一種無人機的飛行數據安全監測系統的制作方法
本發明涉及無人機數據安全監測,特別是一種無人機的飛行數據安全監測系統。
背景技術:
1、無人機(無人駕駛飛機)是一種以無線電遙控或由自身程序控制為主的不載人飛機。主要包括軍隊用無人機以及民用無人機,無人機具有體積小、造價低、使用方便、對環境(包括起飛及降落環境)要求低的優點,備受使用者的青睞。
2、實際飛行時,無人機在自身多種傳感器作用下,?能回傳飛行中的高度以及飛行速度、氣象數據,以及飛行區域視頻數據等。雖然現有的無人機在多種傳感器作用下,一定程度上滿足了無人機采集數據以及自身安全飛行控制需要,但是受到結構所限,也還存在一些如下的技術問題亟待解決。其一:當無人機飛行到視野不好的區域,比如濃霧天氣、或者無人機具有夜視功能的攝像頭因故障出現回傳到飛控端(飛控端具有經控制系統無線遙控無人機飛行的功能,還能接收無人機回傳的數據、經顯示屏顯示的功能)的圖像不清晰,這樣,飛控端操作人員不能有效知曉無線遙控設備發出的指令、無人機是否產生了相應動作,會對無人機的安全飛行造成一定隱患(比如說飛控端人員經無線遙控設備控制無人機前或飛行、上升或下降高度后,由于回傳的視頻信號模糊,并不能保證發出的飛控指令得到了無人機的相應執行)。其二:不具有升降電機工作數據監測功能,飛行中飛控端操作人員并不能及時了解到相應升降電機的轉速數據,比如說相應一個或以上電機因故障最大轉速降低,由于相關人員沒有及時對其進行維護,無人機的飛行存在一定的安全隱患。其三:不具有主要受力點起落支撐架、支撐臂(多只支撐臂外側端分別安裝多個升降電機)安全監測功能,在因為質量問題或者材料老化因素等影響,支撐架、支撐臂出現不顯眼的裂開等問題時,由于相關人員不能及時對其進行維護,無人機的飛行及降落存在一定的安全隱患(比如飛行中支撐臂突然斷裂,降落中支撐架折斷等)。
技術實現思路
1、為了克服現有無人機由于結構所限,存在如背景技術所述弊端,本發明提供了在相關機構共同作用下,能實時回傳無人機飛行在視野不好的區域,攝像頭不能有效采集的無人機上升或下降高度、前飛或后退、降落到地等圖像數據,以及無人機的升降電機轉速數據,起落支撐架、支撐臂是否出現結構性損壞數據到飛控端,飛控端相關軟件單元對多種數據進行智能分析后,在相應數據異常時能及時提示飛控端人員采取相應措施(比如及時控制出現故障的無人機返航或降落到地等),為無人機安全飛行起到了有力技術支持的一種無人機的飛行數據安全監測系統。
2、本發明解決其技術問題所采用的技術方案是:
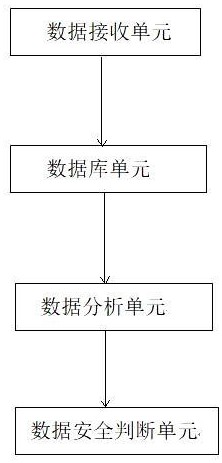
3、一種無人機的飛行數據安全監測系統,包括數據接收單元、數據庫單元、數據分析單元、數據安全判斷單元、轉速檢測機構、上升及下降檢測機構、前飛及后飛檢測機構、降落檢測機構、檢測電路、強度探測電路、數據傳輸電路;所述數據接收單元、數據庫單元、數據分析單元、數據安全判斷單元是安裝在無人機飛控端控制系統內的應用軟件;所述數據接收單元能接收數據傳輸電路無線方式傳輸的無人機多個升降電機轉速數據、前及后飛數據、上升及下降數據、起落支撐架觸地數據、起落支撐架及支撐臂出現結構性損壞數據,并將數據初步處理后傳輸到數據分析單元;所述數據分析單元基于人工智能調閱數據庫單元內的數據、對數據接收單元輸入的多種數據,結合無人機飛控端操作人員經無線遙控機構發出的無線指令數據進行分析,在無人機有升降電機轉速異常和前及后飛異常、上升及下降異常、起落支撐架觸地異常、支撐臂及起落支撐架出現結構性