基于最小二乘法的聯合多波束角度雷達高分辨率成像方法
本發明涉及毫米波雷達領域,尤其涉及一種基于最小二乘法的聯合多波束角度雷達高分辨率成像方法。
背景技術:
1、毫米波雷達因其頻段特性,能夠在復雜天氣條件下實現較遠距離成像,在自動駕駛、無人機導航、安防監控等領域具有重要應用。作為雷達成像中的關鍵模式,波束成形模式通過在特定方向集中信號能量,實現了較高的信噪比和空間分辨率。然而,傳統波束成形方法在處理稀疏天線陣列時面臨顯著挑戰。
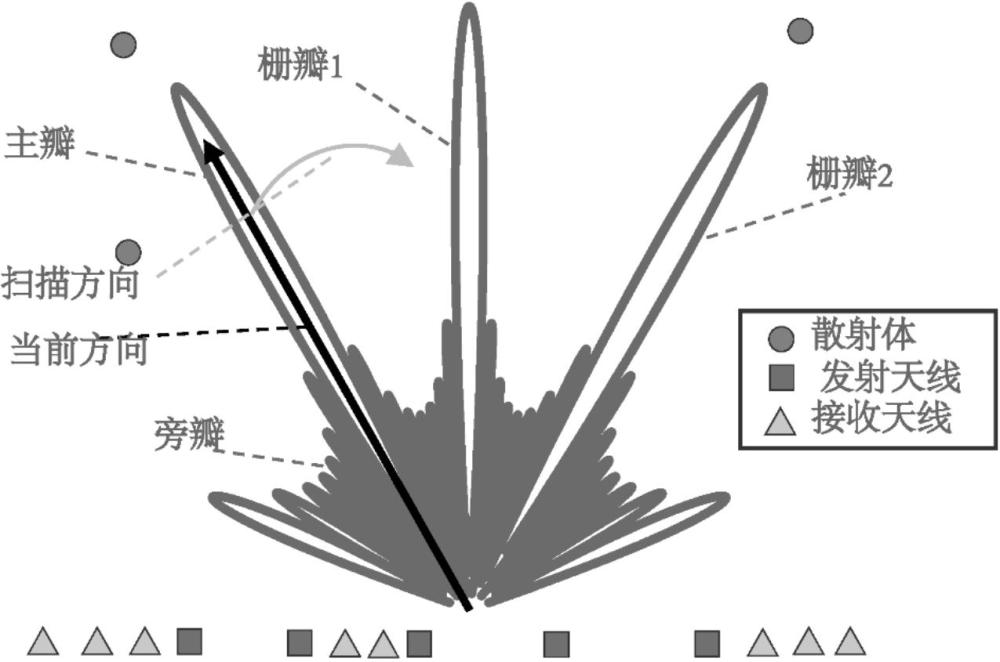
2、在稀疏天線陣列中,陣元間距的擴大盡管增加了等效孔徑,但也引入了顯著的旁瓣和柵瓣效應。旁瓣會導致非期望方向的干擾信號,而柵瓣則會在其他方向產生能量峰值,與主瓣強度相當。這些效應降低了目標檢測的準確性,并限制了成像分辨率的提升。現有技術通常通過聯合發射和接收波束成形的方法,試圖抑制旁瓣和柵瓣,但這些方法將旁瓣和柵瓣信號簡單視為干擾或噪聲,忽略了它們所包含的有用反射信息。這種處理方式不僅損失了寶貴的目標信息,還增加了對天線均勻排列和波束成形方向圖優化的依賴。因此,如何在毫米波雷達波束成形狀模式下,在減少旁瓣和柵瓣干擾的同時充分利用旁瓣和柵瓣中包含的反射信息成為了關鍵性問題。
技術實現思路
1、本發明目的在于針對現有技術的不足,提出一種基于最小二乘法的聯合多波束角度雷達高分辨率成像方法。
2、本發明的目的是通過以下技術方案來實現的:一種基于最小二乘法的聯合多波束角度雷達高分辨率成像方法,包括如下步驟:
3、s1、使用具有多發射多接收天線的毫米波線性調頻連續波雷達,以波束成形工作模式進行采樣,并對采樣得到的數據進行預處理,得到預處理后的四維張量;
4、s2、對四維張量進行多普勒處理,根據多普勒是否為零,將輸出分為靜目標的三維張量和動目標的三維張量;
5、s3、分別對靜目標和動目標的三維張量進行取距離切片操作,得到不同距離對應的波束成形角度-接收天線切片矩陣,包含波束各方向增益;
6、s4、根據波束成形角度-接收天線切片矩陣,使用最小二乘法估計該距離下成像目標所在的角度;
7、s4、將不同距離切片最小二算法的計算結果拼接,得到初始的距離-角度矩陣,進行恒虛警檢測,得到靜目標和動目標的成像結果。
8、進一步地,所述對采樣得到的數據進行預處理具體包括:對接收數據依次進行距離點fft,多普勒點fft處理,得到預處理后的四維張量,其中為一個啁啾內的采樣點數,為每個角度下相同啁啾的重復次數,為波束成形角度數,為接收天線數。
9、進一步地,所述對四維張量進行多普勒處理具體為:將多普勒為0的一個切片輸出作為靜目標距離-波束成形角度-接收天線三維張量,將多普勒非0的多個切片在多普勒維度上求平均作為動目標距離-波束成形角度-接收天線三維張量;
