一種無模糊免搜索的互質陣列DoA估計方法
本發明涉及無線通信領域的目標定位測向技術,具體涉及一種無模糊免搜索的互質陣列doa估計方法,屬于陣列信號處理領域。
背景技術:
1、目標定位作為通信領域的核心研究方向之一,已經廣泛應用于毫米波雷達、自動駕駛技術、5g空分多址通信等多個重要應用場景。這些領域對精準的目標定位技術提出極高的需求,而波達方向(direction?of?arrival,doa)估計則是目標定位中的關鍵組成部分。該技術能夠精準確定目標信號的到達方向,協助通信系統實現環境感知和維持穩定通信。
2、隨著通信速率和頻段的不斷提升,doa估計技術面臨著越來越高的精度與實時性要求。在這一背景下,互質陣列因其獨特的性能優勢逐漸成為解決高精度doa估計問題的熱門研究方向。互質陣列由兩個滿足互質關系的均勻線性陣列組成,其獨特的結構設計無需遵循傳統天線陣列的半波長限制。這一特性不僅顯著擴展陣列孔徑,還有效降低天線設計的復雜性,同時減少互耦效應對陣列性能的影響。這些優勢使得互質陣列在通信領域展現出巨大的應用潛力。
3、然而,互質陣列在應用過程中也面臨著重大挑戰。當傳統doa估計算法直接應用于互質陣列時,由于組成互質陣列的均勻線陣間距變大,會產生嚴重的相位模糊問題。相位模糊問題使得doa估計的結果完全失效,嚴重影響目標定位的可靠性和精度。針對互質陣列的相位模糊問題,研究者進行了大量探索,并提出了多種改進算法。然而,現有解決方案普遍存在計算復雜度高、實時性不足的問題。因此,如何在對抗相位模糊問題的同時,充分利用互質陣列的高自由度與高分辨率性能,實現快速、可靠的doa估計,已成為通信領域的重要研究課題。
技術實現思路
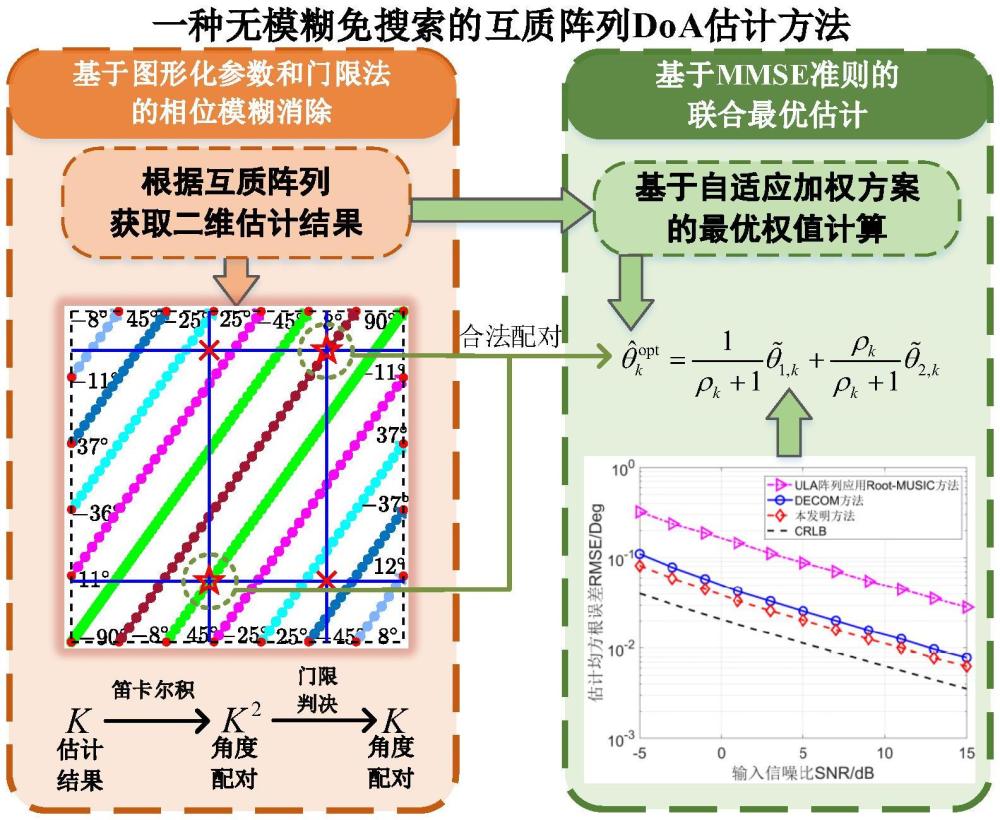
1、為解決互質陣列在進行目標定位時,因為相位模糊問題所導致的定位結果不可靠的問題,本發明的目的是提供一種無模糊免搜索的互質陣列doa估計方法,通過將問題圖形化方法將相位模糊問題具象化,通過圖形分析和幾何方法消除相位模糊問題,并借助自適應加權方案實現互質陣列的聯合最優估計,在避免模糊問題的同提高估計精度。
2、本發明公開的一種無模糊免搜索的互質陣列doa估計方法,包括如下步驟:
3、步驟1:構造一個由兩個均勻線陣組成的互質陣列。兩個均勻線陣分別擁有m1和m2的傳感器,對應不同的陣元間隔d1=m2λ/2,d2=m1λ/2。其中λ為信號波長,m1和m2互為質數。兩個均勻線陣排布在同一維度,并共用第一個傳感器陣元,傳感器總數n=m1+m2-1。
4、首先分析給定陣列結構下,帶有模糊的估計解與真值的映射關系。令兩個均勻線陣的關系參數a=m1/m2;定義pi,x表示第i個均勻線陣在第x個角度域下的模糊系數,并定義dx表示第x個角度域預設距離。
