支撐軸承的外圈與外部運(yùn)輸機(jī)器人連接。
5、進(jìn)一步地,所述的回轉(zhuǎn)支撐安裝板上設(shè)有回轉(zhuǎn)齒輪和編碼器,編碼器上設(shè)有小齒輪,小齒輪與回轉(zhuǎn)齒輪連接;用于反饋驅(qū)動(dòng)模塊轉(zhuǎn)向角度信號(hào)
6、進(jìn)一步地,所述的回轉(zhuǎn)支撐安裝板上設(shè)有安裝支架ⅲ,安裝支架ⅲ上設(shè)有接近開關(guān),接近開關(guān)與限位塊配合,起到驅(qū)動(dòng)模塊軟限位作用。
7、進(jìn)一步地,所述的回轉(zhuǎn)支撐安裝板上設(shè)有護(hù)線圈;驅(qū)動(dòng)模塊地動(dòng)力線線束及信號(hào)線線束從彈簧、調(diào)整座及護(hù)線圈中間穿出。
8、進(jìn)一步地,所述的調(diào)整座通過(guò)調(diào)整螺釘安裝在回轉(zhuǎn)支撐安裝板底部,調(diào)整螺釘可以調(diào)整調(diào)整座沿垂直地面方向上的相對(duì)位置。
9、進(jìn)一步地,所述的伺服電機(jī)與行走輪之間連接有行星減速機(jī),行星減速機(jī)連接有平行齒輪箱,平行齒輪箱連接有行走輪;行星減速機(jī)可以根據(jù)需求替換不同速比。
10、進(jìn)一步地,所述的平行齒輪箱上設(shè)有安裝支架ⅱ,安裝支架ⅱ上設(shè)有電機(jī)驅(qū)動(dòng)器和驅(qū)動(dòng)電阻。
11、進(jìn)一步地,所述的動(dòng)力輪組件數(shù)量為兩個(gè),兩個(gè)所述動(dòng)力輪組件沿安裝支架ⅰ軸線方向成180度對(duì)稱設(shè)置,所述的行走輪的材料采用聚氨酯。
12、進(jìn)一步地,所述的導(dǎo)向座上設(shè)有襯套ⅰ和襯套ⅱ,導(dǎo)向座通過(guò)襯套ⅰ與光軸滑動(dòng)連接;導(dǎo)向座通過(guò)襯套ⅱ與鉸接軸旋轉(zhuǎn)連接。
13、與現(xiàn)有技術(shù)相比,本實(shí)用新型的有益效果是:
14、1.本實(shí)用新型通過(guò)采用鉸接減震組件和導(dǎo)向座與彈簧的連接的方式,使得機(jī)器人能更好地適應(yīng)地面起伏,即使在不平坦的地形中也能保持穩(wěn)定行駛,減少了震動(dòng)對(duì)貨物及機(jī)器人本身的損害。
15、2.本實(shí)用新型采用回轉(zhuǎn)支撐軸承、編碼器和接近開關(guān)配合地方式,實(shí)現(xiàn)了對(duì)運(yùn)輸機(jī)器人行進(jìn)方向的精確控制和角度監(jiān)測(cè),允許運(yùn)輸機(jī)器人在狹小空間內(nèi)精準(zhǔn)轉(zhuǎn)向,提升了操作靈活性和自動(dòng)化程度。
16、3.本實(shí)用新型的動(dòng)力輪組件配置了伺服電機(jī)、行星減速機(jī)和平行齒輪箱,形成了高效的傳動(dòng)系統(tǒng),確保了強(qiáng)大的驅(qū)動(dòng)力和動(dòng)態(tài)負(fù)載均衡,即便在遭遇打滑情況時(shí)也能通過(guò)調(diào)節(jié)彈簧壓力來(lái)恢復(fù)牽引力。
17、4.本實(shí)用新型提升運(yùn)輸機(jī)器人在復(fù)雜環(huán)境中的通過(guò)能力、操作精度、動(dòng)力效率及長(zhǎng)期運(yùn)行的可靠性,解決了傳統(tǒng)運(yùn)輸機(jī)器人在適應(yīng)性、穩(wěn)定性、控制精度和動(dòng)力效率方面的不足。
技術(shù)特征:
1.一種具有高性能減震驅(qū)動(dòng)模塊的智能運(yùn)輸機(jī)器人,包括驅(qū)動(dòng)模塊,其特征在于:所述驅(qū)動(dòng)模塊包括鉸接減震組件(1),鉸接減震組件(1)包括安裝支架ⅰ(11),安裝支架ⅰ(11)上設(shè)有動(dòng)力輪組件(2),安裝支架ⅰ(11)通過(guò)鉸接軸(12)連接有導(dǎo)向座(13);所述的動(dòng)力輪組件(2)包括伺服電機(jī)(21),所述的伺服電機(jī)(21)連接有行走輪(24);導(dǎo)向座(13)通過(guò)彈簧(16)與調(diào)整組件(14)連接,調(diào)整組件(14)包括回轉(zhuǎn)支撐安裝板(141),回轉(zhuǎn)支撐安裝板(141)上設(shè)有光軸底座(142)和調(diào)整座(144),光軸底座(142)上固定設(shè)有光軸(143),光軸(143)底部設(shè)有限位板(146),導(dǎo)向座(13)與光軸(143)滑動(dòng)連接,彈簧(16)一端連接調(diào)整座(144),另一端連接導(dǎo)向座(13)。
