無人駕駛作業路徑規劃方法、裝置、設備、介質及農機與流程
本技術涉及路徑規劃的,尤其是涉及一種無人駕駛作業路徑規劃方法、裝置、設備、介質及農機。
背景技術:
1、隨著快速發展,無人駕駛農機在田間作業中的應用日益廣泛。路徑規劃作為無人駕駛系統的核心技術之一,直接影響農機作業效率與資源利用率。目前,傳統農機作業路徑規劃多采用“回”字形或“弓”字形模式,其核心問題在于地頭轉彎時易形成“魚尾形”或“燈泡形”轉彎路徑。此類轉彎方式不僅占用較大空間,還因轉彎半徑與作業幅寬匹配度不足,導致農機需頻繁倒車或多次調整方向,尤其在直耙、旋耕、水田打漿等特定作業場景下,倒車操作難度高、耗時長,嚴重制約作業效率。
2、因此,亟需一種兼顧靈活性、高效性與環境適應性的無人駕駛農機路徑規劃方法,以解決現有技術中轉彎冗余、倒車困難及作業連續性差等核心痛點,推動農業無人化作業向更高精度、更低成本的方向發展。
技術實現思路
1、為了確保車輛地頭轉彎操作的連續性和高效性,實現車輛的全程無人駕駛作業,本技術提供一種無人駕駛作業路徑規劃方法、裝置、設備、介質及農機。
2、第一方面,本技術提供一種無人駕駛作業路徑規劃方法,包括:
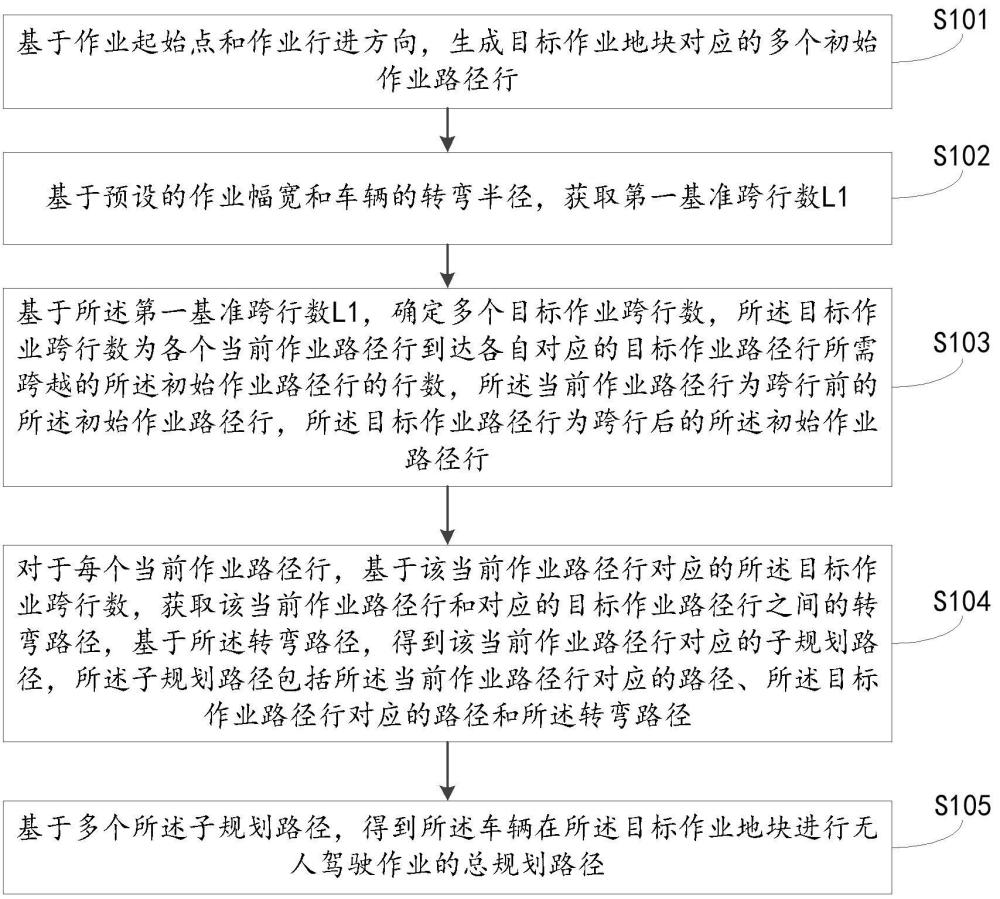
3、基于作業起始點和作業行進方向,生成目標作業地塊對應的多個初始作業路徑行;
4、基于預設的作業幅寬和車輛的轉彎半徑,獲取第一基準跨行數;
5、基于所述第一基準跨行數,確定多個目標作業跨行數,所述目標作業跨行數為各個當前作業路徑行到達各自對應的目標作業路徑行所需跨越的所述初始作業路徑行的行數,所述當前作業路徑行為跨行前的所述初始作業路徑行,所述目標作業路徑行為跨行后的所述初始作業路徑行;
6、對于每個當前作業路徑行,基于該當前作業路徑行對應的所述目標作業跨行數,獲取該當前作業路徑行和對應的目標作業路徑行之間的轉彎路徑,基于所述轉彎路徑,得到該當前作業路徑行對應的子規劃路徑,所述子規劃路徑包括所述當前作業路徑行對應的路徑、所述目標作業路徑行對應的路徑和所述轉彎路徑;
7、基于多個所述子規劃路徑,得到所述車輛在所述目標作業地塊進行無人駕駛作業的總規劃路徑。
8、本技術的有益效果為:根據目標作業地塊,動態調整初始作業路徑行、目標作業跨行數和總規劃路徑,可以適應不同目標作業地塊的復雜性(如不規則邊界、凹凸區域等)。通過根據作業幅寬和轉彎半徑,確定第一基準跨行數,進而得到目標作業跨行數,在保證車輛根據總規劃路徑行進中的直耙作業不出現魚尾或燈泡轉彎的前提下,基于目標作業跨行數進行轉彎,確保了車輛地頭轉彎操作的連續性和高效性。顯著提升了農業作業的效率,且基于總規劃路徑,可以僅需通過遠程操作即可實現車輛的全程無人駕駛作業,為無人農場建設提供了全新解決方案。
9、進一步,在所述基于作業起始點和作業行進方向,生成目標作業地塊對應的多個初始作業路徑行之前,還包括:
10、獲取所述目標作業地塊對應的初始邊界信息;
11、基于douglas-peucker算法,對所述初始邊界信息進行數據點簡化處理,得到目標邊界信息,以基于所述目標邊界信息生成多個所述初始作業路徑行。
12、采用上述進一步方案的有益效果是:通過對所述初始邊界信息進行數據點簡化處理,減少了數據點的密集程度,降低了車輛導航中不必要的計算負擔。
13、進一步,所述基于所述第一基準跨行數,確定多個目標作業跨行數,包括:
14、基于所述第一基準跨行數和所述目標作業地塊對應的實際作業需求,獲取第一正向跨行數和第一反向跨行數,所述實際作業需求包括所述目標作業地塊的地塊形狀、作業效率和車輛機械操作需求,第一反向跨行數比所述第一正向跨行數少一行;
15、基于所述第一正向跨行數和所述第一反向跨行數,進行所述車輛在所述目標作業地塊作業的初始規劃,得到初始規劃路徑,并將所述初始規劃路徑劃分為規劃順序不同的多個子區域;在所述初始規劃中,若任一個所述當前作業路徑行到達對應的目標作業路徑行的行進方向為正向行進方向,則所需的跨行數為所述第一正向跨行數;若任一個所述當前作業路徑行到達對應的目標作業路徑行的行進方向為反向行進方向,則所需的跨行數為所述第一反向跨行數;所述正向行進方向與所述作業起始點到達作業終點的行進方向相同,所述反向行進方向與所述作業起始點到達作業終點的行進方向相反;
16、若所述初始規劃路徑覆蓋所有的所述初始作業路徑行,則將所述第一正向跨行數作和所述第一反向跨行數作為各個所述子區域對應的所述目標作業跨行數;
17、若所述初始規劃路徑未覆蓋所有的所述初始作業路徑行,則對最后一個所述子區域對應的所述第一正向跨行數和所述第一反向跨行數進行調整,以使所述初始規劃路徑覆蓋全部的所述初始作業路徑行,將調整后的所述第一正向跨行數和所述第一反向跨行數作為最后一個所述子區域對應的所述目標作業跨行數,將所述第一正向跨行數和所述第一反向跨行數作為每個非最后一個所述子區域對應的所述目標作業跨行數。
18、采用上述進一步方案的有益效果是:通過對最后一個子區域對應的第一正向跨行數和第一反向跨行數進行調整,可以將未覆蓋的最后幾個初始作業路徑行合并入最后一個子區域對應的規劃路徑中,避免了出現魚尾和燈泡轉彎。
19、進一步,所述基于所述第一正向跨行數和所述第一反向跨行數,進行所述車輛在所述目標作業地塊作業的初始規劃,得到初始規劃路徑,包括:
20、對于每個所述當前作業路徑行,判斷該當前作業路徑行與所述作業起始點之間是否存在未覆蓋的所述初始作業路徑行;
21、對于每個所述當前作業路徑行,若存在未覆蓋的所述初始作業路徑行,則基于所述第一反向跨行數和反向行進方向,判斷該當前作業路徑行與所述作業起始點之間是否存在所述目標作業路徑行;若不存在所述目標作業路徑行,則完成所述初始規劃,得到所述當前作業路徑行對應的初始子路徑;若存在所述目標作業路徑行,則獲取該當前作業路徑行與所述目標作業路徑行之間的初始子路徑,并將所述目標作業路徑行作為新的所述當前作業路徑行,重復所述判斷該當前作業路徑行與所述作業起始點之間是否存在未覆蓋的所述初始作業路徑行的步驟,直至完成所述初始規劃,得到所述當前作業路徑行對應的初始子路徑;
22、對于每個所述當前作業路徑行,若不存在未覆蓋的所述初始作業路徑行,則基于所述第一正向跨行數和正向行進方向,重復所述判斷該當前作業路徑行與所述作業起始點之間是否存在所述目標作業路徑行的步驟,直至得到所述當前作業路徑行對應的初始子路徑;
23、基于各個所述初始子路徑,得到所述初始規劃路徑。
24、采用上述進一步方案的有益效果是:通過判斷當前作業路徑行與作業起始點之間是否存在未覆蓋的初始作業路徑行,能夠動態調整路徑規劃,降低遺漏或重復作業區域的可能性。通過正向和反向行進方向的交替判斷,能夠生成連續的“弓字型”路徑,確保車輛在完成一行作業后,能夠高效地進入下一行,減少了空駛距離和時間浪費。
25、進一步,在所述對最后一個所述子區域對應的所述第一正向跨行數和所述第一反向跨行數進行調整之前,還包括:
