一種基于動作捕捉的室內飛行無人機定位方法、裝置、設備及存儲介質
本發明涉及無人機,特別是涉及一種基于動作捕捉的室內飛行無人機定位方法、裝置、設備及存儲介質。
背景技術:
1、傳統的無人機大多依賴于全球衛星導航系統(gnss)進行定位和導航,這在室外開闊環境中表現出色,但在室內環境中卻面臨諸多挑戰。由于室內環境的復雜性,如建筑物遮擋、信號干擾等因素,gnss信號往往無法穩定接收,導致室內無人機的定位精度和飛行穩定性大大降低。
技術實現思路
1、本發明所要解決的技術問題是,克服現有技術的缺點,提供一種基于動作捕捉的室內飛行無人機定位方法、裝置、設備及存儲介質。
2、為了解決以上技術問題,本發明的技術方案如下:
3、一種基于動作捕捉的室內飛行無人機定位方法,包括:
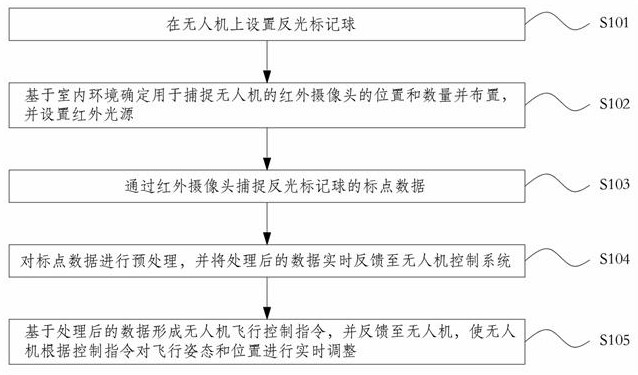
4、在無人機上設置反光標記球;
5、基于室內環境確定用于捕捉無人機的紅外攝像頭的位置和數量并布置,并設置紅外光源;
6、通過所述紅外攝像頭捕捉反光標記球的標點數據;
7、對所述標點數據進行預處理,并將處理后的數據實時反饋至無人機控制系統;
8、基于處理后的數據形成無人機飛行控制指令,并反饋至無人機,使無人機根據控制指令對飛行姿態和位置進行實時調整。
9、作為本發明所述基于動作捕捉的室內飛行無人機定位方法的一種優選方案,其中:所述反光標記球的數量為若干個,且若干個所述反光標記球圍成穩定的幾何形狀。
10、作為本發明所述基于動作捕捉的室內飛行無人機定位方法的一種優選方案,其中:所述反光標記球的數量為三個,且三個所述反光標記球呈三角形布設。
11、作為本發明所述基于動作捕捉的室內飛行無人機定位方法的一種優選方案,其中:對所述標點數據進行預處理包括:
12、將所有攝像頭捕捉到的標點數據進行融合處理。
13、作為本發明所述基于動作捕捉的室內飛行無人機定位方法的一種優選方案,其中:在所述將所有攝像頭捕捉到的標點數據進行融合處理之后,還包括:
14、采用自適應濾波算法和智能去噪算法對融合處理后的所述標點數據進行預處理。
15、作為本發明所述基于動作捕捉的室內飛行無人機定位方法的一種優選方案,其中:所述紅外光源的光照強度和波長均可調。
16、本發明還提供了一種基于動作捕捉的室內飛行無人機定位裝置,包括:
17、數據獲取模塊,用于通過紅外攝像頭捕捉反光標記球的標點數據;
18、數據處理模塊,用于對所述標點數據進行預處理,并將處理后的數據實時反饋至無人機控制系統;
19、無人機控制模塊,用于基于處理后的數據形成無人機飛行控制指令,并反饋至無人機,使無人機根據控制指令對飛行姿態和位置進行實時調整。
20、本發明還提供了一種計算機設備,包括存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,所述處理器執行所述程序時實現如上述任一項基于動作捕捉的室內飛行無人機定位方法所述的方法。
21、本發明還提供了一種計算機可讀存儲介質,其上存儲有計算機程序,其特征在于:所述程序被處理器執行時實現如任一項基于動作捕捉的室內飛行無人機定位方法所述的方法。
22、本發明的有益效果是:
23、(1)本發明通過在無人機上布置強反光特性的反光標記球,并利用紅外攝像頭進行捕捉,能夠實現對無人機的精準定位,這種定位方式不受室內環境光線變化的影響,能夠在各種光照條件下保持穩定的捕捉效果。
24、(2)本發明采用多個紅外攝像頭進行捕捉,并通過圖像處理和計算機視覺算法對數據進行融合處理,提高了系統的可靠性和準確性,即使某個攝像頭出現故障或受到干擾,其他攝像頭仍能繼續工作,確保系統的正常運行。
25、(3)本發明引入光照強度和波長均可調的紅外光源,能夠根據室內光照條件和攝像頭性能實時調整光源強度和波長,確保反光標記球反射信號的清晰度和穩定性,這種自適應調整機制增強了系統的適應性,使其能夠在各種室內環境中穩定運行。
技術特征:
1.一種基于動作捕捉的室內飛行無人機定位方法,其特征在于:包括:
2.根據權利要求1所述的基于動作捕捉的室內飛行無人機定位方法,其特征在于:所述反光標記球的數量為若干個,且若干個所述反光標記球圍成穩定的幾何形狀。
3.根據權利要求2所述的基于動作捕捉的室內飛行無人機定位方法,其特征在于:所述反光標記球的數量為三個,且三個所述反光標記球呈三角形布設。
4.根據權利要求1所述的基于動作捕捉的室內飛行無人機定位方法,其特征在于:對所述標點數據進行預處理包括:
5.根據權利要求1所述的基于動作捕捉的室內飛行無人機定位方法,其特征在于:在所述將所有攝像頭捕捉到的標點數據進行融合處理之后,還包括:
6.根據權利要求1所述的基于動作捕捉的室內飛行無人機定位方法,其特征在于:所述紅外光源的光照強度和波長均可調。
7.一種基于權利要求1~6任一項所述的基于動作捕捉的室內飛行無人機定位裝置,其特征在于:包括:
8.一種計算機設備,包括存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,其特征在于:所述處理器執行所述程序時實現如權利要求1~6中任一項所述的方法。
9.一種計算機可讀存儲介質,其上存儲有計算機程序,其特征在于:所述程序被處理器執行時實現如權利要求1~6中任一項所述的方法。
技術總結
本發明公開了一種基于動作捕捉的室內飛行無人機定位方法,涉及無人機技術領域,包括:在無人機上設置反光標記球;基于室內環境確定用于捕捉無人機的紅外攝像頭的位置和數量并布置,并設置紅外光源;通過所述紅外攝像頭捕捉反光標記球的標點數據;對所述標點數據進行預處理,并將處理后的數據實時反饋至無人機控制系統;基于處理后的數據形成無人機飛行控制指令,并反饋至無人機,使無人機根據控制指令對飛行姿態和位置進行實時調整。本發明通過在無人機上布置強反光特性的反光標記球,并利用紅外攝像頭進行捕捉,能夠實現對無人機的精準定位,這種定位方式不受室內環境光線變化的影響,能夠在各種光照條件下保持穩定的捕捉效果。
技術研發人員:高拓,郁鐳
受保護的技術使用者:南京機電職業技術學院
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!