基于自評(píng)價(jià)機(jī)制的機(jī)車粘著控制方法及裝置與流程
本技術(shù)涉及軌道交通,特別是軌道機(jī)車中的傳動(dòng)控制,具體涉及一種基于自評(píng)價(jià)機(jī)制的機(jī)車粘著控制方法及裝置。
背景技術(shù):
1、當(dāng)機(jī)車軌道的軌面處于雨雪等自然天氣或者其表面存在異物等情況下,軌面或者路面粘著(附著)系數(shù)下降,車輛在運(yùn)行過程中容易出現(xiàn)空轉(zhuǎn)滑行現(xiàn)象,此種工況下,亟需解決的問題是在輪軌發(fā)生空轉(zhuǎn)滑行時(shí),快速抑制輪對(duì)空轉(zhuǎn)滑行現(xiàn)象,以避免空轉(zhuǎn)滑行對(duì)輪軌造成損傷,同時(shí)要保證牽引/制動(dòng)力發(fā)揮在最佳粘著點(diǎn)附近,保障車輛動(dòng)力。
2、粘著控制的難點(diǎn)在于軌面條件復(fù)雜多變且輪軌間粘著條件無法準(zhǔn)確測(cè)量,因?yàn)檩嗆夐g存在高度復(fù)雜性,很難通過經(jīng)驗(yàn)預(yù)設(shè)的方式,來設(shè)定滿足各種條件的控制參數(shù),比如保護(hù)閾值、減載斜率等。
3、現(xiàn)有技術(shù)中,粘著控制方法多為采用組合校正法或pid(比例(proportional)、積分(integral)、微分(derivative))控制方法,該方法設(shè)計(jì)簡(jiǎn)單有效,但是高度依賴設(shè)計(jì)人員經(jīng)驗(yàn),且單一控制參數(shù)無法保證在復(fù)雜多變的輪軌接觸條件下的均獲得良好的控制效果;隨著控制技術(shù)的發(fā)展,不斷出現(xiàn)一些滑膜控制、神經(jīng)網(wǎng)絡(luò)控制等最優(yōu)粘著控制方法,然而隨著輪軌接觸條件的快速變化,在追尋最優(yōu)控制的過程中控制方法的復(fù)雜性越來越高,在工程應(yīng)用存在諸多問題;所以存在部分依托傳統(tǒng)控制策略的改進(jìn)方法,可以在控制過程中調(diào)整閾值或者加減載斜率,如何保證調(diào)整后的參數(shù)對(duì)于控制有正向效果而不是反向效果就變得十分重要。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的一個(gè)目的在于提供一種基于自評(píng)價(jià)機(jī)制的機(jī)車粘著控制方法,首先,通過對(duì)輪軌粘著特性特征獲取,接著,從蠕滑率、減載比例等方面對(duì)每次粘著控制效果進(jìn)行綜合評(píng)價(jià),最后根據(jù)粘著控制的評(píng)價(jià)結(jié)果,按照輪對(duì)蠕滑率和加速度指標(biāo),對(duì)控制閾值、減載斜率進(jìn)行自適應(yīng)調(diào)整,從而在復(fù)雜多變的輪軌條件下都能得到更優(yōu)的粘著控制效果。
2、本發(fā)明的另一個(gè)目的在于提供一種基于自評(píng)價(jià)機(jī)制的機(jī)車粘著控制裝置。本發(fā)明的還一個(gè)目的在于提供一種電子設(shè)備,該電子設(shè)備包括存儲(chǔ)器和處理器,存儲(chǔ)器存儲(chǔ)有計(jì)算機(jī)程序,處理器執(zhí)行計(jì)算機(jī)程序時(shí)實(shí)現(xiàn)上述基于自評(píng)價(jià)機(jī)制的機(jī)車粘著控制方法的步驟。本發(fā)明的還一個(gè)目的在于提供一種可讀介質(zhì),其上存儲(chǔ)有計(jì)算機(jī)程序,計(jì)算機(jī)程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)上述基于自評(píng)價(jià)機(jī)制的機(jī)車粘著控制方法的步驟。
