確定變道風險的方法、裝置及存儲介質與流程
本申請實施例涉及車輛控制,特別涉及一種確定變道風險的方法、裝置及存儲介質。
背景技術:
1、在車輛駕駛過程中,無論是駕駛員手動變道還是智能駕駛系統自動變道前,都需要進行變道風險判斷,用于確定變道的安全性,避免與其余車輛發生碰撞。相關技術中,只考慮自車與目標車道的車輛的碰撞風險,未考慮自車與當前車道的車輛的碰撞風險,對變道風險的判斷不夠全面;并且在多種情況下均以固定的距離閾值和固定的時距閾值判斷是否存在碰撞風險,靈活性差,不能適應動態變化較大的道路場景;通過時間回滯的方式延遲變道決策的執行,容易錯失變道時機,同時在存在碰撞風險的場景下時間回滯容易導致變道退回滯后,增加了變道過程中的碰撞風險。因此,如何在全面考慮碰撞風險的情況下,靈活并且及時地進行變道風險判斷,對保證變道的安全性以及提高變道執行的成功率很重要。
技術實現思路
1、本申請實施例提供了一種確定變道風險的方法、裝置及存儲介質,可用于保證變道的安全性以及提高變道執行的成功率。所述技術方案如下:
2、一方面,本申請實施例提供了一種確定變道風險的方法,所述方法包括:
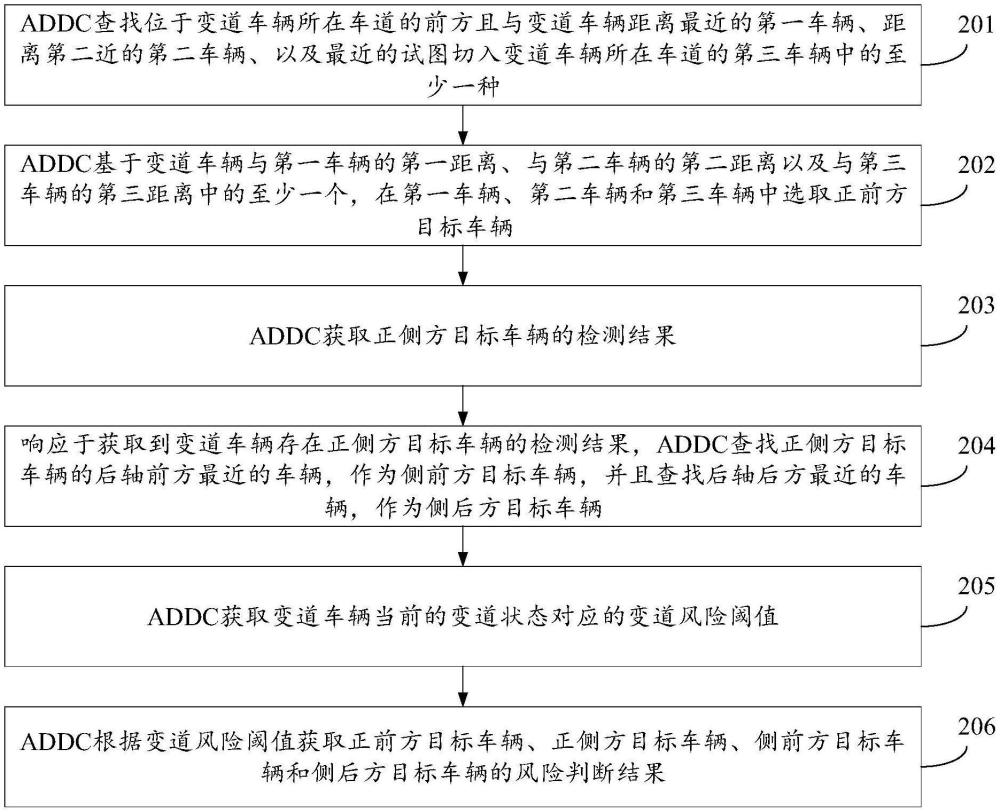
3、查找位于變道車輛所在車道的前方且與所述變道車輛距離最近的第一車輛、距離第二近的第二車輛,以及最近的試圖切入所述變道車輛所在車道的第三車輛;
4、基于所述變道車輛與所述第一車輛的第一距離、與所述第二車輛的第二距離以及與所述第三車輛的第三距離中的至少一個,在所述第一車輛、所述第二車輛和所述第三車輛中選取正前方目標車輛;
5、獲取正側方目標車輛的檢測結果,所述正側方目標車輛的檢測結果用于指示所述變道車輛是否存在正側方目標車輛,所述正側方目標車輛為與所述變道車輛在目標車道的投影所在區域的長度存在重疊的車輛;
6、響應于獲取到所述變道車輛存在所述正側方目標車輛的檢測結果,查找所述正側方目標車輛的后軸前方最近的車輛,作為側前方目標車輛,并且查找所述后軸后方最近的車輛,作為側后方目標車輛;
7、獲取所述變道車輛當前的變道狀態對應的變道風險閾值;
8、根據所述變道風險閾值獲取所述正前方目標車輛、所述正側方目標車輛、側前方目標車輛和側后方目標車輛的風險判斷結果,所述風險判斷結果用于指示所述變道車輛變道時對應的車輛是否導致風險。
9、另一方面,提供了一種確定變道風險的裝置,所述裝置包括:
10、第一查找模塊,用于查找位于變道車輛所在車道的前方且與所述變道車輛距離最近的第一車輛、距離第二近的第二車輛,以及最近的試圖切入所述變道車輛所在車道的第三車輛;
11、選取模塊,用于基于所述變道車輛與所述第一車輛的第一距離、與所述第二車輛的第二距離以及與所述第三車輛的第三距離中的至少一個,在所述第一車輛、所述第二車輛和所述第三車輛中選取正前方目標車輛;
12、第一獲取模塊,用于獲取正側方目標車輛的檢測結果,所述正側方目標車輛的檢測結果用于指示所述變道車輛是否存在正側方目標車輛,所述正側方目標車輛為與所述變道車輛在目標車道的投影所在區域的長度存在重疊的車輛;
13、第二查找模塊,用于響應于獲取到所述變道車輛存在所述正側方目標車輛的檢測結果,查找所述正側方目標車輛的后軸前方最近的車輛,作為側前方目標車輛,并且查找所述后軸后方最近的車輛,作為側后方目標車輛;
14、第二獲取模塊,用于獲取所述變道車輛當前的變道狀態對應的變道風險閾值;
15、第三獲取模塊,用于根據所述變道風險閾值獲取所述正前方目標車輛、所述正側方目標車輛、側前方目標車輛和側后方目標車輛的風險判斷結果,所述風險判斷結果用于指示所述變道車輛變道時對應的車輛是否導致風險。
