一種具有可選通道浮力均衡系統的制作方法
本發明涉及一種具有可選通道浮力均衡系統,可以用于無人水下航行器配套的浮力調節,屬于uuv。
背景技術:
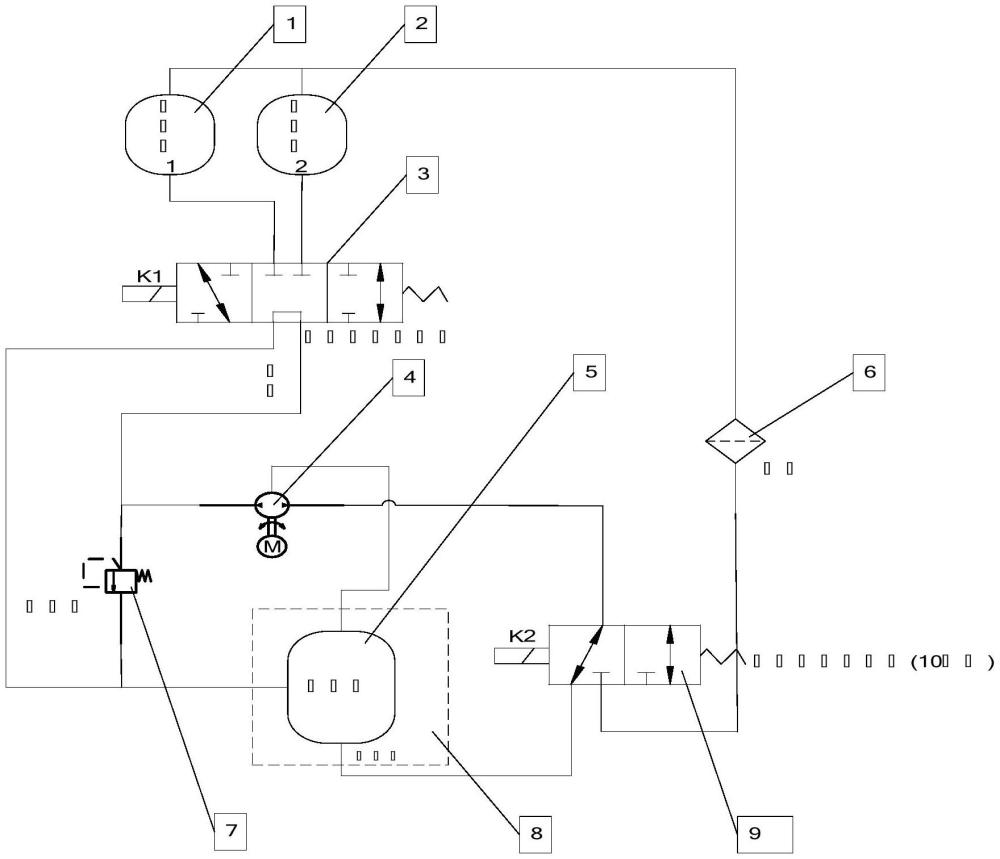
1、為了實現無人水下航行器的下沉和上浮,通常在航行器的底部設置有浮力均衡系統,以圖1傳統浮力均衡系統為例,其主要由儲油艙油囊、壓力傳感器、溫度傳感器、安全閥、加注活門、減壓閥、單向閥、電機泵、過濾器電磁開關閥、齒輪流量計、硬管球閥和浮力均衡裝置油囊組成,具體原理圖如附圖1所示。
2、傳統浮力均衡系統無法回避的幾個問題,具體如下:
3、(1)由于小油囊豎直放置在無人艇的兩側,如不控制油液進入小油囊的通道,在排油過程中,會出現無人艇向一側傾斜的風險,極端情況有傾覆的風險;
4、(2)2個油濾位置、2個單向閥等設備,增加下潛過程中齒輪泵的吸油阻力,并隨著工作進程,電機泵組件的進口壓力存在波動;
5、(3)整個系統結構復雜,相關轉接接口較多,系統重量接近指標要求,總體提出減重需求。
6、目前沒有找到類似的發明專利,只有近似浮力調節裝置,具體專利如下:
7、中國專利cn?202030086b公開了一種浮力調節裝置,用于海洋監測及海洋勘測,接近現有浮力裝置質量、體積和功耗偏大的問題。
8、該專利主要問題在于以下幾個方面:
9、1、只有一個小油囊,無法實現油路通道的選擇;
10、2、為了提高浮力調節的有效性,只能布置無人艇的軸線上,對無人艇的結構布局造成不便;
11、3、專利中選用兩個“兩位兩通閥”作為控制開關,同時增加了單向閥和節流閥,來實現油液的容量控制,不能有效的實現程序控制;
12、4、機械接口較多,系統相對復雜,不利于質量和體積的優化。
技術實現思路
1、本發明的技術解決問題是:克服現有技術的不足,提供了一種具有可選通道浮力均衡系統,能夠有效提高系統的可靠性,避免無人艇上油囊之間容積的隨機差異,大大降低無人艇傾覆風險。
2、本發明的技術解決方案是:
3、一種具有可選通道浮力均衡系統,包括:第一小油囊、第二小油囊、三位四通電磁閥、電機泵組件、大油囊、油濾、安全閥、封閉艙、兩位三通電磁閥;
4、大油囊放置在封閉艙中,通過端面法蘭固定,大油囊與外部存在三個接口,其一與電機泵組件連接,為電機泵組件泄漏油液回油箱的通道;其二與兩位三通電磁閥連接,為吸油或回油的通道;其三與安全閥、三位四通電磁閥連接,安全閥過壓保護后開啟,高壓油泄放回大油囊;允許電機泵組件空載啟動,降低啟動電流;
5、三位四通電磁閥有三個位置,零位與大油囊連接作為中間油路;10狀態位與第一小油囊連接,作為大油囊與第一小油囊連接通道,即左側油路;01狀態位與第二小油囊連接,作為大油囊與第二小油囊連接通道,即右側油路;
6、油濾用于為整個浮力均衡系統油液過濾。
7、進一步的,小油囊和小油囊的總容積小于大油囊的容積。
8、進一步的,所述浮力均衡系統具有從大油囊吸油和從小油囊吸油兩種工作模式,分別對應下沉和上浮。
9、進一步的,還包括控制器,通過控制器給三位四通電磁閥發送不同狀態字對應不同的位置,進而實現通道的選擇。
10、進一步的,三位四通電磁閥對應的狀態字包括:00、10、01,其含義分別為:
11、00狀態:對應零位,使用中間油路;
12、10狀態:對應10狀態位,使用左側油路;
13、01狀態:對應01狀態位,使用右側油路。