10、進一步地,所述取距離切片操作包括:對三維張量中不同距離對應的波束成形角度-接收天線切片矩陣。
11、切片矩陣的第列有以下表達式:
12、
13、其中表示發射波束成形矩陣,此處表示導向矢量,對任意的一個角度,,表示第號發射天線與號發射天線的距離,表示雷達載波頻率對應的波長,表示各方向上不同天線發射信號的相位變化差,是離散化的方向,表示各方向上回波信號到第號接收天線的相位變化,表示號接收天線與號接收天線的距離;表示當距離下個離散方向對應點處的物體散射系數;是加性噪聲,服從均值為0的復高斯分布。
14、進一步地,所述使用最小二乘法估計該距離下成像目標所在的角度具體包括:用約束最小二乘法,求解優化問題,得到約束最小二乘解。
15、進一步地,所述約束最小二乘解在計算過程中的正則函數為:不同方向所估計散射系數的2-范數,具體公式如下:
16、,參數設為估計信噪比的0.1倍。
17、進一步地,所述恒虛警檢測具體包括:根據初始的距離-角度矩陣,設置保護帶長度和訓練帶長度,虛警率,對距離角度矩陣的每一個單元,分別計算噪聲水平,其中矩陣已經補充零處理,下標超過原矩陣最大下標時對應值設為0;
18、然后,對比每一個單元值與噪聲水平,如果超過閾值,則保留該單元值,否則將其置為0。
19、進一步地,所述恒虛警檢測中的超過閾值具體為:。
20、根據說明書的另一方面,還提供了一種基于最小二乘法的聯合多波束角度雷達高分辨率成像裝置,包括存儲器和一個或多個處理器,所述存儲器中存儲有可執行代碼,所述處理器執行所述可執行代碼時,實現所述的一種基于最小二乘法的聯合多波束角度雷達高分辨率成像方法。
21、根據說明書的另一方面,還提供了一種計算機可讀存儲介質,其上存儲有程序,所述程序被處理器執行時,實現所述的一種基于最小二乘法的聯合多波束角度雷達高分辨率成像方法。
22、本發明的有益效果:本發明將傳統方法視為干擾的旁瓣和柵瓣信號整合為成像信息的一部分,充分挖掘其包含的目標散射特性。通過多角度聯合處理,在最小二乘法的計算過程中內涵了波束不同方向的增益;充分利用旁瓣和柵瓣信息,將旁瓣和柵瓣信號視為目標反射的有用數據,而非干擾,顯著提升了成像分辨率;適用于稀疏天線陣列;整體優化計算,通過多角度聯合建模,避免了逐角度處理的局限性,提升了算法效率并降低了偽目標干擾。
技術特征:
1.一種基于最小二乘法的聯合多波束角度雷達高分辨率成像方法,其特征在于,包括如下步驟:
2.根據權利要求1所述的一種基于最小二乘法的聯合多波束角度雷達高分辨率成像方法,其特征在于,所述對采樣得到的數據進行預處理具體包括:對接收數據依次進行距離點fft,多普勒點fft處理,得到預處理后的四維張量,其中為一個啁啾內的采樣點數,為每個角度下相同啁啾的重復次數,為波束成形角度數,為接收天線數。