2.根據(jù)權(quán)利要求1所述的具有高性能減震驅(qū)動(dòng)模塊的智能運(yùn)輸機(jī)器人,其特征在于:所述回轉(zhuǎn)支撐安裝板(141)包括回轉(zhuǎn)支撐軸承(15),回轉(zhuǎn)支撐軸承(15)的外圈與內(nèi)圈均可相對(duì)于軸線旋轉(zhuǎn),安裝板上設(shè)有限位塊(151),回轉(zhuǎn)支撐軸承(15)的內(nèi)圈固定回轉(zhuǎn)支撐安裝板(141)上,回轉(zhuǎn)支撐軸承(15)的外圈與外部運(yùn)輸機(jī)器人連接。
3.根據(jù)權(quán)利要求2所述的具有高性能減震驅(qū)動(dòng)模塊的智能運(yùn)輸機(jī)器人,其特征在于:所述的回轉(zhuǎn)支撐安裝板(141)上設(shè)有回轉(zhuǎn)齒輪和編碼器(42),編碼器(42)上設(shè)有小齒輪(41),小齒輪(41)與回轉(zhuǎn)齒輪連接。
4.根據(jù)權(quán)利要求2所述的具有高性能減震驅(qū)動(dòng)模塊的智能運(yùn)輸機(jī)器人,其特征在于:所述的回轉(zhuǎn)支撐安裝板(141)上設(shè)有安裝支架ⅲ(51),安裝支架ⅲ(51)上設(shè)有接近開關(guān)(52),接近開關(guān)(52)與限位塊(151)配合。
5.根據(jù)權(quán)利要求2所述的具有高性能減震驅(qū)動(dòng)模塊的智能運(yùn)輸機(jī)器人,其特征在于:所述的回轉(zhuǎn)支撐安裝板(141)上設(shè)有護(hù)線圈(152)。
6.根據(jù)權(quán)利要求1所述的具有高性能減震驅(qū)動(dòng)模塊的智能運(yùn)輸機(jī)器人,其特征在于:所述的調(diào)整座(144)通過(guò)調(diào)整螺釘(147)安裝在回轉(zhuǎn)支撐安裝板(141)底部。
7.根據(jù)權(quán)利要求1所述的具有高性能減震驅(qū)動(dòng)模塊的智能運(yùn)輸機(jī)器人,其特征在于:所述的伺服電機(jī)(21)與行走輪(24)之間連接有行星減速機(jī)(22),行星減速機(jī)(22)連接有平行齒輪箱(23),平行齒輪箱(23)連接有行走輪(24)。
8.根據(jù)權(quán)利要求7所述的具有高性能減震驅(qū)動(dòng)模塊的智能運(yùn)輸機(jī)器人,其特征在于:所述的平行齒輪箱(23)上設(shè)有安裝支架ⅱ(33),安裝支架ⅱ(33)上設(shè)有電機(jī)驅(qū)動(dòng)器(31)和驅(qū)動(dòng)電阻(32)。
9.根據(jù)權(quán)利要求7所述的具有高性能減震驅(qū)動(dòng)模塊的智能運(yùn)輸機(jī)器人,其特征在于:所述的動(dòng)力輪組件(2)數(shù)量為兩個(gè),兩個(gè)所述動(dòng)力輪組件(2)沿安裝支架ⅰ(11)軸線方向成180度對(duì)稱設(shè)置,所述的行走輪(24)的材料采用聚氨酯。
10.根據(jù)權(quán)利要求1所述的具有高性能減震驅(qū)動(dòng)模塊的智能運(yùn)輸機(jī)器人,其特征在于:所述的導(dǎo)向座(13)上設(shè)有襯套ⅰ(132)和襯套ⅱ(134),導(dǎo)向座(13)通過(guò)襯套ⅰ(132)與光軸(143)滑動(dòng)連接;導(dǎo)向座(13)通過(guò)襯套ⅱ(134)與鉸接軸(12)旋轉(zhuǎn)連接。
技術(shù)總結(jié)
本技術(shù)公開了一種具有高性能減震驅(qū)動(dòng)模塊的智能運(yùn)輸機(jī)器人,它屬于運(yùn)輸機(jī)器人領(lǐng)域,其解決現(xiàn)有技術(shù)運(yùn)輸機(jī)器人通過(guò)性差,并且減震與穩(wěn)定性差的問(wèn)題。它主要包括驅(qū)動(dòng)模塊,所述驅(qū)動(dòng)模塊包括鉸接減震組件,鉸接減震組件上設(shè)有動(dòng)力輪組件,安裝支架Ⅰ通過(guò)鉸接軸連接有導(dǎo)向座;導(dǎo)向座通過(guò)彈簧與調(diào)整組件連接,調(diào)整組件包括回轉(zhuǎn)支撐安裝板,回轉(zhuǎn)支撐安裝板上設(shè)有光軸底座和調(diào)整座,光軸底座上固定設(shè)有光軸,光軸底部設(shè)有限位板,導(dǎo)向座與光軸滑動(dòng)連接。本技術(shù)通過(guò)采用鉸接減震組件和導(dǎo)向座與彈簧的連接,使得機(jī)器人能更好地適應(yīng)地面起伏,即使在不平坦的地形中也能保持穩(wěn)定行駛,減少了震動(dòng)對(duì)機(jī)器人本身的損害。
技術(shù)研發(fā)人員:張鵬程,毛玉喜,田洪云,劉金尚
受保護(hù)的技術(shù)使用者:臨沂臨工智能信息科技有限公司
技術(shù)研發(fā)日:20240627
技術(shù)公布日:2025/4/28
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!