26、基于預設的關系式,獲取第二基準跨行數,以基于所述第二基準跨行數調整所述第一正向跨行數和所述第一反向跨行數;
27、所述關系式表示為:
28、
29、其中,r表示所述轉彎半徑,w表示所述作業幅寬,s表示所述目標作業地塊的最長邊界的尺寸,n表示所述子區域的總個數,d表示以所述第一正向跨行數和所述第一反向跨行數進行規劃得到的所述子區域,在所述最長邊界的延伸方向上的長度。
30、采用上述進一步方案的有益效果是:確保了第二基準跨行數與地塊尺寸、機械操作能力(轉彎半徑)和作業幅寬的匹配性,避免了跨行數過大或過小導致的路徑規劃不合理問題,便于根據第二基準跨行數對第一正向跨行數和第一反向跨行數進行調整。
31、進一步,所述獲取該當前作業路徑行和所述目標作業路徑行之間的轉彎路徑,包括:
32、對于每個當前作業路徑行,獲取所述當前作業路徑行和所述目標作業路徑行之間的dubins曲線,基于所述dubins曲線,得到所述轉彎路徑。
33、采用上述進一步方案的有益效果是:通過使用dubins曲線,能夠確保車輛在轉彎時以最小的路徑長度完成轉向,從而減少空駛距離和時間浪費,實現當前作業路徑行和目標作業路徑行之間的平滑連接。
34、第二方面,本技術提供一種無人駕駛作業路徑規劃裝置,包括:
35、初始路徑生成模塊,用于基于作業起始點和作業行進方向,生成目標作業地塊對應的多個初始作業路徑行;
36、第一基準獲取模塊,用于基于預設的作業幅寬和車輛的轉彎半徑,獲取第一基準跨行數;
37、確定跨行數模塊,用于基于所述第一基準跨行數,確定多個目標作業跨行數,所述目標作業跨行數為各個當前作業路徑行到達各自對應的目標作業路徑行所需跨越的所述初始作業路徑行的行數,所述當前作業路徑行為跨行前的所述初始作業路徑行,所述目標作業路徑行為跨行后的所述初始作業路徑行;
38、獲取轉彎路徑模塊,用于對于每個當前作業路徑行,基于該當前作業路徑行對應的所述目標作業跨行數,獲取該當前作業路徑行和對應的目標作業路徑行之間的轉彎路徑,基于所述轉彎路徑,得到該當前作業路徑行對應的子規劃路徑,所述子規劃路徑包括所述當前作業路徑行對應的路徑、所述目標作業路徑行對應的路徑和所述轉彎路徑;
39、得到總路徑模塊,用于基于多個所述子規劃路徑,得到所述車輛在所述目標作業地塊進行無人駕駛作業的總規劃路徑。
40、第三方面,本技術提供一種電子設備,包括處理器和存儲器,所述處理器與所述存儲器耦合;
41、所述處理器用于執行所述存儲器中存儲的計算機程序,以使得所述電子設備執行如第一方面任一項所述的方法。
42、第四方面,本技術提供一種計算機可讀存儲介質,包括計算機程序或指令,當所述計算機程序或指令在計算機上運行時,使得所述計算機執行如第一方面任一項所述的方法。
43、第五方面,本技術提供一種無人駕駛農機,包括車主體、機具、機具驅動設備、顯示終端和如第三方面所述的電子設備;
44、所述電子設備用于將總規劃路徑發送至所述車主體,所述車主體用于基于所述總規劃路徑,帶動所述機具進行作業;
45、所述總規劃路徑包括轉彎路徑,在所述機具進入所述轉彎路徑前,所述機具驅動設備將所述機具提升至非作業高度,在所述機具退出所述轉彎路徑時,所述機具驅動設備將所述機具調整至作業高度;
46、所述顯示終端用于展示農機的實時作業狀態、機具狀態、所述總規劃路徑、基于所述總規劃路徑的已行進路徑和未行進路徑。
- 還沒有人留言評論。精彩留言會獲得點贊!