3.根據權利要求1所述的一種基于最小二乘法的聯合多波束角度雷達高分辨率成像方法,其特征在于,所述對四維張量進行多普勒處理具體為:將多普勒為0的一個切片輸出作為靜目標距離-波束成形角度-接收天線三維張量,將多普勒非0的多個切片在多普勒維度上求平均作為動目標距離-波束成形角度-接收天線三維張量。
4.根據權利要求1所述的一種基于最小二乘法的聯合多波束角度雷達高分辨率成像方法,其特征在于,所述取距離切片操作包括:對三維張量中不同距離對應的波束成形角度-接收天線切片矩陣,
5.根據權利要求4所述的一種基于最小二乘法的聯合多波束角度雷達高分辨率成像方法,其特征在于,所述使用最小二乘法估計該距離下成像目標所在的角度具體包括:用約束最小二乘法,求解優化問題,得到約束最小二乘解。
6.根據權利要求5所述的一種基于最小二乘法的聯合多波束角度雷達高分辨率成像方法,其特征在于,所述約束最小二乘解在計算過程中的正則函數為:不同方向所估計散射系數的2-范數,具體公式如下:
7.根據權利要求1所述的一種基于最小二乘法的聯合多波束角度雷達高分辨率成像方法,其特征在于,所述恒虛警檢測具體包括:根據初始的距離-角度矩陣,設置保護帶長度和訓練帶長度,虛警率,對距離角度矩陣的每一個單元,分別計算噪聲水平,其中矩陣已經補充零處理,下標超過原矩陣最大下標時對應值設為0;
8.根據權利要求7所述的一種基于最小二乘法的聯合多波束角度雷達高分辨率成像方法,其特征在于,所述恒虛警檢測中的超過閾值具體為:。
9.一種基于最小二乘法的聯合多波束角度雷達高分辨率成像裝置,包括存儲器和一個或多個處理器,所述存儲器中存儲有可執行代碼,其特征在于,所述處理器執行所述可執行代碼時,實現如權利要求1-8中任一項所述的一種基于最小二乘法的聯合多波束角度雷達高分辨率成像方法。
10.一種計算機可讀存儲介質,其上存儲有程序,其特征在于,所述程序被處理器執行時,實現如權利要求1-8中任一項所述的一種基于最小二乘法的聯合多波束角度雷達高分辨率成像方法。
技術總結
本發明公開了一種基于最小二乘法的聯合多波束角度雷達高分辨率成像方法。該方法通過建立完整的信號模型,將發射波束旁瓣和柵瓣信號納入成像過程,避免將其視為干擾而是作為目標方向反射信息的有效補充。本發明提出了一種基于最小二乘法的聯合估計方法,通過對多個發射波束角度的回波信號進行整體優化處理,顯著降低旁瓣偽影,提高角度分辨率,并緩解稀疏陣列中柵瓣的干擾問題。該方法能有效提升毫米波雷達在復雜場景下的成像分辨率,具有廣泛的實際應用潛力。
技術研發人員:張朝陽,龍浩宇
受保護的技術使用者:浙江大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!