一種風機葉片覆冰檢測及控制方法、裝置、設備及介質
本技術涉及新能源設備檢測領域,特別涉及一種風機葉片覆冰檢測及控制方法、裝置、設備及介質。
背景技術:
1、在風力發電領域,風力發電機葉片覆冰問題一直是影響風機安全穩定運行和發電效率的關鍵因素。在寒冷氣候或高濕度環境下,風機葉片表面極易形成冰層,葉片覆冰會導致其氣動性能顯著下降,增加風機的負載,進而影響風機的輸出功率,嚴重時甚至可能引發風機故障,造成巨大的經濟損失。
2、傳統的風機葉片覆冰檢測方法存在諸多局限性。部分方法依賴人工巡檢,不僅效率低下,而且在惡劣天氣條件下難以實施,無法及時準確地發現覆冰情況;一些基于單一傳感器的檢測技術,如僅采用溫度傳感器或應變傳感器等,難以全面、精確、可靠地檢測葉片覆冰狀況及冰層厚度。
技術實現思路
1、有鑒于此,本技術的目的在于提供一種風機葉片覆冰檢測及控制方法、裝置、設備及介質,通過雷達與激光協同作用,能夠精準檢測葉片覆冰情況和冰層厚度,為風電場合理調控風機啟停提供有力支持。其具體方案如下:
2、第一方面,本技術提供了一種風機葉片覆冰檢測及控制方法,包括:
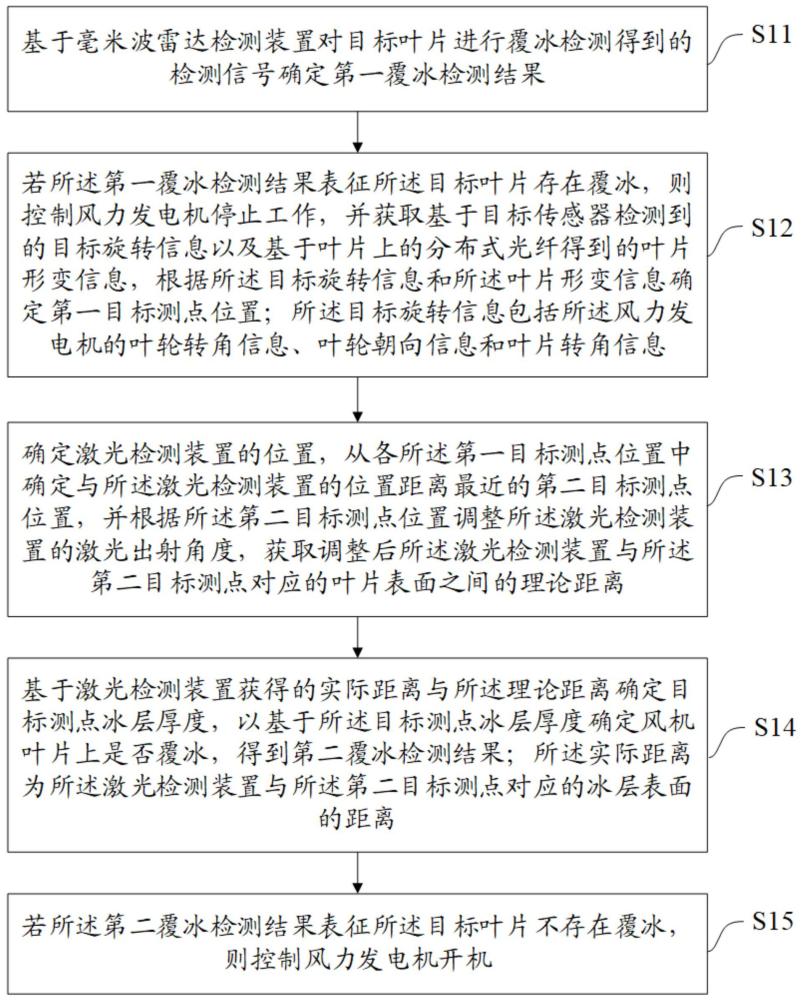
3、基于毫米波雷達檢測裝置對目標葉片進行覆冰檢測得到的檢測信號確定第一覆冰檢測結果;
4、若所述第一覆冰檢測結果表征所述目標葉片存在覆冰,則控制風力發電機停止工作,并獲取基于目標傳感器檢測到的目標旋轉信息以及基于葉片上的分布式光纖得到的葉片形變信息,根據所述目標旋轉信息和所述葉片形變信息確定第一目標測點位置;所述目標旋轉信息包括所述風力發電機的葉輪轉角信息、葉輪朝向信息和葉片轉角信息;
5、確定激光檢測裝置的位置,從各所述第一目標測點位置中確定與所述激光檢測裝置的位置距離最近的第二目標測點位置,并根據所述第二目標測點位置調整所述激光檢測裝置的激光出射角度,獲取調整后所述激光檢測裝置與所述第二目標測點對應的葉片表面之間的理論距離;
6、基于激光檢測裝置獲得的實際距離與所述理論距離確定目標測點冰層厚度,以基于所述目標測點冰層厚度確定風機葉片上是否覆冰,得到第二覆冰檢測結果;所述實際距離為所述激光檢測裝置與所述第二目標測點對應的冰層表面的距離;
7、若所述第二覆冰檢測結果表征所述目標葉片不存在覆冰,則控制風力發電機開機。
8、可選的,所述基于毫米波雷達檢測裝置對目標葉片進行覆冰檢測得到的檢測信號確定第一覆冰檢測結果,包括:
9、利用毫米波雷達檢測裝置對目標葉片進行覆冰檢測,以得到檢測信號;
10、對所述檢測信號進行信號處理操作,并將處理后的檢測信號與預設數據庫中的數據進行比對,以得到第一覆冰檢測結果。
11、可選的,所述獲取基于目標傳感器檢測到的目標旋轉信息以及基于葉片上的分布式光纖得到的葉片形變信息,根據所述目標旋轉信息和所述葉片形變信息確定第一目標測點位置,包括:
12、基于機艙上的第一目標傳感器確定所述風力發電機的葉輪轉角信息和葉輪朝向信息,并根據所述目標葉片上的第二目標傳感器確定所述風力發電機的葉片轉角信息;
