一種魚竿直度自動檢測篩分裝置的制作方法
本技術涉及魚竿直度檢測的,尤其是涉及一種魚竿直度自動檢測篩分裝置。
背景技術:
1、魚竿的直度是影響其性能穩定性的關鍵因素之一,傳統上,魚竿直度的檢測主要依賴人工目測或使用簡單的測量工具,這些方法不僅效率低下,而且難以保證檢測的準確性和一致性。
2、相關技術可參考公開號為cn116697936a的中國專利,公開了一種基于機器視覺的龍門式魚竿直度檢測裝置及其方法,其中,基于機器視覺的龍門式魚竿直度檢測裝置,至少包括:中央處理裝置、龍門裝卸裝置、攝像裝置、魚竿夾持裝置、基準標記裝置、光源設備和用于消除魚竿抖動的防抖裝置;中央處理裝置分別與龍門裝卸裝置、攝像裝置、魚竿夾持裝置、基準標記裝置、光源設備和防抖裝置通信。
3、針對上述中的相關技術,需要通過魚竿夾持裝置中的三爪卡盤對魚竿進行裝夾,檢測后根據魚竿合格與否分揀至合格品區和廢品區后,再重新進行夾取,檢測篩分效率低。
技術實現思路
1、為了方便對魚竿直度進行檢測并進行篩分,本技術提供一種魚竿直度自動檢測篩分裝置。
2、本技術提供一種魚竿直度自動檢測篩分裝置,采用如下的技術方案:
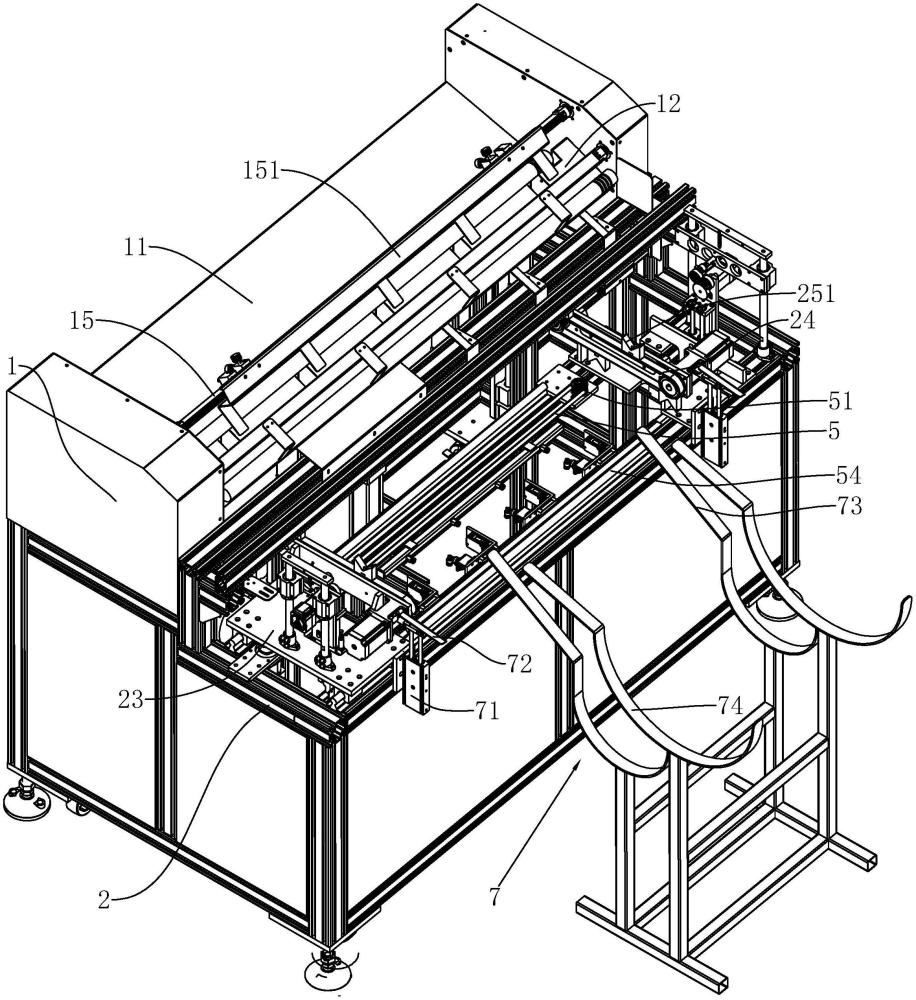
3、一種魚竿直度自動檢測篩分裝置,包括放料架、檢測架和篩分組件,所述檢測架位于放料架和篩分組件中間,所述檢測架上設置有兩個連接板,兩個所述連接板均設置有輸送帶,兩組所述輸送帶相互平行,兩組所述輸送帶上均安裝有若干位置相同的支撐座,兩個所述連接板上均設置有用于將魚竿進行轉動的轉動組件,所述檢測架上設置有位于兩組輸送帶下方的檢測組件,所述放料架上轉動連接有兩根位于放料板上方的擺臂橫梁,兩個所述擺臂橫梁沿輸送帶輸送方向依次設置,所述擺臂橫梁設置有擋料爪,所述篩分組件包括下料氣缸、下料板、高接料架和低接料架,所述下料氣缸安裝在檢測架靠近輸送帶輸出一端,所述下料板與下料氣缸活塞桿端部固定連接,所述下料氣缸活塞桿伸出時,下料板高度與輸送帶高度相對應,所述高接料架高度與下料氣缸活塞桿伸出時的下料板高度相對應,所述低接料架高度與下料氣缸活塞桿收回時的下料板高度相對應。
4、通過采用上述技術方案,擋料爪對放料板上的魚竿進行阻擋,通過擺臂橫梁轉動控制擋料爪的位置,方便將魚竿依次輸送至輸送帶的支撐座上,輸送帶運行,將魚竿輸送至轉動組件上方,轉動組件對魚竿進行轉動的同時,檢測組件對魚竿直度進行檢測,當魚竿直度符合標準時,下料氣缸活塞桿伸出,輸送帶運行將合格的魚竿輸送至高接料架,當魚竿直度不符合標準時,下料氣缸活塞桿收回,輸送帶運行將不合格的魚竿輸送至低接料架,提高魚竿在直度檢測過程中上下料的效率,方便對魚竿直度進行檢測并進行篩分。
5、可選的,所述放料架上傾斜設置有放料板,所述存料板沿輸送帶輸送方向向下傾斜,所述存料板高度低于放料板,所述存料板上開設有若干過板通口,所述放料架下方沿豎直方向設置有放料氣缸,所述放料氣缸活塞桿端部沿水平方向設置有支撐條,所述支撐條上設置有若干與過板通口一一對應的頂料板。