5、當x=0時,令pi,x=0(i∈1,2),dx=0。根據式(1)計算x=0對應角度域的正數臨界角度θ和該臨界角度對應的均勻線陣編號i。
6、{θ,i}=min{θi=|sin-1((pi,x+1)/mi)||i=1,2}???(1)
7、若不計算得到的臨界角度不滿足θ≥90°,則令:
8、x=x+1???(2)
9、pi,x=pi,x-1+1???(3)
10、
11、其中此時得到x=1時兩個均與線陣的模糊系數pi,x和預設距離dx。再次根據式(1)計算此時的臨界角度θ,若不滿足θ≥90°的要求,則再次重復式(2)-(5)的計算步驟。直至此時x對應的臨界角度θ滿足θ≥90°的要求,此時x指示θ>0°時劃分的角度域個數,該角度域個數被進一步記錄為x=x。
12、對于θ<0°的情況,直接令
13、pi,-x=pi,x???(6)
14、d-x=dx???(7)
15、其中x=1,…,x。得到描述互質陣列中兩個均勻線陣關系的一組參量{(a,pi,x,dx)|x∈{-x,…,0,…,x}}。
16、步驟2:使用步驟1構建的互質陣列接收k個不相關的遠場窄帶信號。信號各自的入射方向θk構成角度集θ={θ1,θ2,…θk,…,θk|θk∈(-90°,90°)}。此時互質陣列的中第i個均勻線陣在t時刻的采樣數據xi(t)表示為:
17、
18、其中i∈{1,2}對應兩個均勻線陣,s(t)=[s1(t),s2(t),…,sk(t),…,sk(t)]t表示獨立源信號矢量,sk(t)表示第k個信號的采樣波形,ni(t)是第i個均勻線陣上的高斯白噪聲矢量,ai=[ai(θ1),ai(θ2),…,ai(θk),…,ai(θk)]是互質陣列第i個均勻線陣的方向矩陣,ai(θk)表示第k個信號對應第i個均勻線陣上的方向向量。
19、步驟3:根據步驟2建立的采樣數據模型,計算l個采樣快拍下兩個均勻線陣各自的協方差矩陣ri,并對協方差矩陣執行特征分解操作:
20、
21、將特征分解的結果按照特征值從大到小的順序進行排序,和分別對應排序特征值中前k個特征值構成的對角矩陣和后mi-k個特征值構成的對角矩陣,而和分別是和對應的特征向量。
22、定義第i個均勻線陣中關于ui,n的多項式函數其中多項式系數中間參數計算fi(zi)=0(|zi|≤1),得到mi-1個特征根,取出其中最接近單位圓的k個復根后,根據式(10)計算第i個均勻線陣估計得到的對于第k個入射信號的模糊空間相位差:
23、
24、其中arg(·)表示取出相位角,mod(a,b)表示計算a/b的余數。根據式(10)可以計算得到兩個均勻線陣各自估計的模糊空間相位差集合:和
