激光點(diǎn)云數(shù)據(jù)處理方法、裝置、設(shè)備和存儲(chǔ)介質(zhì)與流程
本發(fā)明涉及激光雷達(dá),具體而言,涉及一種激光點(diǎn)云數(shù)據(jù)處理方法、裝置、設(shè)備和存儲(chǔ)介質(zhì)。
背景技術(shù):
1、激光雷達(dá)具備測(cè)量精度高的優(yōu)點(diǎn),是一種通過發(fā)射激光束并處理返回的激光能量,來獲取周圍環(huán)境信息的測(cè)量器件,其測(cè)量精度通常可以達(dá)到厘米級(jí),甚至毫米級(jí)。這種高精度使得激光雷達(dá)在無(wú)人駕駛、機(jī)器人導(dǎo)航、地形測(cè)繪等領(lǐng)域具備很高的應(yīng)用價(jià)值。
2、但是,激光雷達(dá)發(fā)出的激光光束與場(chǎng)景物體相互作用之后,例如,經(jīng)場(chǎng)景物體反射或散射后,激光雷達(dá)會(huì)接收到經(jīng)場(chǎng)景物體作用后返回的激光能量,這些激光能量會(huì)在激光雷達(dá)的接收單元上形成一個(gè)光斑。而這個(gè)光斑中不僅包含主光斑,而且還包含雜散光斑。雜散光斑的存在會(huì)導(dǎo)致相應(yīng)的點(diǎn)云圖像中物體邊緣存在膨脹現(xiàn)象。
技術(shù)實(shí)現(xiàn)思路
1、有鑒于此,為至少解決因雜散光斑的存在,而導(dǎo)致激光雷達(dá)的點(diǎn)云圖像中物體在垂直方向上的邊緣存在膨脹現(xiàn)象的技術(shù)問題,本發(fā)明的目的在于提供一種激光點(diǎn)云數(shù)據(jù)處理方法、裝置、設(shè)備和存儲(chǔ)介質(zhì)。
2、為了實(shí)現(xiàn)上述目的,本發(fā)明實(shí)施例采用的技術(shù)方案如下:
3、本發(fā)明實(shí)施例的第一方面,提供了一種激光點(diǎn)云數(shù)據(jù)處理方法,
4、用于對(duì)激光雷達(dá)接收到的數(shù)據(jù)進(jìn)行處理,所述激光雷達(dá)的接收單元包括沿垂向依次間隔設(shè)置的多個(gè)第一冗余傳感器、多個(gè)目標(biāo)傳感器和多個(gè)第二冗余傳感器;所述多個(gè)目標(biāo)傳感器中與所述第一冗余傳感器鄰近的第一設(shè)定數(shù)量個(gè)目標(biāo)傳感器、和所述多個(gè)第一冗余傳感器各自對(duì)應(yīng)的接收通道形成上邊緣通道組;所述多個(gè)目標(biāo)傳感器中與所述第二冗余傳感器鄰近的第二設(shè)定數(shù)量個(gè)目標(biāo)傳感器、和所述多個(gè)第二冗余傳感器各自對(duì)應(yīng)的接收通道形成下邊緣通道組;剩余的目標(biāo)傳感器對(duì)應(yīng)的接收通道形成中部通道組;
5、所述方法包括:
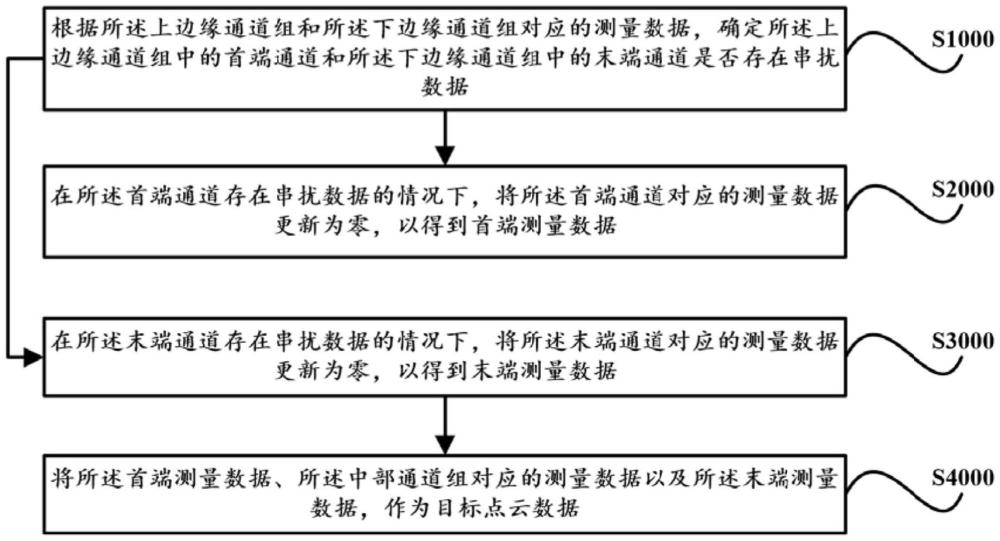
6、根據(jù)所述上邊緣通道組和所述下邊緣通道組對(duì)應(yīng)的測(cè)量數(shù)據(jù),確定所述上邊緣通道組中的首端通道和所述下邊緣通道組中的末端通道是否存在串?dāng)_數(shù)據(jù);其中,所述首端通道為所述上邊緣通道組中,與所述第一冗余傳感器距離最近的一目標(biāo)傳感器對(duì)應(yīng)的接收通道,所述末端通道為所述下邊緣通道組中,與所述第二冗余傳感器距離最近的一目標(biāo)傳感器對(duì)應(yīng)的接收通道;
7、在所述首端通道存在串?dāng)_數(shù)據(jù)的情況下,將所述首端通道對(duì)應(yīng)的測(cè)量數(shù)據(jù)更新為零,以得到首端測(cè)量數(shù)據(jù);