6、通過采用上述技術方案,將魚竿依次放在存料板上,啟動放料氣缸,放料氣缸的活塞桿伸出,支撐條帶動若干頂料板向上移動,頂料板從過板通口伸出,將存料板上的魚竿頂到放料板上,隨放料板輸送至輸送帶的支撐座上。
7、可選的,靠近存料板一側的擺臂橫梁上設置有擋料調整塊,所述擋料調整塊側面上穿設有調整桿,所述調整桿與擋料調整塊活動連接,所述調整桿一端與擋料爪固定連接,所述擋料調整塊上穿設有鎖緊桿,所述鎖緊桿與擋料調整塊螺紋連接,且所述鎖緊桿與調整桿相互配合。
8、通過采用上述技術方案,將鎖緊桿向遠離調整桿方向移動,將調整桿相對擋料調整塊進行移動,調整擺臂橫梁上擋料爪的位置,調整完成后,將鎖緊桿向調整桿方向移動,將調整桿鎖緊在擋料調整塊內,實現調整桿與擋料調整塊的相對固定。
9、可選的,所述放料架上設置有兩組驅動擺臂橫梁轉動的擺臂組件,兩組所述擺臂組件與兩根擺臂橫梁一一對應,所述擺臂組件包括兩個擺臂塊、第一擺臂板、軸承隨動器、第二擺臂板和擺臂氣缸,兩個所述擺臂塊安裝在擺臂橫梁兩端且與放料架轉動連接,所述第一擺臂板與其中一個擺臂塊固定連接,所述第一擺臂板遠離擺臂塊一端通過軸承隨動器與第二擺臂板連接,所述軸承隨動器兩端與第一擺臂板和第二擺臂板轉動連接,所述擺臂氣缸沿豎直方向安裝在放料架上,所述擺臂氣缸活塞桿與第二擺臂板固定連接。
10、通過采用上述技術方案,擺臂氣缸活塞桿伸出,第二擺臂板向上移動,通過軸承隨動器和第一擺臂板帶動擺臂塊轉動,從而使擋料爪向遠離放料板方向移動,擋料爪不對放料板上的魚竿進行阻擋,魚竿受重力影響在傾斜的放料板上移動,擺臂氣缸活塞桿回收,第二擺臂板向下移動,通過軸承隨動器和第一擺臂板帶動擺臂塊轉動,從而使擋料爪向靠近放料板方向移動,擋料爪對放料板上的魚竿進行阻擋。
11、可選的,所述檢測組件包括直線導軌、若干第一位移傳感器、兩個第二位移傳感器、若干移動板,若干所述第一位移傳感器與若干移動板一一對應,所述第一位移傳感器安裝在移動板上,所述移動板上安裝有與直線導軌相配合的第一滑塊,兩個所述第二位移傳感器分別安裝在兩個連接板上。
12、通過采用上述技術方案,根據魚竿長度調整移動板在直線導軌上的位置,從而對移動板上的第一位移傳感器位置進行調整,轉動組件將魚竿進行轉動,第一位移傳感器和第二位移傳感器檢測到魚竿的直線距離數據值,計算直線距離數據值之間的偏差值,從而對魚竿直度進行檢測,。
13、可選的,所述移動板上安裝有固定氣缸,所述固定氣缸活塞桿朝向直線導軌,所述固定氣缸活塞桿端部設置有緩沖膠頭。
14、通過采用上述技術方案,在對移動板在直線導軌上的位置進行調整時,固定氣缸活塞桿收回,當調整好移動板的位置后,啟動固定氣缸,固定氣缸活塞桿伸出,緩沖膠頭與直線導軌抵接,對移動板位置進行限位,提高移動板在直線導軌上的穩定性。
15、可選的,所述檢測架上設置有尼龍織帶,所述尼龍織帶一端與檢測架固定連接,尼龍織帶經過所有移動板的側面,若干所述移動板上設置有織帶壓塊,所述尼龍織帶通過織帶壓塊與移動板固定連接,且相鄰移動板之間的尼龍織帶長度一致。
16、通過采用上述技術方案,在對移動板位置調整后,相鄰移動板之間的尼龍織帶發生折疊,拉動活動一端的尼龍織帶,將尼龍織帶拉直,從而將移動板位置快速復位。
