照準和視場信息采集裝置、光譜視場范圍確定方法及裝置
本發明涉及遙感,尤其涉及一種照準和視場信息采集裝置、光譜視場范圍確定方法及裝置。
背景技術:
1、非成像光譜采集技術在遙感應用領域具有重要作用。該技術通過采集地物在不同光譜波段上的能量反射特性,可用于地物識別、數據定標以及精度分析等多個方面。隨著技術發展,將非成像光譜儀搭載于無人機平臺進行數據采集逐漸成為一種重要的采集方式,這種方式不僅可以減少地面采集時的混雜光譜干擾,還能夠獲取更大范圍的采集數據。
2、目前,無人機搭載非成像光譜儀采集數據時,主要通過設定飛行航線和采集點位,在到達指定位置后進行懸停采集。采集過程中,通過地面控制站發送采集指令,觸發光譜儀獲取目標區域的光譜數據。為了輔助確定采集位置,部分系統會同步配備相機設備,在采集光譜的同時對目標區域進行拍照記錄。
3、然而,由于無人機飛行高度較高,且采集過程中存在姿態波動,操作人員與飛機存在高度和平面位置差異,使得地面操作人員難以準確判斷實際的光譜采集區域。特別是在進行側視采集時,目標區域定位的不確定性進一步增大,這導致采集得到的光譜數據可能并非預期目標區域的數據,降低了采集數據的可靠性和可控性。
技術實現思路
1、本發明提供一種照準和視場信息采集裝置、光譜視場范圍確定方法及裝置,有效解決了現有技術中由于無人機飛行高度較高且存在姿態波動導致難以準確判斷實際光譜采集區域的技術問題,提高了光譜數據采集的可靠性和可控性。
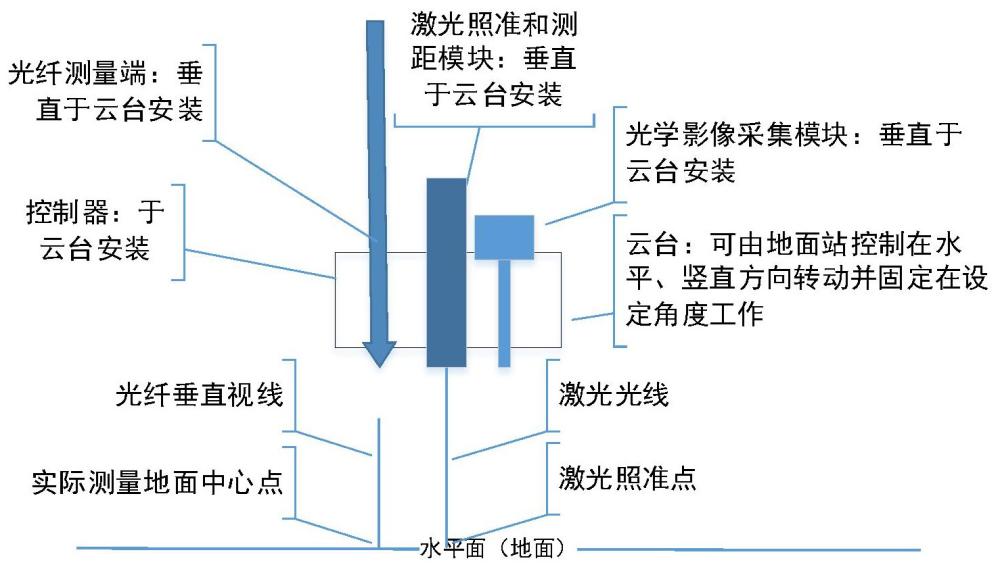
2、在本發明的第一方面,提供了一種照準和視場信息采集裝置,包括設置于云臺上的控制器、激光照準和測距模塊以及光學影像采集模塊;
3、所述控制器,用于響應無人機采集非成像光譜時觸發的起始信號,并生成控制信號;
4、所述激光照準和測距模塊,用于根據所述控制信號,發射激光于目光區域,以使無人機光譜儀光纖探頭根據所述目標區域生成的光斑照準所述目標區域;
5、所述光學影像采集模塊,用于根據所述控制信號采集所述目標區域的地面影像;
6、所述激光照準和測距模塊,還用于采集所述無人機光譜儀光纖探頭與所述目標區域之間的高度差,得到激光測距;
7、所述控制器,還用于將所述地面影像和所述激光測距作為視場信息。
8、在本發明的第二方面,提供了一種光譜視場范圍確定方法,包括:
9、獲取無人機采集非成像光譜時的視場信息,所述視場信息照準和視場信息采集裝置采集得到,包括目標區域的地面影像和所述無人機與所述目標區域之間的激光測距;
10、獲取所述無人機的采集模式,基于所述采集模式和所述視場信息確定光譜視場范圍。
11、在本發明的第三方面,提供了一種視場信息獲取模塊,用于獲取無人機采集非成像光譜時的視場信息,所述視場信息由照準和視場信息采集裝置采集得到,包括目標區域的地面影像和所述無人機與所述目標區域之間的激光測距;
12、視場范圍確定模塊,用于獲取所述無人機的采集模式,基于所述采集模式和所述視場信息確定光譜視場范圍。
13、在本發明的第四方面,提供了一種電子設備,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,所述處理器執行所述計算機程序時實現如上述任一種所述光譜現場范圍確定方法。
