一種光伏清掃機自行走系統及控制方法與流程
本發明涉及光伏清掃機,尤其涉及一種光伏清掃機自行走系統及控制方法。
背景技術:
1、隨著光伏產業的快速發展,光伏板的應用越來越廣泛。然而,積累的灰塵和污垢覆蓋在光伏板表面,阻擋了部分太陽光的直接照射,導致光伏板接收到的光強減弱,由于光伏板的發電效率與其接收到的光強成正比,因此光強的減弱會直接導致發電效率的下降。因此,需要對光伏板表面進行清掃,而傳統依賴人工手動清掃,費時費力。
2、現有公告號cn208555134u公開了一種光伏板清掃機,包括車架、駕駛室、大臂、清掃架,車架下端設置有車輪,車架內部設置有油箱,車架上端設置有駕駛室,駕駛室一側設置有動力殼體,動力殼體內部設置有油泵,油泵一側設置有發動機,駕駛室內部設置有控制臺,控制臺內部設置有控制器,控制器下端設置有處理器。做了六輪驅動,極大地增強了穩定性,前方把挖掘機斗去掉,換成3.5米左右的刷子,可旋轉180度,左右作業,然后上下調節刷子作業,向下有限位機構,防止刷子過低損傷光伏板,實現機械清掃,省時省力。
3、但是,上述光伏板清掃機體積龐大,還需要人工在駕駛室進行操控,而人工成本高昂,且效率較低。
技術實現思路
1、本發明的目的在于提供一種光伏清掃機自行走系統及控制方法,解決了現有的光伏板清掃機體積龐大,還需要人工在駕駛室進行操控,而人工成本高昂,且效率較低的問題。
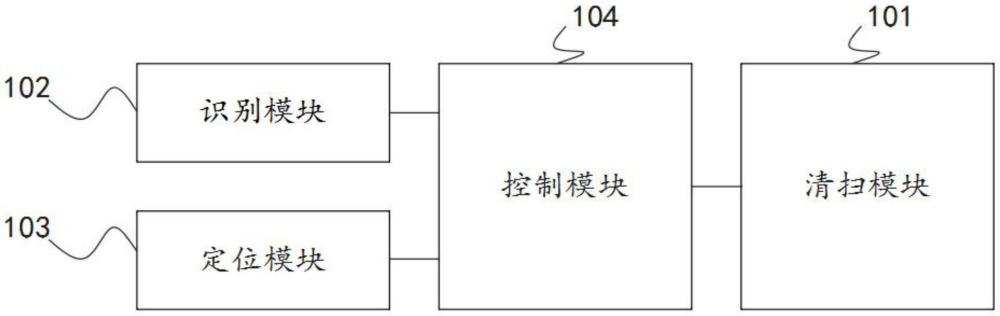
2、為實現上述目的,本發明提供了一種光伏清掃機自行走系統,包括清掃模塊,還包括識別模塊、定位模塊和控制模塊,所述識別模塊與所述控制模塊連接,所述定位模塊與所述控制模塊連接,所述控制模塊與所述清掃模塊連接;
3、所述識別模塊,用于采集光伏板區域的圖像,并對采集的圖像進行處理,識別光伏板的位置和排列方式,并將識別數據上傳至所述控制模塊;
4、所述定位模塊,用于實時獲取光伏清掃機的位置、速度和姿態信息,并進行光伏清掃機的自主導航和路徑規劃,以及將規劃數據上傳至所述控制模塊;
5、所述控制模塊,根據所述識別數據和所述規劃數據生成清掃策略,并根據所述清掃策略控制所述清掃模塊的運行;
6、所述清掃模塊,用于對光伏板進行清掃。
7、其中,所述識別模塊包括采集單元和處理單元,所述采集單元與所述處理單元連接,所述處理單元與所述控制模塊連接;
8、所述采集單元,用于通過攝像頭拍攝光伏板區域的圖像,并將拍攝圖像上傳至所述處理單元;
9、所述處理單元,用于對圖像進行預處理和特征提取,識別光伏板的位置和排列方式。
10、其中,所述處理單元包括預處理子單元、特征提取子單元和識別子單元,所述預處理子單元與所述采集單元連接,所述特征提取子單元與所述預處理子單元連接,所述識別子單元分別與所述特征提取子單元和所述控制模塊連接;
11、所述預處理子單元,用于將彩色圖像轉換為灰度圖像,并應用濾波技術去除圖像中的噪聲,使用圖像增強技術改善圖像的視覺效果;
12、所述特征提取子單元,用于使用邊緣檢測算法檢測預處理后的圖像中的邊緣信息,并提取光伏板邊緣;
13、所述識別子單元,用于根據提取到的光伏板邊緣信息,確定光伏板在圖像中的具體位置,分析多個光伏板的位置信息,識別出它們之間的相對位置和排列方式。
14、其中,所述定位模塊包括測量單元和導航單元,所述測量單元與所述導航單元連接,所述導航單元與所述控制模塊連接;
15、所述測量單元,用于配備高精度衛星定位技術和慣性測量單元,實時獲取光伏清掃機的位置、速度和姿態信息;
