一種基于單片機控制的載波相位延遲補償方法及系統(tǒng)
本發(fā)明涉及激光干涉測量,特別是指一種基于單片機控制的載波相位延遲補償方法及系統(tǒng)。
背景技術(shù):
1、隨著工業(yè)和科學技術(shù)的發(fā)展,微振動測量技術(shù)在精密機械、地震監(jiān)測、生物醫(yī)學等領(lǐng)域的應用越來越廣泛。激光干涉測量技術(shù),以邁克爾遜干涉儀為代表,因其高精度和非接觸測量的特點,成為測量微振動的關(guān)鍵手段之一。其中,正弦相位調(diào)制干涉儀由于具有較高的分辨率,被廣泛應用于微振動測量中。
2、在現(xiàn)有技術(shù)中,相位生成載波解調(diào)算法因其靈敏度高、抗低頻干擾能力強、動態(tài)范圍大的優(yōu)勢,通常用于激光正弦相位調(diào)制干涉儀的信號解調(diào)。相位生成載波解調(diào)算法主要包括微分交叉相乘算法和反正切算法兩類,廣泛用于信號處理以獲取高精度的測量結(jié)果。
3、然而,生成載波解調(diào)算法在實際應用中容易受到相位調(diào)制深度和載波相位延遲的影響,導致非線性誤差和諧波失真。
4、此外,載波相位延遲還會隨環(huán)境中不穩(wěn)定因素的變化而發(fā)生漂變,這使得信號解調(diào)的精度難以保持,從而影響微振動測量的準確性。
技術(shù)實現(xiàn)思路
1、為了解決現(xiàn)有的生成載波解調(diào)算法在實際應用中容易受到相位調(diào)制深度和載波相位延遲的影響,導致非線性誤差和諧波失真,且載波相位延遲還會隨環(huán)境中不穩(wěn)定因素的變化而發(fā)生漂變,這使得信號解調(diào)的精度難以保持,從而影響微振動測量的準確性的技術(shù)問題,本發(fā)明提供了一種基于單片機控制的載波相位延遲補償方法及系統(tǒng)。
2、本發(fā)明實施例提供的技術(shù)方案如下:
3、第一方面:
4、本發(fā)明實施例提供的一種基于單片機控制的載波相位延遲補償方法,包括:
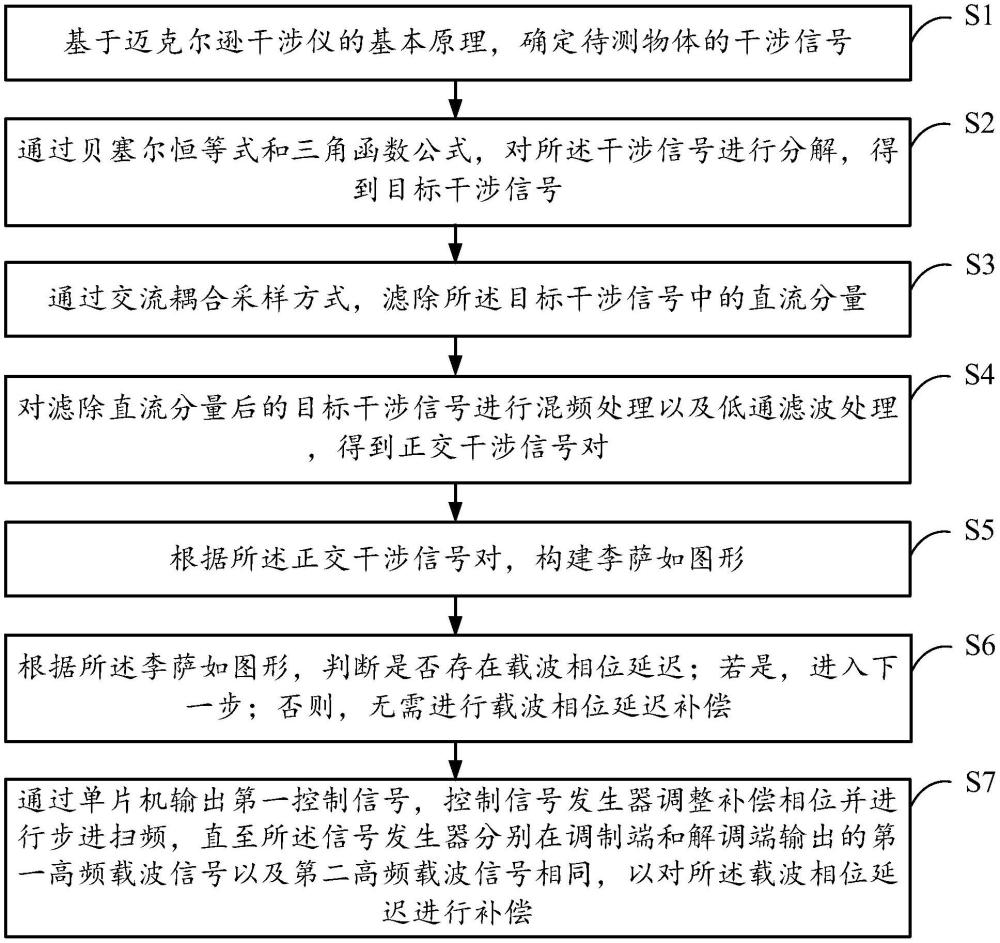
5、s1:基于邁克爾遜干涉儀的基本原理,確定待測物體的干涉信號;
6、s2:通過貝塞爾恒等式和三角函數(shù)公式,對所述干涉信號進行分解,得到目標干涉信號;
7、s3:通過交流耦合采樣方式,濾除所述目標干涉信號中的直流分量;
8、s4:對濾除直流分量后的目標干涉信號進行混頻處理以及低通濾波處理,得到正交干涉信號對;
9、s5:根據(jù)所述正交干涉信號對,構(gòu)建李薩如圖形;
10、s6:根據(jù)所述李薩如圖形,判斷是否存在載波相位延遲;若是,進入下一步;否則,無需進行載波相位延遲補償;
11、s7:通過單片機輸出第一控制信號,控制信號發(fā)生器調(diào)整補償相位并進行步進掃頻,直至所述信號發(fā)生器分別在調(diào)制端和解調(diào)端輸出的第一高頻載波信號以及第二高頻載波信號相同,以對所述載波相位延遲進行補償。
12、第二方面:
13、本發(fā)明實施例提供的一種基于單片機控制的載波相位延遲補償系統(tǒng),包括:存儲器和一個或多個處理器;
14、所述存儲器中存儲有一個或多個應用程序,所述一個或多個應用程序適于由所述一個或多個處理器執(zhí)行以實現(xiàn)上述的基于單片機控制的載波相位延遲補償方法。