3、為解決本技術(shù)背景技術(shù)中的技術(shù)問題,本發(fā)明提供以下技術(shù)方案:
4、第一方面,本發(fā)明提供一種基于自評(píng)價(jià)機(jī)制的機(jī)車粘著控制方法,包括:
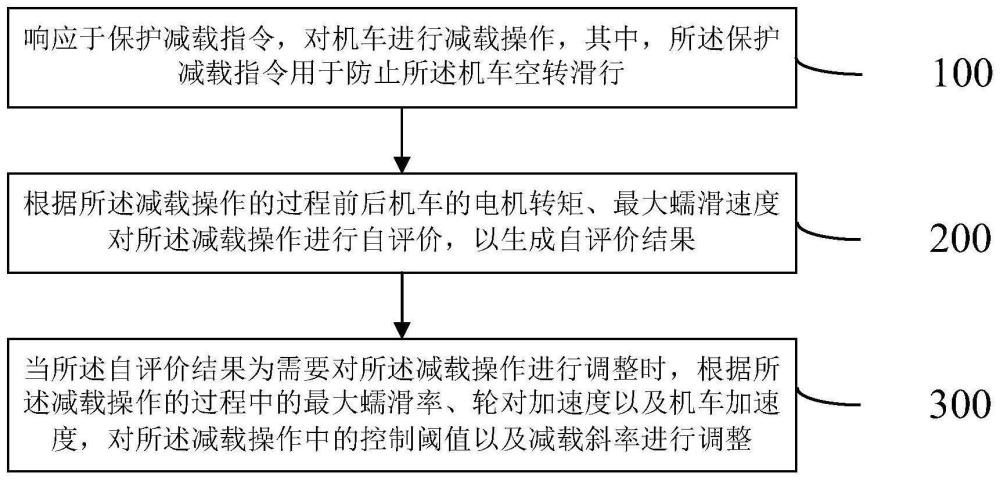
5、響應(yīng)于保護(hù)減載指令,對(duì)機(jī)車進(jìn)行減載操作,其中,所述保護(hù)減載指令用于防止所述機(jī)車空轉(zhuǎn)滑行;
6、根據(jù)所述減載操作的過程前后機(jī)車的電機(jī)轉(zhuǎn)矩、最大蠕滑速度對(duì)所述減載操作進(jìn)行自評(píng)價(jià),以生成自評(píng)價(jià)結(jié)果;
7、當(dāng)所述自評(píng)價(jià)結(jié)果為需要對(duì)所述減載操作進(jìn)行調(diào)整時(shí),根據(jù)所述減載操作的過程中的最大蠕滑率、輪對(duì)加速度以及機(jī)車加速度,對(duì)所述減載操作中的控制閾值以及減載斜率進(jìn)行調(diào)整。
8、在本發(fā)明的一實(shí)施例中,根據(jù)所述減載操作的過程前后機(jī)車的電機(jī)轉(zhuǎn)矩、最大蠕滑速度對(duì)所述減載操作進(jìn)行自評(píng)價(jià),以生成自評(píng)價(jià)結(jié)果,包括:
9、根據(jù)所述機(jī)車在減載操作前的電機(jī)轉(zhuǎn)矩確定所述機(jī)車當(dāng)前工況下的粘著特性曲線;
10、在預(yù)先生成的粘著特性曲線經(jīng)驗(yàn)庫中對(duì)所述粘著特性曲線進(jìn)行比對(duì),以生成比對(duì)結(jié)果,其中,所述比對(duì)結(jié)果中包括與所述機(jī)車當(dāng)前工況下的粘著特性曲線最相近的粘著特性經(jīng)驗(yàn)曲線;
11、根據(jù)所述減載操作的過程前后機(jī)車的電機(jī)轉(zhuǎn)矩、最大蠕滑速度以及所述比對(duì)結(jié)果生成所述自評(píng)價(jià)結(jié)果。
12、在本發(fā)明的一實(shí)施例中,根據(jù)所述機(jī)車在減載操作前的電機(jī)轉(zhuǎn)矩確定所述機(jī)車當(dāng)前工況下的粘著特性曲線,包括:
13、根據(jù)所述機(jī)車在減載操作前的電機(jī)轉(zhuǎn)矩生成所述機(jī)車輪軌的最大粘著系數(shù);
14、根據(jù)所述最大粘著系數(shù)生成所述粘著特性曲線。
15、在本發(fā)明的一實(shí)施例中,根據(jù)所述減載操作的過程前后機(jī)車的電機(jī)轉(zhuǎn)矩、最大蠕滑速度以及所述比對(duì)結(jié)果生成所述自評(píng)價(jià)結(jié)果,包括:
16、根據(jù)所述減載操作的過程前后機(jī)車的電機(jī)轉(zhuǎn)矩生成所述機(jī)車電機(jī)的轉(zhuǎn)矩減載比例;
17、根據(jù)所述轉(zhuǎn)矩減載比例、最大蠕滑速度以及所述比對(duì)結(jié)果生成所述自評(píng)價(jià)結(jié)果。
