一種智能汽車的車輛側翻預警方法及系統
本發明屬于車輛控制,尤其涉及一種智能汽車的車輛側翻預警方法及系統。
背景技術:
1、車輛側翻預警系統是一種先進的主動安全技術,旨在預防車輛在急轉彎或緊急避讓情況下發生側翻事故。該系統通過監測車輛的動態參數,如速度、橫向加速度、轉向角度及車身傾斜角度等,實時評估側翻風險。一旦檢測到可能發生側翻的情況,系統會立即向駕駛員發出警報,提醒其采取措施以避免潛在危險。部分高級系統還能與車輛的穩定控制系統協同工作,自動調整車輛狀態,進一步降低側翻風險,從而有效提升行車安全性,保護駕乘人員的生命安全。
2、在當前的側翻預警過程中,主要依賴于監測車輛的動態參數進行側翻預警,上述參數都是基于車輛的出廠參數確定的,車輛在實際的使用過程中,內部的人員以及物品會改變車輛的重心位置以及整車質量,如果仍以出廠參數進行預警,容易出現漏報或者誤報的情況。
技術實現思路
1、本發明的目的在于提供一種智能汽車的車輛側翻預警方法,旨在解決以出廠參數進行預警,容易出現漏報或者誤報的情況的問題。
2、本發明是這樣實現的,一種智能汽車的車輛側翻預警方法,所述方法包括:
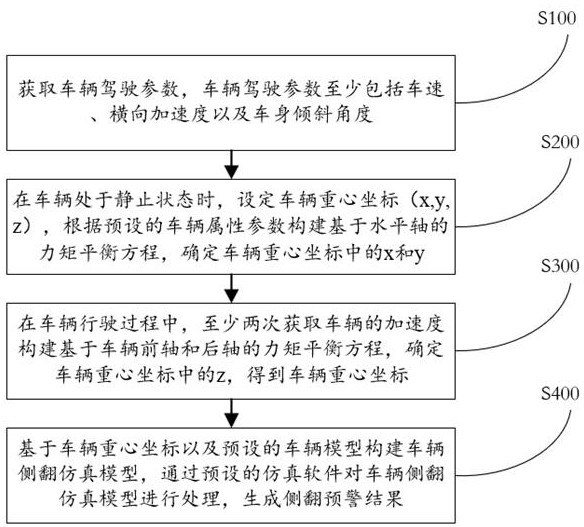
3、獲取車輛駕駛參數,車輛駕駛參數至少包括車速、橫向加速度以及車身傾斜角度;
4、在車輛處于靜止狀態時,設定車輛重心坐標(x,y,z),根據預設的車輛屬性參數構建基于水平軸的力矩平衡方程,確定車輛重心坐標中的x和y;
5、在車輛行駛過程中,至少兩次獲取車輛的加速度構建基于車輛前軸和后軸的力矩平衡方程,確定車輛重心坐標中的z,得到車輛重心坐標;
6、基于車輛重心坐標以及預設的車輛模型構建車輛側翻仿真模型,通過預設的仿真軟件對車輛側翻仿真模型進行處理,生成側翻預警結果。
7、優選的,所述在車輛處于靜止狀態時,設定車輛重心坐標(x,y,z),根據預設的車輛屬性參數構建基于水平軸的力矩平衡方程,確定車輛重心坐標中的x和y的步驟,具體包括:
8、在車輛啟動后尚處于靜止狀態時,同步獲取各個車輪對應的支持力,基于車輛的支持力計算得到車輛的總重量;
9、根據車輪上的支持力以及車輛屬性參數中的長度數據構建基于x軸的力矩平衡方程,求解得到車輛重心坐標的y坐標的數值;
10、根據車輪上的支持力以及車輛屬性參數中的寬度數據構建基于y軸的力矩平衡方程,求解得到車輛重心坐標的x坐標的數值。
11、優選的,所述在車輛行駛過程中,至少兩次獲取車輛的加速度構建基于車輛前軸和后軸的力矩平衡方程,確定車輛重心坐標中的z,得到車輛重心坐標的步驟,具體包括:
12、在車輛行駛加速時,對實時加速度進行判定,實時加速度達到第一預設值時,獲取各個車輪上的支持力,構建基于前軸的力矩平衡方程;
13、在車輛行駛減速時,對實時加速度進行判定,實時加速度達到第二預設值時,獲取各個車輪上的支持力,構建基于后軸的力矩平衡方程;
14、將基于前軸的力矩平衡方程與基于后軸的力矩平衡方程進行聯立求解,得到車輛重心坐標中的z坐標的數值,得到車輛重心坐標。