25、步驟4:計算步驟3得到的兩個模糊空間相位差集合的笛卡爾積:
26、
27、根據式(12)計算集合f中各個笛卡爾積對應在二維平面上的點到達過原點且斜率為關系參數a的直線的距離。
28、
29、將計算結果與步驟1計算的預設距離dx進行匹配,采用門限法取出合法值,這一步表示為一個優化問題,如式(13)所示:
30、
31、其中門限ε設置為:
32、
33、式(13)中優化問題的解集對應兩個均勻線陣的合法匹配結果,“合法”指出這些匹配對應同一個入射信號。根據該解集,計算無模糊的估計相位差,具體計算過程為:
34、
35、其中表示第k個信號在第i個均勻線陣上修正后無模糊的估計,pi.z是步驟1得到的該互質陣列的模糊系數。然后即得到一個無模糊的相位差匹配集合:
36、
37、步驟5:根據步驟4得到的匹配集合,以及式(10)給出的信號相位差與入射角度的關系,得到無模糊的角度匹配集合:
38、
39、根據式(18)計算互質陣列對于輸入信號相位差的聯合最終估計:
40、
41、進而得到角度集其中ρk為實現聯合估計的自適應加權系數,其計算式表述為:
42、
43、集合是步驟3中計算多項式函數fi(zi)=0(|zi|≤1)得到的mi-1個特征根。是為簡化公式表達的中間參數,其計算式由(20)給出:
44、
45、其中(·)*表示取共軛,表示取實部。
46、步驟6:將步驟5計算得到的角度集作為最終估計結果輸出,所述最終估計結果即得到的無模糊doa估計結果,即實現無模糊免搜索的互質陣列doa估計。
47、有益效果:
48、1、相較于傳統的均勻線性陣列,本發明公開的一種無模糊免搜索的互質陣列doa估計方法,基于展開的互質陣列實現,在相同的陣元數目下,互質陣列能夠獲得更大的天線孔徑和更高的估計精度,并且能夠降低陣列設計難度和天線的互耦效應。
49、2、本發明公開的一種無模糊免搜索的互質陣列doa估計方法,借助構成互質陣列的兩個均勻線陣的關系參量實現了對互質陣列特有的相位模糊問題的快速消除。相較于現有模糊消除算法,本發明通過將問題圖形化方法將相位模糊問題具象化,通過圖形分析和幾何方法消除相位模糊問題,實現了在免去搜索操作的情況下快速消去互質陣列的相位模糊問題,擁有更低的計算復雜度,進而提高互質陣列doa估計效率。
50、3、本發明公開的一種無模糊免搜索的互質陣列doa估計方法,借助自適應加權實現聯合互質陣列兩個均勻線陣的最優估計,得到的估計結果在均方誤差最小的意義下是最優的。相較于傳統方案中的均值加權方案,本發明的估計性能總是優于或至少等于均值加權方案。
- 還沒有人留言評論。精彩留言會獲得點贊!