18、在本發(fā)明的一實(shí)施例中,根據(jù)所述轉(zhuǎn)矩減載比例、最大蠕滑速度以及所述比對(duì)結(jié)果生成所述自評(píng)價(jià)結(jié)果,包括:
19、根據(jù)所述比對(duì)結(jié)果確定所述粘著特性經(jīng)驗(yàn)曲線對(duì)應(yīng)的轉(zhuǎn)矩減載比例、最大蠕滑速度;
20、根據(jù)所述減載操作的過程對(duì)應(yīng)的轉(zhuǎn)矩減載比例、最大蠕滑速度以及所述粘著特性經(jīng)驗(yàn)曲線對(duì)應(yīng)的轉(zhuǎn)矩減載比例、最大蠕滑速度生成所述自評(píng)價(jià)結(jié)果。
21、在本發(fā)明的一實(shí)施例中,所述控制閾值包括:蠕滑率閾值以及加速度閾值;
22、根據(jù)所述減載操作的過程中的最大蠕滑率、輪對(duì)加速度以及機(jī)車加速度,對(duì)所述減載操作中的控制閾值以及減載斜率進(jìn)行調(diào)整,包括:
23、生成所述減載操作的過程中所述輪對(duì)加速度與所述機(jī)車加速度之間的最大差值;
24、根據(jù)所述最大蠕滑率以及所述最大差值對(duì)所述減載操作中的控制閾值以及減載斜率進(jìn)行調(diào)整。
25、在本發(fā)明的一實(shí)施例中,根據(jù)所述最大蠕滑率以及所述最大差值對(duì)所述減載操作中的控制閾值以及減載斜率進(jìn)行調(diào)整,包括:
26、生成所述粘著特性經(jīng)驗(yàn)曲線對(duì)應(yīng)的所述最大蠕滑率以及所述最大差值;
27、根據(jù)所述減載操作的過程中的最大蠕滑率、最大差值、所述粘著特性經(jīng)驗(yàn)曲線對(duì)應(yīng)的所述最大蠕滑率以及所述最大差值對(duì)所述減載操作中的控制閾值以及減載斜率進(jìn)行調(diào)整。
28、第二方面,本發(fā)明提供一種基于自評(píng)價(jià)機(jī)制的機(jī)車粘著控制裝置,該裝置包括:
29、機(jī)車減載模塊,用于響應(yīng)于保護(hù)減載指令,對(duì)機(jī)車進(jìn)行減載操作,其中,所述保護(hù)減載指令用于防止所述機(jī)車空轉(zhuǎn)滑行;
30、減載自評(píng)價(jià)模塊,用于根據(jù)所述減載操作的過程前后機(jī)車的電機(jī)轉(zhuǎn)矩、最大蠕滑速度對(duì)所述減載操作進(jìn)行自評(píng)價(jià),以生成自評(píng)價(jià)結(jié)果;
31、減載調(diào)整模塊,用于當(dāng)所述自評(píng)價(jià)結(jié)果為需要對(duì)所述減載操作進(jìn)行調(diào)整時(shí),根據(jù)所述減載操作的過程中的最大蠕滑率、輪對(duì)加速度以及機(jī)車加速度,對(duì)所述減載操作中的控制閾值以及減載斜率進(jìn)行調(diào)整。
32、在本發(fā)明的一實(shí)施例中,所述減載自評(píng)價(jià)模塊包括:
33、特性曲線確定單元,用于根據(jù)所述機(jī)車在減載操作前的電機(jī)轉(zhuǎn)矩確定所述機(jī)車當(dāng)前工況下的粘著特性曲線;
34、特性曲線比對(duì)單元,用于在預(yù)先生成的粘著特性曲線經(jīng)驗(yàn)庫中對(duì)所述粘著特性曲線進(jìn)行比對(duì),以生成比對(duì)結(jié)果,其中,所述比對(duì)結(jié)果中包括與所述機(jī)車當(dāng)前工況下的粘著特性曲線最相近的粘著特性經(jīng)驗(yàn)曲線;