14、在本發明的第五方面,提供了一種非暫態計算機可讀存儲介質,其上存儲有計算機程序,該計算機程序被處理器執行時實現如上述任一種所述光譜現場范圍確定方法。
15、在本發明的第六方面,提供了一種計算機程序產品,包括計算機程序,所述計算機程序被處理器執行時實現如上述任一種所述光譜現場范圍確定方法。
16、綜上所述,本發明中提供的一個或多個技術方案,至少具有如下技術效果或優點:
17、通過控制器響應無人機采集非成像光譜時的起始信號并生成控制信號,激光照準和測距模塊根據控制信號在目標區域形成可見光斑,為地面操作人員提供直觀的照準參考,同時獲取無人機與目標區域之間的實際高度差,光學影像采集模塊根據控制信號采集目標區域的地面影像,控制器將地面影像和激光測距作為視場信息,從而實現對光譜采集區域的準確定位和視場信息記錄。上述技術方案通過激光照準提供實時可見的目標區域指示,結合高度測量和影像采集形成完整的視場信息,有效解決了現有技術中由于無人機飛行高度較高且存在姿態波動導致難以準確判斷實際光譜采集區域的技術問題,提高了光譜數據采集的可靠性。
技術特征:
1.一種照準和視場信息采集裝置,其特征在于,包括設置于云臺上的控制器、激光照準和測距模塊以及光學影像采集模塊;
2.根據權利要求1所述的照準和視場信息采集裝置,其特征在于,
3.一種光譜視場范圍確定方法,其特征在于,包括:
4.根據權利要求3所述的光譜視場范圍確定方法,其特征在于,所述獲取所述無人機光譜的采集模式,包括:
5.根據權利要求3所述的光譜現場范圍確定方法,其特征在于,所述基于所述采集模式和所述視場信息確定光譜視場范圍,包括:
6.根據權利要求5所述的光譜現場范圍確定方法,其特征在于,所述根據所述視場圓半徑、所述中心點以及所述影像空間分辨率,確定光譜視場范圍,包括:
7.一種光譜現場范圍確定裝置,其特征在于,包括:
8.一種電子設備,包括存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,其特征在于,所述處理器執行所述計算機程序時實現如權利要求3至6任一項所述光譜現場范圍確定方法。
9.一種非暫態計算機可讀存儲介質,其上存儲有計算機程序,其特征在于,所述計算機程序被處理器執行時實現如權利要求3至6任一項所述光譜現場范圍確定方法。
10.一種計算機程序產品,包括計算機程序,其特征在于,所述計算機程序被處理器執行時實現如權利要求3至6任一項所述光譜現場范圍確定方法。
技術總結
一種照準和視場信息采集裝置、光譜視場范圍確定方法及裝置,涉及遙感技術領域。其中,照準和視場信息采集裝置,包括設置于云臺上的控制器、激光照準和測距模塊以及光學影像采集模塊;其中,控制器,用于響應無人機采集非成像光譜時觸發的起始信號,并生成控制信號;激光照準和測距模塊,用于根據控制信號,發射激光于目光區域;所述光學影像采集模塊,用于根據控制信號采集所述目標區域的地面影像;所述激光照準和測距模塊,還用于采集無人機與所述目標區域之間的高度差,得到激光測距;所述控制器,還用于將地面影像和所述激光測距作為視場信息。實施本發明提供的技術方案,可以提高光譜數據采集的可靠性。
技術研發人員:李儒,楊宏,張霞,潘潔,鄧飚,徐進勇
受保護的技術使用者:中國科學院空天信息創新研究院
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!