13、基于所述葉輪轉角信息、所述葉輪朝向信息和所述葉片轉角信息確定所述目標葉片的葉片位置信息;
14、基于所述目標葉片上的分布式光纖確定葉片形變信息,并根據所述葉片形變信息和葉片原始尺寸信息得到目標葉片形狀信息;
15、根據所述葉片位置信息和所述目標葉片形狀信息確定各第一目標測點位置。
16、可選的,所述確定激光檢測裝置的位置,從各所述第一目標測點位置中確定與所述激光檢測裝置的位置距離最近的第二目標測點位置,并根據所述第二目標測點位置調整所述激光檢測裝置的激光出射角度,獲取調整后所述激光檢測裝置與所述第二目標測點對應的葉片表面之間的理論距離,包括:
17、確定當前激光檢測裝置的位置,從各所述第一目標測點位置中確定與所述當前激光檢測裝置的位置距離最近的預設數量個第二目標測點位置;
18、針對任一所述第二目標測點位置,根據所述第二目標測點位置調整當前激光檢測裝置的激光出射角度;
19、獲取調整后的當前激光檢測裝置與所述第二目標測點對應的葉片表面之間的理論距離。
20、可選的,所述根據所述第二目標測點位置調整當前激光檢測裝置的激光出射角度,包括:
21、基于所述第二目標測點位置與所述當前激光檢測裝置的位置確定目標相對方向矢量,并根據所述目標相對方向矢量控制可變支架轉動,以調整當前激光檢測裝置的激光出射角度;所述可變支架用于控制激光檢測裝置轉動。
22、可選的,所述基于激光檢測裝置獲得的實際距離與所述理論距離確定目標測點冰層厚度,包括:
23、針對任一所述第二目標測點位置對應的第二目標測點,確定與所述第二目標測點對應的調整后的激光檢測裝置檢測到的實際距離;
24、基于所述實際距離和所述第二目標測點對應的所述理論距離確定所述第二目標測點對應的目標測點冰層厚度,以得到各所述第二目標測點分別對應的目標測點冰層厚度。
25、可選的,所述風機葉片覆冰檢測及控制方法,還包括:
26、基于目標測點冰層厚度確定風力發電機葉片上是否覆冰以得到目標檢測結果;
27、若所述目標檢測結果表征葉片已覆冰,則繼續利用激光檢測裝置對所述風力發電機葉片上是否覆冰進行檢測,直至所述目標檢測結果表征葉片未覆冰;
28、若所述目標檢測結果表征葉片未覆冰,則輸出風機啟動信號,以控制所述風力發電機開機。
29、第二方面,本技術提供了一種風機葉片覆冰檢測及控制裝置,包括:
30、第一結果確定模塊,用于基于毫米波雷達檢測裝置對目標葉片進行覆冰檢測得到的檢測信號確定第一覆冰檢測結果;
31、位置確定模塊,用于若所述第一覆冰檢測結果表征所述目標葉片存在覆冰,則控制風力發電機停止工作,并獲取基于目標傳感器檢測到的目標旋轉信息以及基于葉片上的分布式光纖得到的葉片形變信息,根據所述目標旋轉信息和所述葉片形變信息確定第一目標測點位置;所述目標旋轉信息包括所述風力發電機的葉輪轉角信息、葉輪朝向信息和葉片轉角信息;