損壞時,能經數據安全判斷單元報警提示飛控端操作人員;所述轉速檢測機構有多套,轉速檢測機構是交流發電機,發電機的磁鐵固定安裝在升降電機的轉軸外側,發電機的線圈固定安裝在升降電機的殼體上部外側;所述前飛及后飛檢測機構是直流發電機,直流發電機固定安裝在無人機的下端;所述降落檢測機構是壓力傳感器,壓力傳感器的上端固定安裝在無人機的其中一個起落支撐架的柱體下端,壓力傳感器的下端固定安裝在起落支撐架的下架體上端;所述上升及下降檢測機構包括支撐座、活動板、壓力電阻,活動板一側端轉動安裝在支撐座內一側,活動板另一側端上下側分別固定安裝有緩沖墊,兩只壓力電阻分別固定安裝在支撐座內另一側上下端,支撐座下端安裝在無人機的上端外;所述強度探測電路有多套,每路強度探測電路配套有檢測線,多根檢測線拉直分別安裝在無人機的起落支撐架、支撐臂的外側端;所述檢測電路、數據傳輸電路、強度探測電路安裝在無人機電控箱內,轉速檢測機構、前飛及后飛檢測機構、降落檢測機構、檢測電路、強度探測電路的信號輸出端和數據傳輸電路的多路信號輸入端分別電性連接。
4、進一步地,所述數據分析單元能對無人機自身采集的飛行速度、飛行高度、氣象數據、視頻數據進行分析,在飛行速度、飛行高度偏高及偏低,飛行區域氣象數據和網絡上所在飛行區域氣象數據偏差,飛行區域地形數據和網絡上所在飛行區域地形數據偏差時,能經數據安全判斷單元報警提示飛控端操作人員、無人機自身或其攜帶的傳感器存在故障,以及無人機存在偏航情況。
5、進一步地,所述數據庫單元內存有無人機多個升降電機的最高及最低工作轉速數據,無人機落地后壓力傳感器輸出的信號電壓大小數據,無人機前飛及后飛時直流發電機輸出的最低及最大電壓數據,無人機上升及下降時檢測電路輸出的最低及最大電壓數據。
6、進一步地,所述數據安全判斷單元提示飛控端操作人員的方式包括屏幕顯示方式及報警聲方式。
7、進一步地,所述發電機的磁鐵位于線圈的內圈內,磁鐵的外側和線圈的內側間隔距離。
8、進一步地,所述支撐座內的上端緩沖墊上側及下側緩沖墊的下側分別和上端及下端壓力電阻的受力面接觸。
9、進一步地,所述檢測電路包括電性?連接的兩只電阻,并和兩只壓力電阻之間連接,兩只壓力電阻一端連接,兩只壓力電阻另一端和兩只電阻一端分別連接。
10、進一步地,所述強度探測電路包括電性連接的三極管、電阻,并和檢測線線連接,第一只電阻一端和第二只電阻一端、第一只三極管發射極連接,第一只電阻另一端和第二只三極管基極、檢測線線首端連接,檢測線末端和第二只三極管發射極連接,第二只三極管集電極和第二只電阻另一端、第一只三極管基極連接。
11、進一步地,所述數據傳輸電路包括電性連接的單片機模塊、4g數據發送模塊、電阻、二極管,單片機模塊、4g數據發送模塊的電源輸入端連接,十三只電阻和單片機模塊的其中十三個信號輸入端1分別連接,其中三只電阻另一端和三只二極管負極連接。
12、和現有技術相比本發明有益效果是:本發明在相關機構共同作用下,數據傳輸電路能實時回傳無人機飛行在視野不好的區域,攝像頭不能有效采集的無人機上升或下降高度、前飛或后退、降落到地等圖像數據,以及無人機的升降電機轉速數據,起落支撐架、支撐臂是否出現結構性損壞數據到飛控端,飛控端相關軟件單元對多種數據進行智能分析后,在包括無人機自身及傳感器數據異常時能及時經飛控端顯示屏文字顯示以及發出報警聲音、提示飛控端人員采取相應措施(比如及時控制出現故障的無人機返航或降落到地等),為無人機安全飛行起到了有力技術支持。
- 還沒有人留言評論。精彩留言會獲得點贊!