14、進一步的,兩位三通電磁閥對應的狀態字包括:10、01,其含義分別為:
15、10狀態,從大油囊吸油;
16、01狀態,從第一小油囊和第二小油囊吸油。
17、進一步的,浮力均衡系統處于從大油囊吸油狀態時,按照如下步驟進行:
18、步驟一、三位四通電磁閥初始狀態字為00,即在零位;兩位三通電磁閥初始狀態字為10,從大油囊吸油;
19、步驟二、進行參數裝訂,包括排出油液的體積和分配次數,默認分配次數為5次,即排出油液的體積分五次加注到目標油囊;
20、步驟三、根據電機泵組件轉速計算單次注油的時間,即為δt;
21、步驟四、將三位四通電磁閥狀態字置為10,即與左側油路聯通,并記錄時間t0,根據單次加入的油量分配時間間隔δt,則在t0+δt時刻,再將三位四通電磁閥狀態字置為01;
22、步驟五、當三位四通電磁閥狀態字置為01時,即與右側油路聯通,記錄時間t1,根據單次加入的油量分配時間間隔δt,則在t1+δt時刻,將三位四通電磁閥狀態字置為10;
23、步驟六、經過五次循環后,兩個小油囊的液位達到容積指令的要求后,停止加注,將三位四通電磁閥狀態字置為00,同時關閉電機泵組件供電。
24、進一步的,浮力均衡系統處于從小油囊吸油狀態時,按照如下步驟進行:
25、步驟一、將兩位三通電磁閥初始狀態字置為01,選通第一小油囊油口,此時第二小油囊油口封閉,從大油囊吸油,經三位四通電磁閥左側油路給第一小油囊注油;
26、步驟二、將兩位三通電磁閥初始狀態字為10,選通第二小油囊油口,此時第一小油囊油口封閉,從大油囊吸油,經三位四通電磁閥右側油路給第二小油囊注油;
27、步驟三,根據容積指令,計算單次注油時間δt,在完成兩位三通電磁閥狀態切換后,按照注油時間δt依次進行五次注油;
28、步驟四,從第一小油囊和第二小油囊吸油時,需要將兩位三通電磁閥初始狀態字更改為01;
29、步驟五、第一小油囊和第二小油囊內部存在油壓,當兩位三通電磁閥初始狀態字為01時,油液在背壓的作用下流動,吸油初期,不需要電機泵組件滿功率輸出,降低啟動電流的需求;
30、步驟六、油液經油濾和兩位三通電磁閥形成的油路到達電機泵組件;
31、步驟七、根據容積指令和大油囊的液位反饋,完成對吸油的容積的控制;
32、步驟八、完成吸油后,將兩位三通閥置為初始狀態字10,即切換到從大油囊吸油狀態。
33、進一步的,根據電機泵組件轉速計算單次注油的時間δt,具體為:
34、假設從大油囊吸油,向第一小油囊和第二小油囊分別注入5升,即容積指令為10升:
35、首先向第一小油囊注油1升;然后向第二小油囊注油1升;以此類推,進行五次;
36、按照2升/min的注油速度計算,則單次注油時間間隔為δt=0.5min。
37、本發明與現有技術相比的有益效果是:
38、(1)本發明采用程序控制“三位四通電磁閥”,可以有效的控制油液的方向,進而實現第一小油囊和第二小油囊通道之間的切換;
39、(2)本發明采用程序控制“兩位三通電磁閥”,可以簡化系統構成,降低油路損失;
40、(3)本發明在吸油過程中,第一小油囊和第二小油囊處于增壓狀態,在初始狀態下,相當于增壓油箱,降低了電機啟動時的負載電流,消除帶載啟動的沖擊;
41、(4)本發明系統簡化后,結構緊湊,減少相關轉接接口,整個系統的重量明顯降低。
- 還沒有人留言評論。精彩留言會獲得點贊!