15、本發(fā)明實施例提供的技術(shù)方案帶來的有益效果至少包括:
16、在本發(fā)明中,通過貝塞爾恒等式和三角函數(shù)公式,對干涉信號進行分解,得到目標干涉信號,通過交流耦合采樣方式,濾除目標干涉信號中的直流分量,并對濾除直流分量后的目標干涉信號進行混頻處理以及低通濾波處理,得到正交干涉信號對,在實際應用中不容易受到相位調(diào)制深度和載波相位延遲的影響,避免了非線性誤差和諧波失真,通過單片機輸出第一控制信號,控制信號發(fā)生器調(diào)整補償相位并進行步進掃頻,避免了載波相位延遲還會隨環(huán)境中不穩(wěn)定因素的變化而發(fā)生漂變的現(xiàn)象,這使得信號解調(diào)的精度得以保持,從而提升了微振動測量的準確性。
技術(shù)特征:
1.一種基于單片機控制的載波相位延遲補償方法,其特征在于,包括:
2.根據(jù)權(quán)利要求1所述的基于單片機控制的載波相位延遲補償方法,其特征在于,所述s1具體為:
3.根據(jù)權(quán)利要求2所述的基于單片機控制的載波相位延遲補償方法,其特征在于,所述待測相位具體為:
4.根據(jù)權(quán)利要求1所述的基于單片機控制的載波相位延遲補償方法,其特征在于,所述s2具體為:
5.根據(jù)權(quán)利要求1所述的基于單片機控制的載波相位延遲補償方法,其特征在于,所述正交干涉信號對具體為:
6.根據(jù)權(quán)利要求5所述的基于單片機控制的載波相位延遲補償方法,其特征在于,所述s5具體為:
7.根據(jù)權(quán)利要求1所述的基于單片機控制的載波相位延遲補償方法,其特征在于,所述第一高頻載波信號具體為:
8.根據(jù)權(quán)利要求1所述的基于單片機控制的載波相位延遲補償方法,其特征在于,所述第二高頻載波信號具體為:
9.根據(jù)權(quán)利要求1所述的基于單片機控制的載波相位延遲補償方法,其特征在于,在所述s7之后還包括:
10.一種基于單片機控制的載波相位延遲補償系統(tǒng),其特征在于,包括:存儲器和一個或多個處理器;
技術(shù)總結(jié)
本發(fā)明提供一種基于單片機控制的載波相位延遲補償方法及系統(tǒng),涉及激光干涉測量技術(shù)領(lǐng)域,方法包括:基于邁克爾遜干涉儀的基本原理,確定干涉信號;通過貝塞爾恒等式和三角函數(shù)公式,對干涉信號進行分解,得到目標干涉信號;通過交流耦合采樣方式,濾除目標干涉信號中的直流分量;對濾除直流分量后的目標干涉信號進行混頻處理和低通濾波處理,得到正交干涉信號對;根據(jù)正交干涉信號對,構(gòu)建李薩如圖形;根據(jù)李薩如圖形,判斷是否存在載波相位延遲;若是,通過單片機輸出第一控制信號,控制信號發(fā)生器調(diào)整補償相位并進行步進掃頻,直至信號發(fā)生器分別在調(diào)制端和解調(diào)端輸出的第一高頻載波信號以及第二高頻載波信號相同,以對載波相位延遲進行補償。
技術(shù)研發(fā)人員:汪晗,徐歡,張烈山,姚聰,邢兆強,呂明俊,李雪巖
受保護的技術(shù)使用者:浙江理工大學
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!