35、評(píng)價(jià)結(jié)果生成單元,用于根據(jù)所述減載操作的過程前后機(jī)車的電機(jī)轉(zhuǎn)矩、最大蠕滑速度以及所述比對(duì)結(jié)果生成所述自評(píng)價(jià)結(jié)果。
36、在本發(fā)明的一實(shí)施例中,所述特性曲線確定單元包括:
37、最大系數(shù)計(jì)算單元,用于根據(jù)所述機(jī)車在減載操作前的電機(jī)轉(zhuǎn)矩生成所述機(jī)車輪軌的最大粘著系數(shù);
38、特性曲線確定子單元,用于根據(jù)所述最大粘著系數(shù)生成所述粘著特性曲線。
39、在本發(fā)明的一實(shí)施例中,所述評(píng)價(jià)結(jié)果生成單元包括:
40、減載比例生成單元,用于根據(jù)所述減載操作的過程前后機(jī)車的電機(jī)轉(zhuǎn)矩生成所述機(jī)車電機(jī)的轉(zhuǎn)矩減載比例;
41、評(píng)價(jià)結(jié)果生成子單元,用于根據(jù)所述轉(zhuǎn)矩減載比例、最大蠕滑速度以及所述比對(duì)結(jié)果生成所述自評(píng)價(jià)結(jié)果。
42、在本發(fā)明的一實(shí)施例中,所述評(píng)價(jià)結(jié)果生成子單元包括:
43、比對(duì)參數(shù)確定單元,用于根據(jù)所述比對(duì)結(jié)果確定所述粘著特性經(jīng)驗(yàn)曲線對(duì)應(yīng)的轉(zhuǎn)矩減載比例、最大蠕滑速度;
44、結(jié)果評(píng)價(jià)單元,用于根據(jù)所述減載操作的過程對(duì)應(yīng)的轉(zhuǎn)矩減載比例、最大蠕滑速度以及所述粘著特性經(jīng)驗(yàn)曲線對(duì)應(yīng)的轉(zhuǎn)矩減載比例、最大蠕滑速度生成所述自評(píng)價(jià)結(jié)果。
45、在本發(fā)明的一實(shí)施例中,所述控制閾值包括:蠕滑率閾值以及加速度閾值;
46、所述減載調(diào)整模塊包括:
47、最大差值生成第一單元,用于生成所述減載操作的過程中所述輪對(duì)加速度與所述機(jī)車加速度之間的最大差值;
48、減載調(diào)整單元,用于根據(jù)所述最大蠕滑率以及所述最大差值對(duì)所述減載操作中的控制閾值以及減載斜率進(jìn)行調(diào)整。
49、在本發(fā)明的一實(shí)施例中,所述減載調(diào)整單元包括:
50、最大差值生成第二單元,用于生成所述粘著特性經(jīng)驗(yàn)曲線對(duì)應(yīng)的所述最大蠕滑率以及所述最大差值;
51、減載調(diào)整子單元,用于根據(jù)所述減載操作的過程中的最大蠕滑率、最大差值、所述粘著特性經(jīng)驗(yàn)曲線對(duì)應(yīng)的所述最大蠕滑率以及所述最大差值對(duì)所述減載操作中的控制閾值以及減載斜率進(jìn)行調(diào)整。
52、第三方面,本發(fā)明提供一種計(jì)算機(jī)程序產(chǎn)品,包括計(jì)算機(jī)程序/指令,該計(jì)算機(jī)程序/指令被處理器執(zhí)行時(shí)實(shí)現(xiàn)一種基于自評(píng)價(jià)機(jī)制的機(jī)車粘著控制方法的步驟。