15、優選的,所述基于車輛重心坐標以及預設的車輛模型構建車輛側翻仿真模型,通過預設的仿真軟件對車輛側翻仿真模型進行處理,生成側翻預警結果的步驟,具體包括:
16、調取預設的車輛模型,基于車輛重心坐標對車輛模型進行調整,使得車輛模型的重心與車輛重心坐標重合;
17、調取預設的仿真軟件,將調整后的車輛模型導入到仿真軟件中,并獲取實時的車輛駕駛參數,將導入到仿真軟件中進行仿真處理,得到仿真結果;
18、基于仿真結果判定車輛是否發生側翻,若判定發生側翻,則進行主動干預。
19、優選的,進行主動干預的方式包括控制電子穩定控制系統、防抱死制動系統、主動懸架控制和側翻緩解系統對車輛進行輔助操控。
20、本發明的另一目的在于提供一種智能汽車的車輛側翻預警系統,所述系統包括:
21、參數獲取模塊,用于獲取車輛駕駛參數,車輛駕駛參數至少包括車速、橫向加速度以及車身傾斜角度;
22、第一方程求解模塊,用于在車輛處于靜止狀態時,設定車輛重心坐標(x,y,z),根據預設的車輛屬性參數構建基于水平軸的力矩平衡方程,確定車輛重心坐標中的x和y;
23、第二方程求解模塊,用于在車輛行駛過程中,至少兩次獲取車輛的加速度構建基于車輛前軸和后軸的力矩平衡方程,確定車輛重心坐標中的z,得到車輛重心坐標;
24、仿真測試模塊,用于基于車輛重心坐標以及預設的車輛模型構建車輛側翻仿真模型,通過預設的仿真軟件對車輛側翻仿真模型進行處理,生成側翻預警結果。
25、優選的,所述第一方程求解模塊包括:
26、車重計算單元,用于在車輛啟動后尚處于靜止狀態時,同步獲取各個車輪對應的支持力,基于車輛的支持力計算得到車輛的總重量;
27、x坐標求解單元,用于根據車輪上的支持力以及車輛屬性參數中的長度數據構建基于x軸的力矩平衡方程,求解得到車輛重心坐標的y坐標的數值;
28、y坐標求解單元,用于根據車輪上的支持力以及車輛屬性參數中的寬度數據構建基于y軸的力矩平衡方程,求解得到車輛重心坐標的x坐標的數值。
29、優選的,所述第二方程求解模塊包括:
30、第一方程構建單元,用于在車輛行駛加速時,對實時加速度進行判定,實時加速度達到第一預設值時,獲取各個車輪上的支持力,構建基于前軸的力矩平衡方程;
31、第二方程構建單元,用于在車輛行駛減速時,對實時加速度進行判定,實時加速度達到第二預設值時,獲取各個車輪上的支持力,構建基于后軸的力矩平衡方程;
32、z坐標求解單元,用于將基于前軸的力矩平衡方程與基于后軸的力矩平衡方程進行聯立求解,得到車輛重心坐標中的z坐標的數值,得到車輛重心坐標。
33、優選的,所述仿真測試模塊包括:
34、車輛模型調整單元,用于調取預設的車輛模型,基于車輛重心坐標對車輛模型進行調整,使得車輛模型的重心與車輛重心坐標重合;
35、仿真處理單元,用于調取預設的仿真軟件,將調整后的車輛模型導入到仿真軟件中,并獲取實時的車輛駕駛參數,將導入到仿真軟件中進行仿真處理,得到仿真結果;
36、側翻預警單元,用于基于仿真結果判定車輛是否發生側翻,若判定發生側翻,則進行主動干預。