8、在所述末端通道存在串?dāng)_數(shù)據(jù)的情況下,將所述末端通道對(duì)應(yīng)的測(cè)量數(shù)據(jù)更新為零,以得到末端測(cè)量數(shù)據(jù);
9、將所述首端測(cè)量數(shù)據(jù)、所述中部通道組對(duì)應(yīng)的測(cè)量數(shù)據(jù)以及所述末端測(cè)量數(shù)據(jù),作為目標(biāo)點(diǎn)云數(shù)據(jù)。
10、在可選的實(shí)施方式中,所述測(cè)量數(shù)據(jù)包括距離值和反射率值;所述反射率值用于確定接收通道對(duì)應(yīng)的反射率等級(jí);
11、在一幀完整的點(diǎn)云圖像基于一幀測(cè)量數(shù)據(jù)形成的情況下,所述根據(jù)所述上邊緣通道組和所述下邊緣通道組對(duì)應(yīng)的測(cè)量數(shù)據(jù),確定所述上邊緣通道組中的首端通道和所述下邊緣通道組中的末端通道是否存在串?dāng)_數(shù)據(jù)的步驟,包括:
12、在所述上邊緣通道組中各通道各自對(duì)應(yīng)的距離值屬于設(shè)定的距離范圍內(nèi)、且所述上邊緣通道組中各通道各自對(duì)應(yīng)的反射率等級(jí)為各自對(duì)應(yīng)的設(shè)定反射率等級(jí)的情況下,確定所述上邊緣通道組中的首端通道存在串?dāng)_數(shù)據(jù);
13、在所述下邊緣通道組中各通道各自對(duì)應(yīng)的距離值屬于設(shè)定的距離范圍內(nèi)、且所述下邊緣通道組中各通道各自對(duì)應(yīng)的反射率等級(jí)為各自對(duì)應(yīng)的設(shè)定反射率等級(jí)的情況下,確定所述下邊緣通道組中的末端通道存在串?dāng)_數(shù)據(jù)。
14、在可選的實(shí)施方式中,所述測(cè)量數(shù)據(jù)包括距離值和反射率值;所述反射率值用于確定接收通道對(duì)應(yīng)的反射率等級(jí);
15、在一幀完整的點(diǎn)云圖像基于連續(xù)的多幀測(cè)量數(shù)據(jù)沿垂直方向依次拼接形成的情況下,所述根據(jù)所述上邊緣通道組和所述下邊緣通道組對(duì)應(yīng)的測(cè)量數(shù)據(jù),確定所述上邊緣通道組中的首端通道和所述下邊緣通道組中的末端通道是否存在串?dāng)_數(shù)據(jù)的步驟,包括:
16、對(duì)于所述多幀測(cè)量數(shù)據(jù)中第一幀測(cè)量數(shù)據(jù),在所述上邊緣通道組中各通道各自對(duì)應(yīng)的第一幀距離值屬于設(shè)定的距離范圍內(nèi)、且所述上邊緣通道組中各通道各自對(duì)應(yīng)的第一幀反射率等級(jí)為各自對(duì)應(yīng)的設(shè)定反射率等級(jí)的情況下,確定所述上邊緣通道組中的首端通道對(duì)應(yīng)的第一幀測(cè)量數(shù)據(jù)中存在串?dāng)_數(shù)據(jù);
17、對(duì)于所述多幀測(cè)量數(shù)據(jù)中最后一幀測(cè)量數(shù)據(jù),在所述下邊緣通道組中各通道各自對(duì)應(yīng)的最后一幀距離值屬于設(shè)定的距離范圍內(nèi)、且所述下邊緣通道組中各通道各自對(duì)應(yīng)的最后一幀反射率等級(jí)為各自對(duì)應(yīng)的設(shè)定反射率等級(jí)的情況下,確定所述下邊緣通道組中的末端通道對(duì)應(yīng)的最后一幀測(cè)量數(shù)據(jù)中存在串?dāng)_數(shù)據(jù);