16、所述導航單元,用于結合地圖數據,實現光伏清掃機的自主導航和路徑規劃。
17、其中,所述清掃模塊包括行走單元和清潔單元,所述行走單元與所述控制模塊連接;所述清掃單元與所述控制模塊連接;
18、所述行走單元,用于接收所述控制模塊的指令,實現光伏清掃機的自主移動;
19、所述清潔單元,用于接收所述控制模塊的指令,對光伏板進行清掃。
20、其中,所述行走單元包括機器人本體、驅動電機和減速器,所述驅動電機與所述控制模塊連接,并位于所述機器人本體的內部;所述減速器與所述驅動電機連接,并位于所述機器人本體的內部。
21、其中,所述行走單元還包括驅動輪和履帶,所述減速器與所述驅動輪連接,所述驅動輪的數量為多個,多個所述驅動輪分別兩兩相對位于所述機器人本體的兩側;同一側的所述驅動輪上連接有一個所述履帶。
22、一種光伏清掃機自行走控制方法,包括以下步驟:
23、通過識別模塊采集光伏板區域的圖像,并對采集的圖像進行處理,識別光伏板的位置和排列方式,并將識別數據上傳至控制模塊;
24、通過定位模塊實時獲取光伏清掃機的位置、速度和姿態信息,并進行光伏清掃機的自主導航和路徑規劃,以及將規劃數據上傳至所述控制模塊;
25、所述控制模塊根據獲取的所述識別數據和所述規劃數據生成清掃策略,并根據所述清掃策略控制清掃模塊的運行;
26、所述清掃模塊接收所述控制模塊的指令,對光伏板進行清掃。
27、本發明的一種光伏清掃機自行走系統及控制方法,通過所述識別模塊采集光伏板區域的圖像,并進行處理,識別光伏板的位置和排列方式,通過所述定位模塊實時獲取光伏清掃機的位置、速度和姿態信息,并進行光伏清掃機的自主導航和路徑規劃,所述控制模塊根據獲取的所述識別數據和所述規劃數據生成清掃策略,所述清掃模塊接收所述控制模塊的清掃策略指令,對光伏板進行清掃。至此,實現自動行走并進行自動清掃,無需人工,節約人工成本,且機械清掃效率更高。
技術特征:
1.一種光伏清掃機自行走系統,包括清掃模塊,其特征在于,
2.如權利要求1所述的光伏清掃機自行走系統,其特征在于,
3.如權利要求2所述的光伏清掃機自行走系統,其特征在于,
4.如權利要求1所述的光伏清掃機自行走系統,其特征在于,
5.如權利要求1所述的光伏清掃機自行走系統,其特征在于,
6.如權利要求5所述的光伏清掃機自行走系統,其特征在于,
7.如權利要求6所述的光伏清掃機自行走系統,其特征在于,
8.一種光伏清掃機自行走控制方法,適用于如權利要求1所述的光伏清掃機自行走系統,其特征在于,包括以下步驟:
技術總結
本發明涉及光伏清掃機技術領域,具體涉及一種光伏清掃機自行走系統及控制方法,包括清掃模塊、識別模塊、定位模塊和控制模塊,識別模塊與控制模塊連接,定位模塊與控制模塊連接,控制模塊與清掃模塊連接;通過識別模塊采集光伏板區域的圖像,并進行處理,識別光伏板的位置和排列方式,通過定位模塊實時獲取光伏清掃機的位置、速度和姿態信息,并進行光伏清掃機的自主導航和路徑規劃,控制模塊根據獲取的識別數據和規劃數據生成清掃策略,清掃模塊接收控制模塊的清掃策略指令,對光伏板進行清掃。至此,實現自動行走并進行自動清掃,無需人工,節約人工成本,且機械清掃效率更高。
技術研發人員:羅浩,王岳,曾帥
受保護的技術使用者:重慶聚光新材料科技股份有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!