37、優選的,進行主動干預的方式包括控制電子穩定控制系統、防抱死制動系統、主動懸架控制和側翻緩解系統對車輛進行輔助操控。
38、本發明提供的一種智能汽車的車輛側翻預警方法,在車輛行駛的過程中,對車輛的駕駛數據進行采集,根據車輛的駕駛數據計算車輛的實時重心位置,基于實時重心位置對車輛模型進行調整,從而利用預設的仿真軟件進行仿真測試,以判定車輛是否會發生側翻,通過調整車輛模型能夠使仿真結果更精準,大大提高了側翻預警的準確性。
技術特征:
1.一種智能汽車的車輛側翻預警方法,其特征在于,所述方法包括:
2.根據權利要求1所述的智能汽車的車輛側翻預警方法,其特征在于,所述在車輛處于靜止狀態時,設定車輛重心坐標(x,y,z),根據預設的車輛屬性參數構建基于水平軸的力矩平衡方程,確定車輛重心坐標中的x和y的步驟,具體包括:
3.根據權利要求1所述的智能汽車的車輛側翻預警方法,其特征在于,所述在車輛行駛過程中,至少兩次獲取車輛的加速度構建基于車輛前軸和后軸的力矩平衡方程,確定車輛重心坐標中的z,得到車輛重心坐標的步驟,具體包括:
4.根據權利要求1所述的智能汽車的車輛側翻預警方法,其特征在于,所述基于車輛重心坐標以及預設的車輛模型構建車輛側翻仿真模型,通過預設的仿真軟件對車輛側翻仿真模型進行處理,生成側翻預警結果的步驟,具體包括:
5.根據權利要求4所述的智能汽車的車輛側翻預警方法,其特征在于,進行主動干預的方式包括控制電子穩定控制系統、防抱死制動系統、主動懸架控制和側翻緩解系統對車輛進行輔助操控。
6.一種智能汽車的車輛側翻預警系統,其特征在于,所述系統包括:
7.根據權利要求6所述的智能汽車的車輛側翻預警系統,其特征在于,所述第一方程求解模塊包括:
8.根據權利要求6所述的智能汽車的車輛側翻預警系統,其特征在于,所述第二方程求解模塊包括:
9.根據權利要求6所述的智能汽車的車輛側翻預警系統,其特征在于,所述仿真測試模塊包括:
10.根據權利要求7所述的智能汽車的車輛側翻預警系統,其特征在于,進行主動干預的方式包括控制電子穩定控制系統、防抱死制動系統、主動懸架控制和側翻緩解系統對車輛進行輔助操控。
技術總結
本發明適用于車輛控制技術領域,尤其涉及一種智能汽車的車輛側翻預警方法及系統,所述方法包括:獲取車輛駕駛參數;在車輛處于靜止狀態時,設定車輛重心坐標(x,y,z),確定車輛重心坐標中的x和y;在車輛行駛過程中,構建基于車輛前軸和后軸的力矩平衡方程,確定車輛重心坐標中的z,得到車輛重心坐標;構建車輛側翻仿真模型,生成側翻預警結果。本發明對車輛的駕駛數據進行采集,根據車輛的駕駛數據計算車輛的實時重心位置,基于實時重心位置對車輛模型進行調整,從而利用預設的仿真軟件進行仿真測試,以判定車輛是否會發生側翻,通過調整車輛模型能夠使仿真結果更精準,大大提高了側翻預警的準確性。
技術研發人員:關蕊
受保護的技術使用者:遼寧科技學院
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!