18、對(duì)于除了所述最后一幀測(cè)量數(shù)據(jù)以外的每一當(dāng)前處理幀測(cè)量數(shù)據(jù),在所述下邊緣通道組中各通道各自對(duì)應(yīng)的當(dāng)前處理幀距離值和所述上邊緣通道組中各通道各自對(duì)應(yīng)的下一幀距離值屬于設(shè)定的距離范圍內(nèi)、且所述下邊緣通道組中各通道各自對(duì)應(yīng)的當(dāng)前處理幀反射率等級(jí)和所述上邊緣通道組中各通道各自對(duì)應(yīng)的下一幀反射率等級(jí)為各自對(duì)應(yīng)的設(shè)定反射率等級(jí)的情況下,確定所述末端通道對(duì)應(yīng)的當(dāng)前處理幀測(cè)量數(shù)據(jù)中存在串?dāng)_數(shù)據(jù);
19、對(duì)于除了所述第一幀測(cè)量數(shù)據(jù)以外的每一當(dāng)前處理幀測(cè)量數(shù)據(jù),在所述上邊緣通道組中各通道各自對(duì)應(yīng)的當(dāng)前處理幀距離值和所述下邊緣通道組中各通道各自對(duì)應(yīng)的上一幀距離值屬于各自設(shè)定的距離范圍內(nèi)、且所述上邊緣通道組中各通道各自對(duì)應(yīng)的當(dāng)前處理幀反射率等級(jí)和所述下邊緣通道組中各通道各自對(duì)應(yīng)的上一幀反射率等級(jí)為各自對(duì)應(yīng)的設(shè)定反射率等級(jí)的情況下,確定所述首端通道接對(duì)應(yīng)的當(dāng)前處理幀測(cè)量數(shù)據(jù)中存在串?dāng)_數(shù)據(jù)。
20、在可選的實(shí)施方式中,不同接收通道的通道號(hào)互不相同;所述上邊緣通道組、所述中部通道組和所述下邊緣通道組中,各通道對(duì)應(yīng)的測(cè)量數(shù)據(jù)的獲取過程包括:
21、獲取與所有接收通道當(dāng)前輸出的采集數(shù)據(jù)對(duì)應(yīng)的目標(biāo)棱面;
22、根據(jù)預(yù)存的棱面校準(zhǔn)表,確定各接收通道對(duì)應(yīng)于所述目標(biāo)棱面的通道校準(zhǔn)值;其中,所述棱面校準(zhǔn)表存儲(chǔ)有激光雷達(dá)的棱鏡中各棱面與各接收通道之間的通道校準(zhǔn)值;
23、對(duì)于各接收通道,根據(jù)所述接收通道對(duì)應(yīng)于所述目標(biāo)棱面的通道校準(zhǔn)值,對(duì)所述接收通道的通道號(hào)進(jìn)行更新;
24、對(duì)于所述上邊緣通道組、所述中部通道組和所述下邊緣通道組中各通道,將所述通道更新后的通道號(hào)對(duì)應(yīng)的原始通道收到的測(cè)量數(shù)據(jù),作為所述通道的測(cè)量數(shù)據(jù)。
25、在可選的實(shí)施方式中,在所述目標(biāo)棱面為平面的情況下,所述根據(jù)所述接收通道對(duì)應(yīng)于所述目標(biāo)棱面的通道校準(zhǔn)值,對(duì)所述接收通道的通道號(hào)進(jìn)行更新的步驟,包括:
26、將所述接收通道的通道號(hào)更新為所述接收通道的原始通道號(hào)與其對(duì)應(yīng)的通道校準(zhǔn)值的差值;
27、其中,在所述目標(biāo)棱面與激光雷達(dá)的電機(jī)旋轉(zhuǎn)軸之間的尖塔差為正值的情況下,各接收通道對(duì)應(yīng)于所述目標(biāo)棱面的通道校準(zhǔn)值均為正值;在所述目標(biāo)棱面與所述電機(jī)旋轉(zhuǎn)軸之間的尖塔差為負(fù)值的情況下,各接收通道對(duì)應(yīng)于所述目標(biāo)棱面的通道校準(zhǔn)值均為負(fù)值;在所述目標(biāo)棱面與所述電機(jī)旋轉(zhuǎn)軸之間不存在尖塔差的情況下,各接收通道對(duì)應(yīng)于所述目標(biāo)棱面的通道校準(zhǔn)值均為零。
28、在可選的實(shí)施方式中,