16、另一方面,還提供了一種非臨時性計算機可讀存儲介質,其特征在于,所述計算機可讀存儲介質中存儲有計算機程序,所述計算機程序由處理器加載并執行,以實現上述任一所述的確定變道風險的方法。
17、另一方面,還提供了一種計算機程序產品,所述計算機程序產品包括計算機指令,所述計算機指令被處理器執行時實現上述任一所述的確定變道風險的方法的步驟。
18、本申請提供的技術方案至少帶來如下有益效果:
19、本申請通過查找位于變道車輛所在車道的前方且與變道車輛距離最近的第一車輛、距離第二近的第二車輛、以及最近的試圖切入變道車輛所在車道的第三車輛,在第一車輛、第二車輛和第三車輛中選取正前方目標車輛;再通過獲取正側方目標車輛的檢測結果,判斷是否存在正側方目標車輛;在存在正側方目標車輛的情況下,根據正側方目標車輛查找側前方目標車輛和側后方目標車輛;再通過獲取變道車輛當前的變道狀態對應的變道風險閾值,根據變道風險閾值對正前方目標車輛、正側方目標車輛、側前方目標車輛和側后方目標車輛進行風險判斷,實現在全面考慮碰撞風險的情況下,靈活并且及時地進行變道風險判斷,從而保證變道的安全性并且提高變道執行的成功率。
技術特征:
1.一種確定變道風險的方法,其特征在于,所述方法包括:
2.根據權利要求1所述的方法,其特征在于,所述基于所述變道車輛與所述第一車輛的第一距離、與所述第二車輛的第二距離以及與所述第三車輛的第三距離中的至少一個,在所述第一車輛、所述第二車輛和所述第三車輛中選取正前方目標車輛,包括:
3.根據權利要求1所述的方法,其特征在于,所述獲取正側方目標車輛的檢測結果之后,還包括:
4.根據權利要求1所述的方法,其特征在于,所述獲取所述變道車輛當前的變道狀態對應的變道風險閾值,包括:
5.根據權利要求1所述的方法,其特征在于,所述變道風險閾值包括間距閾值、時距閾值和時長閾值,根據所述變道風險閾值獲取所述正前方目標車輛、側前方目標車輛和側后方目標車輛的風險判斷結果,包括:
6.根據權利要求5所述的方法,其特征在于,所述變道風險閾值包括時長閾值,所述根據所述變道風險閾值對所述正側方目標車輛、側前方目標車輛和側后方目標車輛進行風險判斷,包括:
7.根據權利要求1所述的方法,其特征在于,根據所述變道風險閾值對所述正側方目標車輛進行風險判斷,包括:
8.一種確定變道風險的裝置,其特征在于,所述裝置包括:
9.一種計算機程序產品,所述計算機程序產品包括計算機指令,所述計算機指令被處理器執行時實現如權利要求1至7任一所述的確定變道風險的方法的步驟。
10.一種非臨時性計算機可讀存儲介質,其特征在于,所述計算機可讀存儲介質中存儲有計算機程序,所述計算機程序由處理器加載并執行,以實現如權利要求1至7任一所述的確定變道風險的方法。
技術總結
本申請公開了確定變道風險的方法、裝置及存儲介質,屬于車輛控制技術領域。方法包括:查找位于變道車輛所在車道的前方且與變道車輛距離最近的第一車輛、距離第二近的第二車輛,以及最近的試圖切入變道車輛所在車道的第三車輛;在第一車輛、第二車輛和第三車輛中選取正前方目標車輛;響應于獲取到變道車輛存在正側方目標車輛的檢測結果,查找正側方目標車輛的后軸前方最近的車輛,作為側前方目標車輛,且查找后軸后方最近的車輛,作為側后方目標車輛;獲取變道車輛當前的變道狀態對應的變道風險閾值;根據變道風險閾值獲取正前方目標車輛、正側方目標車輛、側前方目標車輛和側后方目標車輛的風險判斷結果。實現靈活并且及時地進行變道風險判斷。
技術研發人員:賈瑞明,陳遠龍,隋記魁,魏強,羅鳳梅,李超群,李勇,朱靜靜
受保護的技術使用者:大卓智能科技有限公司
技術研發日:
技術公布日:2025/3/16
- 還沒有人留言評論。精彩留言會獲得點贊!