一種跟車行駛方法、裝置、設備及可讀存儲介質與流程
本申請涉及智能駕駛,特別是涉及一種跟車行駛方法、裝置、設備及可讀存儲介質。
背景技術:
1、acc(adaptive?cruise?control,自適應巡航)中目標選擇算法,在單目相機采集圖像信息時,往往是劃分一定的區域,車輛經過該區域且滿足一定的條件,從而選擇該車輛作為跟車目標。然后,根據該跟車目標的速度對自身速度進行控制,實現跟車行駛。但是,在實際應用中,當出現一些特殊情況下,acc中目標選擇算法就會導致控速出現滯后問題,導致出現意外事故。
2、綜上所述,如何提高跟車行駛的安全性等問題,是目前本領域技術人員急需解決的技術問題。
技術實現思路
1、本申請的目的是提供一種跟車行駛方法、裝置、設備及可讀存儲介質,在檢出兩個目標的情況下,會基于兩個目標的具體情況,綜合確定最小加速度,從而基于最小加速度對自車的跟車速度進行控制,如此便可在無需切換跟車目標的情況下,考慮前車與前前車的具體情況,提高自適應巡航的安全性。
2、為解決上述技術問題,本申請提供如下技術方案:
3、一種跟車行駛方法,包括:
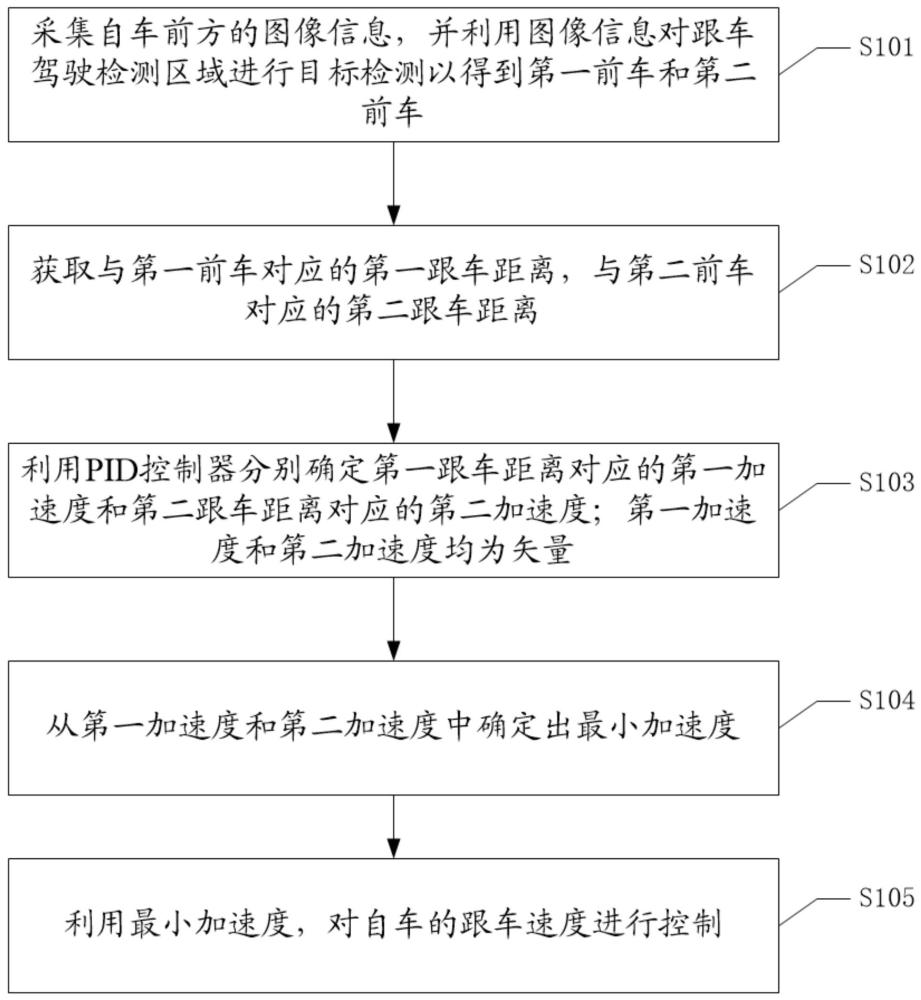
4、采集自車前方的圖像信息,并利用圖像信息對跟車駕駛檢測區域進行目標檢測以得到第一前車和第二前車;所述第二前車位于所述第一前車之前;
5、獲取與所述第一前車對應的第一跟車距離,與所述第二前車對應的第二跟車距離;
6、利用pid控制器分別確定所述第一跟車距離對應的第一加速度和所述第二跟車距離對應的第二加速度;所述第一加速度和所述第二加速度均為矢量;
7、從所述第一加速度和所述第二加速度中確定出最小加速度;
8、利用所述最小加速度,對自車的跟車速度進行控制。
9、可選的,在獲取與所述第一前車對應的第一跟車距離,與所述第二前車對應的第二跟車距離之后,還包括:
10、判斷所述第二跟車距離是否大于預設跟車閾值;
11、相應的,若判斷結果為否,則利用pid控制器分別確定所述第一跟車距離對應的第一加速度和所述第二跟車距離對應的第二加速度;
12、若判斷結果為是,則利用pid控制器確定所述第一跟車距離對應的第一加速度,并將所述第一加速度確定為最小加速度,并利用所述最小加速度,對自車的跟車速度進行控制。
13、可選的,利用pid控制器分別確定所述第一跟車距離對應的第一加速度和所述第二跟車距離對應的第二加速度,包括:
14、利用所述第一跟車距離,確定第一車速差;
15、利用所述第二跟車距離,確定第二車速差;
16、利用所述pid控制器確定與所述第一車速差對應的第一加速度;
17、利用所述pid控制器確定與所述第二車速差對應的第二加速度。
18、可選的,利用所述第一跟車距離,確定第一車速差,包括:
19、獲取自車與所述第一前車的安全距離;
20、將所述安全距離與所述第一跟車距離做差,得到第一差異距離;
21、利用所述第一差異距離,確定第一速度誤差;
22、將所述第一速度誤差與所述第一前車的車速進行疊加,得到第一前車車速;
23、利用所述第一前車車速與自車車速,確定所述第一車速差。
24、可選的,利用所述pid控制器確定與所述車速差對應的第一加速度,包括:
25、將所述車速差輸入所述pid控制器,并利用所述pid控制器中的比例單元、積分單元和微分單元進行處理以獲得所述第一加速度。
26、可選的,利用圖像信息對跟車駕駛檢測區域進行目標檢測以得到第一前車和第二前車,包括:
27、識別圖像信息中跟車駕駛檢測區域;
28、對所述跟車駕駛檢測區域進行車輛檢測,得到車輛信息;
29、利用所述車輛信息確定所述第一前車和所述第二前車。
30、可選的,利用所述最小加速度,對自車的跟車速度進行控制,包括:
31、若所述最小加速度的方向與自車行駛方式相同,則利用所述最小加速度的絕對值對所述跟車速度進行加速處理;
32、若所述最小加速度的方向與自車行駛方式相反,則利用所述最小加速度的絕對值對所述跟車速度進行減速處理。
33、一種跟車行駛裝置,包括:
34、圖像處理模塊,用于采集自車前方的圖像信息,并利用圖像信息對跟車駕駛檢測區域進行目標檢測以得到第一前車和第二前車;所述第二前車位于所述第一前車之前;
35、跟車距離確定模塊,用于獲取與所述第一前車對應的第一跟車距離,與所述第二前車對應的第二跟車距離;
36、加速度確定模塊,用于利用pid控制器分別確定所述第一跟車距離對應的第一加速度和所述第二跟車距離對應的第二加速度;所述第一加速度和所述第二加速度均為矢量;
37、速度控制模塊,用于從所述第一加速度和所述第二加速度中確定出最小加速度;利用所述最小加速度,對自車的跟車速度進行控制。
38、一種電子設備,包括:
39、存儲器,用于存儲計算機程序;
40、處理器,用于執行所述計算機程序時實現上述跟車行駛方法的步驟。
41、一種可讀存儲介質,所述可讀存儲介質上存儲有計算機程序,所述計算機程序被處理器執行時實現上述跟車行駛方法的步驟。
42、應用本申請實施例所提供的方法,采集自車前方的圖像信息,并利用圖像信息對跟車駕駛檢測區域進行目標檢測以得到第一前車和第二前車,第二前車位于第一前車之前;獲取與第一前車對應的第一跟車距離,與第二前車對應的第二跟車距離;利用pid控制器分別確定第一跟車距離對應的第一加速度和第二跟車距離對應的第二加速度;第一加速度和第二加速度均為矢量;從第一加速度和第二加速度中確定出最小加速度;利用最小加速度,對自車的跟車速度進行控制。