53、第四方面,本發(fā)明提供一種電子設(shè)備,包括存儲(chǔ)器、處理器及存儲(chǔ)在存儲(chǔ)器上并可在處理器上運(yùn)行的計(jì)算機(jī)程序,處理器執(zhí)行程序時(shí)實(shí)現(xiàn)基于自評(píng)價(jià)機(jī)制的機(jī)車粘著控制方法的步驟。
54、第五方面,本發(fā)明提供一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),其上存儲(chǔ)有計(jì)算機(jī)程序,該計(jì)算機(jī)程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)基于自評(píng)價(jià)機(jī)制的機(jī)車粘著控制方法的步驟。
55、從上述描述可知,本發(fā)明實(shí)施例提供一種基于自評(píng)價(jià)機(jī)制的機(jī)車粘著控制方法及裝置,對(duì)應(yīng)的基于自評(píng)價(jià)機(jī)制的機(jī)車粘著控制方法包括:首先響應(yīng)于保護(hù)減載指令,對(duì)機(jī)車進(jìn)行減載操作,其中,保護(hù)減載指令用于防止機(jī)車空轉(zhuǎn)滑行;接著,根據(jù)減載操作的過程前后機(jī)車的電機(jī)轉(zhuǎn)矩、最大蠕滑速度對(duì)減載操作進(jìn)行自評(píng)價(jià),以生成自評(píng)價(jià)結(jié)果;最后當(dāng)自評(píng)價(jià)結(jié)果為需要對(duì)減載操作進(jìn)行調(diào)整時(shí),根據(jù)減載操作的過程中的最大蠕滑率、輪對(duì)加速度以及機(jī)車加速度,對(duì)減載操作中的控制閾值以及減載斜率進(jìn)行調(diào)整。
56、對(duì)應(yīng)的基于自評(píng)價(jià)機(jī)制的機(jī)車粘著控制裝置包括:機(jī)車減載模塊,用于響應(yīng)于保護(hù)減載指令,對(duì)機(jī)車進(jìn)行減載操作,其中,保護(hù)減載指令用于防止機(jī)車空轉(zhuǎn)滑行;減載自評(píng)價(jià)模塊,用于根據(jù)減載操作的過程前后機(jī)車的電機(jī)轉(zhuǎn)矩、最大蠕滑速度對(duì)減載操作進(jìn)行自評(píng)價(jià),以生成自評(píng)價(jià)結(jié)果;減載調(diào)整模塊,用于當(dāng)自評(píng)價(jià)結(jié)果為需要對(duì)減載操作進(jìn)行調(diào)整時(shí),根據(jù)減載操作的過程中的最大蠕滑率、輪對(duì)加速度以及機(jī)車加速度,對(duì)減載操作中的控制閾值以及減載斜率進(jìn)行調(diào)整。
57、本發(fā)明實(shí)施例所提供的基于自評(píng)價(jià)機(jī)制的機(jī)車粘著控制方法及裝置,對(duì)粘著控制過程中每次空轉(zhuǎn)控制結(jié)果進(jìn)行評(píng)估,具體地,首先通過對(duì)輪軌粘著特性特征獲取,從蠕滑率、減載比例等方面對(duì)每次粘著控制效果進(jìn)行綜合評(píng)價(jià),接著,根據(jù)粘著控制的評(píng)價(jià)結(jié)果,按照輪對(duì)蠕滑率和加速度指標(biāo),對(duì)控制閾值、減載斜率進(jìn)行自適應(yīng)調(diào)整,從而在復(fù)雜多變的輪軌條件下都能得到較為顯著的粘著控制效果。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!