29、在所述目標(biāo)棱面為曲面的情況下,所述棱面校準(zhǔn)表還存儲(chǔ)有所述棱鏡中各棱面所在的不同角度范圍與各接收通道之間的通道校準(zhǔn)值;
30、所述獲取與所有接收通道當(dāng)前輸出的采集數(shù)據(jù)對(duì)應(yīng)的目標(biāo)棱面的步驟,包括:
31、根據(jù)所述點(diǎn)云數(shù)據(jù)對(duì)應(yīng)的電機(jī)角度,確定對(duì)應(yīng)的目標(biāo)棱面以及所述目標(biāo)棱面所在的角度位置;
32、所述根據(jù)預(yù)存的棱面校準(zhǔn)表,確定各接收通道對(duì)應(yīng)于所述目標(biāo)棱面的通道校準(zhǔn)值的步驟,包括:
33、根據(jù)所述目標(biāo)棱面所在的角度位置,確定所述目標(biāo)棱面在所述棱面校準(zhǔn)表中對(duì)應(yīng)的目標(biāo)角度范圍;
34、根據(jù)所述目標(biāo)棱面的棱面校準(zhǔn)表,確定各接收通道對(duì)應(yīng)于所述目標(biāo)角度范圍的通道校準(zhǔn)值。
35、在可選的實(shí)施方式中,所述不同角度范圍包括用于表征棱面與激光雷達(dá)的電機(jī)旋轉(zhuǎn)軸之間存在正尖塔差的多個(gè)第一角度范圍、用于表征棱面與激光雷達(dá)的電機(jī)旋轉(zhuǎn)軸之間不存在尖塔差的基準(zhǔn)角度范圍、以及用于表征棱面與激光雷達(dá)的電機(jī)旋轉(zhuǎn)軸之間存在負(fù)尖塔差的多個(gè)第二角度范圍;不同第一角度范圍表征不同大小的正尖塔差,不同第二角度范圍表征不同大小的負(fù)尖塔差;
36、所述根據(jù)所述接收通道對(duì)應(yīng)于所述目標(biāo)棱面的通道校準(zhǔn)值,對(duì)所述接收通道的通道號(hào)進(jìn)行更新的步驟,包括:
37、將所述接收通道的通道號(hào)更新為所述接收通道的原始通道號(hào)與所述目標(biāo)角度范圍對(duì)應(yīng)的通道校準(zhǔn)值的差值;
38、其中,在所述目標(biāo)角度范圍為所述第一角度范圍的情況下,所述校準(zhǔn)值為正值,且所述校準(zhǔn)值的大小與所述正尖塔差的大小呈正相關(guān)關(guān)系;在所述目標(biāo)角度范圍為所述基準(zhǔn)角度范圍的情況下,所述校準(zhǔn)值為零;在所述目標(biāo)角度范圍為所述第二角度范圍的情況下,所述校準(zhǔn)值為負(fù)值,且所述校準(zhǔn)值的絕對(duì)值的大小與所述負(fù)尖塔差的大小呈正相關(guān)關(guān)系。。
39、本發(fā)明實(shí)施例的第二方面,提供了一種激光點(diǎn)云數(shù)據(jù)處理裝置,用于對(duì)激光雷達(dá)接收到的數(shù)據(jù)進(jìn)行處理,所述激光雷達(dá)的接收單元包括沿垂向依次間隔設(shè)置的多個(gè)第一冗余傳感器、多個(gè)目標(biāo)傳感器和多個(gè)第二冗余傳感器;所述多個(gè)目標(biāo)傳感器中與所述第一冗余傳感器鄰近的第一設(shè)定數(shù)量個(gè)目標(biāo)傳感器、和所述多個(gè)第一冗余傳感器各自對(duì)應(yīng)的接收通道形成上邊緣通道組;所述多個(gè)目標(biāo)傳感器中與所述第二冗余傳感器鄰近的第二設(shè)定數(shù)量個(gè)目標(biāo)傳感器、和所述多個(gè)第二冗余傳感器各自對(duì)應(yīng)的接收通道形成下邊緣通道組;剩余的目標(biāo)傳感器對(duì)應(yīng)的接收通道形成中部通道組;
40、所述裝置包括:
