一種基于浮動平臺的測風激光雷達風場反演優化方法、系統、設備和介質與流程
本發明涉及一種基于浮動平臺的測風激光雷達風場反演優化方法、系統、設備和介質,屬于遙感海洋環境監測。
背景技術:
1、由于船、浮標等海上浮動平臺受到浪涌的影響,導致安裝在浮動平臺的激光雷達測量時激光光束的指向與設定方向出現偏差,引起測量風速、風向偏差,需要對激光雷達相對于大地的空間出光角度進行校正,而校正后的徑向光束俯仰角偏差導致光束在空間上分布起伏不均勻,各個方位角上的徑向波束俯仰角與目標風場俯仰角存在偏差。徑向波束1度的俯仰角偏差,在5km徑向距離處高度差可達到90米,10km徑向距離處高度差可達到180米左右,最終導致水平風場反演誤差較大,俯仰角偏差越大,距離激光雷達越遠,波動高度越大,反演的水平風場誤差越大。因此需要對浮動平臺上的校正后波束造成的高度差進行校正。
2、目前姿態校正算法比較成熟,主要是通過空間坐標系的轉換,將雷達波束相對于浮動平臺坐標系的空間角度校正為相對于大地坐標系的空間角度。浮動平臺坐標系的搖擺角可通過安裝慣性導航系統進行測量。
3、進一步地,若想對高度差進行校正,需要一個參考的真實風速,目前還沒有可以參考的資料,可以通過安裝在激光雷達附近的浮動平臺的原位式的風速傳感器進行測量,一般是采用風速計和風向標或者超聲風速計,由于原位測風儀器是測量單點的,無法反演水平風場,但是校正方法簡單,受姿態的影響較小。通過測量單點的真實風速,計算真實風速在各個波束方位角的徑向速度,與實測風速的差距可作為一個初步的高度風速波動系數。
4、由于其他高度和距離沒有原位儀器,直接用高度風速波動系數校正整個風場,也會存在一定的誤差,需要修正高度風速波動系數。因此在ppi掃描的基礎上再疊加一個rhi掃描。由于rhi掃描是垂直面上的掃描,因此浮動平臺在搖擺過程中,只要搖擺角度在這個rhi的俯仰角掃描范圍內,就可以獲得目標風場俯仰角的實測徑向,用這個實測徑向來對波動系數進行修正,迭代后可獲取更精確的徑向速度,并進一步反演水平風場。
技術實現思路
1、針對上述問題,本發明的目的是提供一種基于浮動平臺的測風激光雷達風場反演優化方法、系統、設備和介質,該方法基于漂浮式平臺的多普勒測風激光雷達,在ppi掃描模式下,通過原位式測風傳感器對第一距離庫進行校正,計算可用于修正高度偏差的波動系數,同時結合rhi掃描模式,對波動系數進行進一步迭代修正,獲取整個風場的更精確的徑向速度,進而進行整體風場反演。
2、為實現上述目的,本發明采取以下技術方案:
3、第一方面,本發明提供一種基于浮動平臺的測風激光雷達風場反演優化方法,包括以下步驟:
4、利用激光雷達進行ppi掃描,并獲取校正前徑向風速;
5、對校正前徑向風速中由浮動平臺引起的徑向速度分量進行第一次校正;
6、利用移動測風儀獲取預設位置處的真實風速和風向,并根據真實風速和真實風向處理得到第一徑向風速;
7、在預設位置處進行rhi掃描,并根據rhi掃描結果處理得到第二徑向風速;
8、基于第一徑向風速和第二徑向風速對第一次校正后的徑向風速進行第二次校正;
9、基于第二次校正結果,采用vap算法對海面風場進行反演優化,得到風速和風向數據。
10、進一步,所述利用激光雷達進行ppi掃描,并獲取校正前徑向風速,包括:
11、利用安裝于浮動平臺的掃描型激光雷達進行固定俯仰角改變方位角的ppi掃描,并記錄激光光束相對于浮動平臺的方位角和俯仰角;
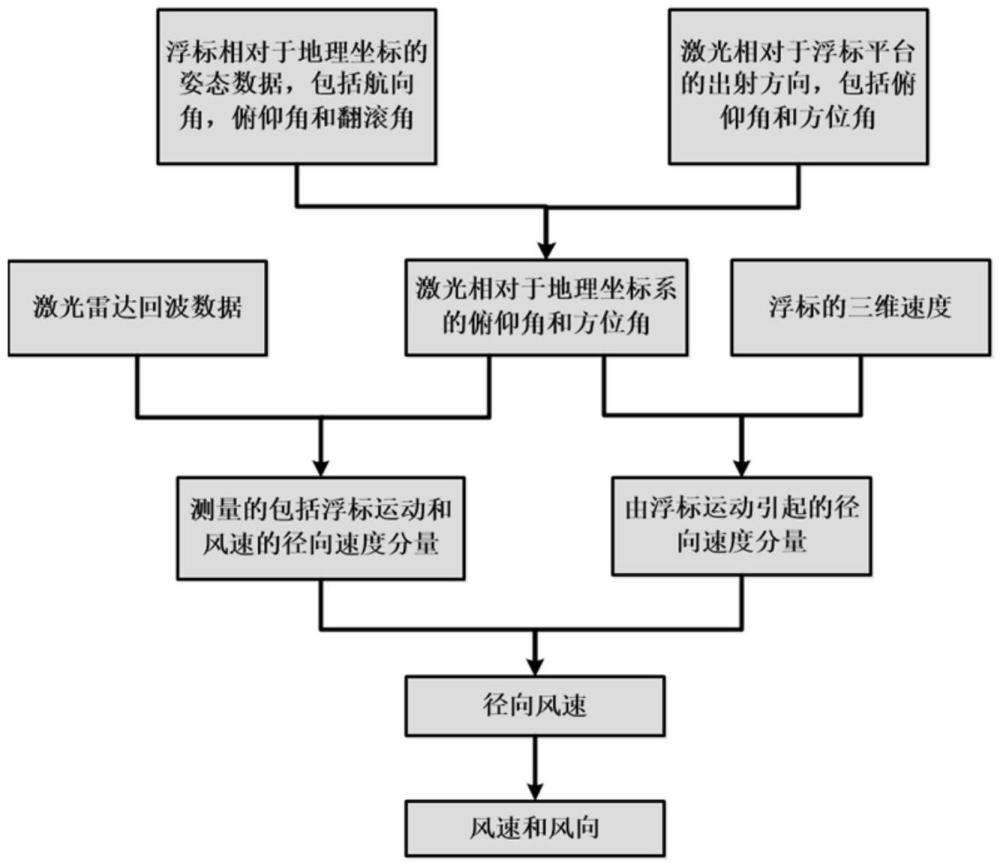
12、利用慣性導航系統記錄浮動平臺相對于地理坐標系的姿態角,并通過對地理坐標系和浮動平臺坐標系進行坐標變換,得到激光光束相對于地理坐標系的方位角和俯仰角,并計算得到徑向風速。
13、進一步,所述對校正前徑向風速中由浮動平臺引起的徑向速度分量進行第一次校正,包括:
14、基于激光光束相對于地理坐標系的俯仰角和方位角以及gps記錄的浮動平臺的三軸運動速度,得到由浮動平臺運動引起的徑向速度分量的計算值;
15、基于激光雷達的回波數據,提取浮動平臺和風速的徑向速度分量的測量值,對計算值進行姿態校正。
16、進一步,所述利用移動測風儀獲取預設位置處的真實風速和風向,并根據真實風速和真實風向處理得到第一徑向風速,包括:
17、在激光雷達第一個距離庫r1的第n個激光波束對應的校正前方位角處安裝基于gps的移動式測風儀,對真實風速和風向數據進行測量;
18、根據得到的真風速和真風向,計算移動測風儀在激光雷達校正前方位角對應的徑向風速為vlos_mast,i,作為第一徑向風速。
19、進一步,所述在預設位置處進行rhi掃描,并根據rhi掃描結果處理得到第二徑向風速,包括:
20、在激光雷達第一個距離庫r1的第n個激光波束對應的校正前方位角處進行rhi掃描,得到rhi掃描對應的徑向風速;
21、對rhi掃描對應的徑向風速進行姿態校正,得到姿態校正后rhi的方位角和俯仰角,分別表示為和θg_rhi,k,并計算得到第二徑向風速。
22、進一步,所述基于第一徑向風速和第二徑向風速對第一次校正后的徑向風速進行第二次校正,包括:
23、將校正前俯仰角θ0,i對應的ppi掃描面作為目標掃描面,計算第一個距離庫不同激光波束由于浮動平臺搖擺姿態造成的波動系數初始值;
24、將第一個距離庫的波動系數迭代到第二個距離庫,初步修正第二個距離庫的徑向風速vlos_ref,i,2';
25、基于初步修正后第二個距離庫的徑向風速vlos_ref,i,2',計算第二個距離庫的主風向和主風速;
26、采用rhi掃描數據對第二個距離庫的徑向風速進行第二次修正,得到最終修正的第二個距離庫的徑向風速及其波動系數;
27、重復上述各步驟,反演第j距離庫的徑向風速偏差δvlos,i,j,第j距離庫由于浮動平臺搖擺姿態造成的波動系數為βi,j,迭代修正第j距離庫的徑向速度vlos_ref,i,j。
28、進一步,所述基于第二次校正結果,采用vap算法對海面風場進行反演優化,得到風速和風向數據,包括:
29、對相鄰方位角間隔取平均;
30、基于方位角平均值,取同一高度圈上的徑向風速,通過三角關系從區域中心點的徑向風速推算該高度圈的水平風場,并依次計算其他高度圈上的水平風場。
31、第二方面,本發明提供一種基于浮動平臺的測風激光雷達風場反演優化系統,包括:
32、校正前徑向風速獲取模塊,用于利用激光雷達進行ppi掃描,并獲取校正前徑向風速;
33、第一校正模塊,用于對校正前徑向風速中由浮動平臺引起的徑向速度分量進行第一次校正;
34、第一徑向風速獲取模塊,用于利用移動測風儀獲取預設位置處的真實風速和風向,并根據真實風速和真實風向處理得到第一徑向風速;
35、第二徑向風速獲取模塊,用于在預設位置處進行rhi掃描,并根據rhi掃描結果處理得到第二徑向風速;
36、第二校正模塊,用于基于第一徑向風速和第二徑向風速對第一次校正后的徑向風速進行第二次校正;
37、反演模塊,用于基于第二次校正結果,采用vap算法對海面風場進行反演優化,得到風速和風向數據。
38、第三方面,本發明提供一種存儲一個或多個程序的計算機可讀存儲介質,所述一個或多個程序包括指令,所述指令當由計算設備執行時,使得所述計算設備執行任一方法。
39、第四方面,本發明提供一種計算設備,包括:一個或多個處理器及存儲器,所述存儲器中存儲有一個或多個程序,并被配置為所述一個或多個處理器執行,所述一個或多個程序包括用于執行任一方法的指令。
40、本發明由于采取以上技術方案,其具有以下優點:本發明由于浮動平臺搖擺姿態,測風激光雷達校正后的徑向波束相對于目標風場存在空間高度偏差,激光雷達ppi和rhi多種模式結合,同時利用原位測風傳感器提供真實風速,對造成的徑向速度偏差進行校正。
- 還沒有人留言評論。精彩留言會獲得點贊!