43、采集自車前方的圖像信息,然后利用該圖像信息可以對跟車駕駛檢測區域進行目標檢測以得到第一前車和第二前車。在獲取到第一前車和第二前車之后,獲取二者分別對應的跟車距離。然后,基于第一跟車距離確定出第一加速度,基于第二跟車速度確定出第二加速度。這里的加速度都是矢量。然后,將第一加速度和第二加速度中的較小者,確定為最小加速度。在對自車的跟車速度進行控制時,則基于該最小加速度進行控制。綜合考慮前車和前車的前車對跟車速度進行調整,能夠降低意外事故發生率,可以提高自適應巡航的安全性。
44、相應地,本申請實施例還提供了與上述跟車行駛方法相對應的跟車行駛裝置、設備和可讀存儲介質,具有上述技術效果,在此不再贅述。
技術特征:
1.一種跟車行駛方法,其特征在于,包括:
2.根據權利要求1所述的方法,其特征在于,在獲取與所述第一前車對應的第一跟車距離,與所述第二前車對應的第二跟車距離之后,還包括:
3.根據權利要求1所述的方法,其特征在于,利用pid控制器分別確定所述第一跟車距離對應的第一加速度和所述第二跟車距離對應的第二加速度,包括:
4.根據權利要求3所述的方法,其特征在于,利用所述第一跟車距離,確定第一車速差,包括:
5.根據權利要求3所述的方法,其特征在于,利用所述pid控制器確定與所述車速差對應的第一加速度,包括:
6.根據權利要求1所述的方法,其特征在于,利用圖像信息對跟車駕駛檢測區域進行目標檢測以得到第一前車和第二前車,包括:
7.根據權利要求1至6任一項所述的方法,其特征在于,利用所述最小加速度,對自車的跟車速度進行控制,包括:
8.一種跟車行駛裝置,其特征在于,包括:
9.一種電子設備,其特征在于,包括:
10.一種可讀存儲介質,其特征在于,所述可讀存儲介質上存儲有計算機程序,所述計算機程序被處理器執行時實現如權利要求1至7任一項所述跟車行駛方法的步驟。
技術總結
申請公開了一種跟車行駛方法、裝置、設備及可讀存儲介質,該方法包括:采集自車前方的圖像信息,并利用圖像信息對跟車駕駛檢測區域進行目標檢測以得到第一前車和第二前車,第二前車位于第一前車之前;獲取與第一前車對應的第一跟車距離,與第二前車對應的第二跟車距離;利用PID控制器分別確定第一跟車距離對應的第一加速度和第二跟車距離對應的第二加速度;第一加速度和第二加速度均為矢量;從第一加速度和第二加速度中確定出最小加速度;利用最小加速度,對自車的跟車速度進行控制。本申請綜合考慮前車和前車的前車對跟車速度進行調整,能夠降低意外事故發生率,可以提高自適應巡航的安全性。
技術研發人員:張立平,王升安,宋陽
受保護的技術使用者:知行汽車科技(蘇州)股份有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!