41、串?dāng)_確定模塊,被配置為:根據(jù)所述上邊緣通道組和所述下邊緣通道組對(duì)應(yīng)的測(cè)量數(shù)據(jù),確定所述上邊緣通道組中的首端通道和所述下邊緣通道組中的末端通道是否存在串?dāng)_數(shù)據(jù);其中,所述首端通道為所述上邊緣通道組中,與所述第一冗余傳感器距離最近的一目標(biāo)傳感器對(duì)應(yīng)的接收通道,所述末端通道為所述下邊緣通道組中,與所述第二冗余傳感器距離最近的一目標(biāo)傳感器對(duì)應(yīng)的接收通道;
42、數(shù)據(jù)更新模塊,被配置為:在所述首端通道存在串?dāng)_數(shù)據(jù)的情況下,將所述首端通道對(duì)應(yīng)的測(cè)量數(shù)據(jù)更新為零,以得到首端測(cè)量數(shù)據(jù);在所述末端通道存在串?dāng)_數(shù)據(jù)的情況下,將所述末端通道對(duì)應(yīng)的測(cè)量數(shù)據(jù)更新為零,以得到末端測(cè)量數(shù)據(jù);
43、目標(biāo)點(diǎn)云數(shù)據(jù)獲取模塊,被配置為:將所述首端測(cè)量數(shù)據(jù)、所述中部通道組對(duì)應(yīng)的測(cè)量數(shù)據(jù)以及所述末端測(cè)量數(shù)據(jù),作為目標(biāo)點(diǎn)云數(shù)據(jù)。
44、本發(fā)明實(shí)施例的第三方面,提供了一種電子設(shè)備,包括處理器和存儲(chǔ)器,所述存儲(chǔ)器存儲(chǔ)有能夠被所述處理器執(zhí)行的機(jī)器可執(zhí)行指令,所述處理器可執(zhí)行所述機(jī)器可執(zhí)行指令以實(shí)現(xiàn)上述第一方面提供的激光點(diǎn)云數(shù)據(jù)處理方法。
45、本發(fā)明實(shí)施例的第四方面,提供了一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),其上存儲(chǔ)有計(jì)算機(jī)程序,所述計(jì)算機(jī)程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)上述第一方面提供的激光點(diǎn)云數(shù)據(jù)處理方法。
46、本發(fā)明實(shí)施例提供的激光點(diǎn)云數(shù)據(jù)處理方法、裝置、設(shè)備和存儲(chǔ)介質(zhì),通過針對(duì)膨脹現(xiàn)象在垂直方向上較為明顯地出現(xiàn)在點(diǎn)云圖像中目標(biāo)物體的上邊緣和下邊緣的特性,將目標(biāo)物體上邊緣和下邊緣處的數(shù)據(jù)相關(guān)的傳感器對(duì)應(yīng)的接收通道劃分為上邊緣通道組和下邊緣通道組,并基于上邊緣通道組和下邊緣通道組的測(cè)量數(shù)據(jù)來判定與上邊緣成像相關(guān)的首端通道、以及與下邊緣成像相關(guān)的某端通道中是否存在串?dāng)_數(shù)據(jù),如果存在串?dāng)_數(shù)據(jù),則表示會(huì)引起膨脹現(xiàn)象,在此情況下,通過將存在串?dāng)_數(shù)據(jù)的首端通道和末端通道各自對(duì)應(yīng)的測(cè)量數(shù)據(jù)均更新為零,實(shí)現(xiàn)對(duì)首端通道和末端通道的測(cè)量數(shù)據(jù)進(jìn)行無(wú)效標(biāo)記,由此可以解決首端通道和末端通道的串?dāng)_數(shù)據(jù)所引起的點(diǎn)云圖像上邊緣和下邊緣膨脹的問題,進(jìn)而使得目標(biāo)物體的尺寸測(cè)量更加精確,并有利于提升圖像質(zhì)量。
47、為使本發(fā)明的上述目的、特征和優(yōu)點(diǎn)能更明顯易懂,下文特舉較佳實(shí)施例,并配合所附附圖,作詳細(xì)說明如下。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!