17、可選的,所述轉動組件包括舉升氣缸、滾輪支架、驅動電機、驅動輪和兩個隨動輪,所述舉升氣缸沿豎直方向安裝在連接板上,所述滾輪支架與舉升氣缸活塞桿端部固定連接,所述驅動電機安裝在滾輪支架上,所述驅動輪與驅動電機輸出軸同軸固定連接,兩個所述隨動輪均與連接板轉動連接,且兩個所述隨動輪與驅動輪相貼合。
18、通過采用上述技術方案,當魚竿移動至兩個隨動輪上方時,啟動舉升氣缸,舉升氣缸活塞桿伸出,滾輪支架向上移動,兩個隨動輪將魚竿進行支撐,啟動驅動電機,驅動電機輸出軸轉動帶動驅動輪轉動,帶動兩個隨動輪進行轉動,兩個隨動輪對魚竿支撐的同時帶動魚竿進行轉動。
19、可選的,所述連接板上沿豎直方向設置有兩根導向軸,兩根所述導向軸頂部設置有彈簧板,兩根所述導向軸上均穿設有導向座,所述導向座與導向軸滑動連接,兩個所述導向座上設置有安裝板,所述安裝板上轉動連接有輔助輪,所述彈簧板底部連接有拉伸彈簧,所述拉伸彈簧遠離彈簧板一端與安裝板連接。
20、通過采用上述技術方案,當魚竿位于兩個隨動輪上方時,在魚竿伴隨隨動輪向上移動,魚竿上端面與輔助輪下端面抵接,安裝板與拉伸彈簧連接,輔助輪對魚竿施加一定下壓力,在魚竿轉動時,輔助輪會伴隨魚竿轉動而轉動,提高魚竿轉動的穩定性。
21、可選的,所述檢測架上轉動連接有兩個同步帶輪,兩個所述同步帶輪上套接有同步帶,所述同步帶上設置有固定板,所述固定板與其中一個連接板底端固定連接,所述檢測架上設置有兩個橫向滑軌,兩個所述橫向滑軌位于同步帶兩側,兩個橫向滑軌上均設置有第二滑塊,兩個第二滑塊均與連接有固定板的連接板固定連接。
22、通過采用上述技術方案,轉動其中一個同步帶輪,同步帶移動帶動固定板進行移動,從而帶動與固定板連接的連接板進行移動,帶動連接板上的輸送帶進行移動,根據魚竿的長度規格對兩個連接板之間的距離進行調整,在連接板移動過程中,兩個第二滑塊沿橫向滑軌進行移動,提高連接板移動的穩定性。
23、綜上所述,本技術包括以下至少一種有益技術效果:
24、擋料爪對放料板上的魚竿進行阻擋,通過擺臂橫梁轉動控制擋料爪的位置,方便將魚竿依次輸送至輸送帶的支撐座上,輸送帶運行,將魚竿輸送至轉動組件上方,轉動組件對魚竿進行轉動的同時,檢測組件對魚竿直度進行檢測,當魚竿直度符合標準時,下料氣缸活塞桿伸出,輸送帶運行將合格的魚竿輸送至高接料架,當魚竿直度不符合標準時,下料氣缸活塞桿收回,輸送帶運行將不合格的魚竿輸送至低接料架,提高魚竿在直度檢測過程中上下料的效率,方便對魚竿直度進行檢測并進行篩分;
25、當魚竿移動至兩個隨動輪上方時,啟動舉升氣缸,舉升氣缸活塞桿伸出,滾輪支架向上移動,兩個隨動輪將魚竿進行支撐,啟動驅動電機,驅動電機輸出軸轉動帶動驅動輪轉動,帶動兩個隨動輪進行轉動,兩個隨動輪對魚竿支撐的同時,帶動魚竿進行轉動;
26、轉動其中一個同步帶輪,同步帶移動帶動固定板進行移動,從而帶動與固定板連接的連接板進行移動,帶動連接板上的輸送帶進行移動,根據魚竿的長度規格對兩個連接板之間的距離進行調整,在連接板移動過程中,兩個第二滑塊沿橫向滑軌進行移動,提高連接板移動的穩定性。
- 還沒有人留言評論。精彩留言會獲得點贊!