32、距離確定模塊,用于確定激光檢測裝置的位置,從各所述第一目標測點位置中確定與所述激光檢測裝置的位置距離最近的第二目標測點位置,并根據所述第二目標測點位置調整所述激光檢測裝置的激光出射角度,獲取調整后所述激光檢測裝置與所述第二目標測點對應的葉片表面之間的理論距離;
33、第二結果確定模塊,用于基于激光檢測裝置獲得的實際距離與所述理論距離確定目標測點冰層厚度,以基于所述目標測點冰層厚度確定風機葉片上是否覆冰,得到第二覆冰檢測結果;所述實際距離為所述激光檢測裝置與所述第二目標測點對應的冰層表面的距離;
34、控制模塊,用于若所述第二覆冰檢測結果表征所述目標葉片不存在覆冰,則控制風力發電機開機。
35、第三方面,本技術提供了一種電子設備,包括:
36、存儲器,用于保存計算機程序;
37、處理器,用于執行所述計算機程序,以實現前述的風機葉片覆冰檢測及控制方法。
38、第四方面,本技術提供了一種計算機可讀存儲介質,用于保存計算機程序,其中,所述計算機程序被處理器執行時實現前述的風機葉片覆冰檢測及控制方法。
39、本技術中,基于毫米波雷達檢測裝置對目標葉片進行覆冰檢測得到的檢測信號確定第一覆冰檢測結果;若所述第一覆冰檢測結果表征所述目標葉片存在覆冰,則控制風力發電機停止工作,并獲取基于目標傳感器檢測到的目標旋轉信息以及基于葉片上的分布式光纖得到的葉片形變信息,根據所述目標旋轉信息和所述葉片形變信息確定第一目標測點位置;所述目標旋轉信息包括所述風力發電機的葉輪轉角信息、葉輪朝向信息和葉片轉角信息;確定激光檢測裝置的位置,從各所述第一目標測點位置中確定與所述激光檢測裝置的位置距離最近的第二目標測點位置,并根據所述第二目標測點位置調整所述激光檢測裝置的激光出射角度,獲取調整后所述激光檢測裝置與所述第二目標測點對應的葉片表面之間的理論距離;基于激光檢測裝置獲得的實際距離與所述理論距離確定目標測點冰層厚度,以基于所述目標測點冰層厚度確定風機葉片上是否覆冰,得到第二覆冰檢測結果;所述實際距離為所述激光檢測裝置與所述第二目標測點對應的冰層表面的距離;若所述第二覆冰檢測結果表征所述目標葉片不存在覆冰,則控制風力發電機開機。由上可見,本技術首先基于毫米波雷達檢測裝置對目標葉片進行覆冰檢測,若檢測結果表征目標葉片存在覆冰,則控制風力發電機停止工作,同時,利用目標傳感器和風機葉片上的分布式光纖得到目標旋轉信息和葉片形變信息,進而確定第一目標測點位置;進一步的,確定激光檢測裝置的位置,并根據與激光檢測裝置的位置距離最近的第二目標測點位置調整激光檢測裝置的激光出射角度,以得到調整后的激光檢測裝置與第二目標測點對應的理論距離和實際距離,基于理論距離和實際距離確定目標測點冰層厚度,并根據目標測點冰層厚度得到第二覆冰檢測結果,以根據第二覆冰檢測結果判斷是否控制風力發電機開機。這樣一來,本技術通過毫米波雷達檢測裝置與激光檢測裝置協同作用,能夠精準檢測葉片覆冰情況和冰層厚度,使風電場合理調控風機啟停,以減少覆冰損害和經濟損失。
- 還沒有人留言評論。精彩留言會獲得點贊!