一種空降空投降落傘智能操縱系統
本發明涉及空降空投,尤其涉及一種空降空投降落傘智能操縱系統。
背景技術:
1、空降主要用于作戰、航空救生、搶險救災、航空娛樂和商務活動。包括傘降、機降、空投。隨著航空裝備和空降技術的不斷發展,空降方式將更加多樣化,使用范圍更加廣泛,使用降落傘將人員或裝備、物資從空中降落于地面的空降行動,人員傘降稱為跳傘,裝備、物資傘降稱為帶傘空投,其中,跳傘按性質通常分為戰斗跳傘、訓練跳傘、任務跳傘;按行動分為主動跳傘和被迫跳傘;按降落點的自然地理條件,還可分為山地跳傘、森林地跳傘、水網稻田地跳傘、炎熱地區跳傘、寒區跳傘、水上跳傘和高原跳傘等,戰斗跳傘是空降兵遂行戰斗任務時進行的跳傘。訓練跳傘是空降兵為掌握和提高跳傘技能進行的訓練活動,任務跳傘是除戰斗、訓練跳傘以外,執行其他專項任務的跳傘,用航空器裝載人員、裝備、物資直接(或間接)降落于地面的空降行動;
2、現有技術中,不便于對空降的準確性進行把控,因此我們提出了一種空降空投降落傘智能操縱系統,用來解決上述問題。
技術實現思路
1、本發明的目的是為了解決現有技術中存在不便于對空降的準確性進行把控的缺點,而提出的一種空降空投降落傘智能操縱系統。
2、為了實現上述目的,本發明采用了如下技術方案:
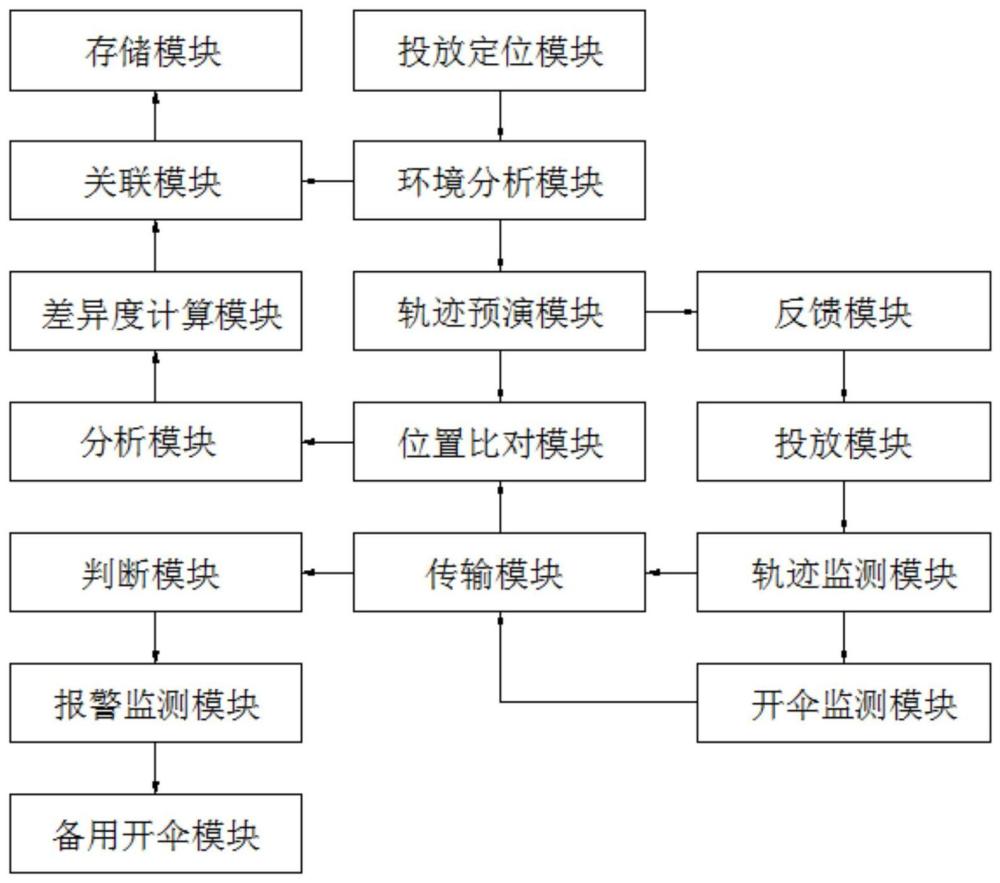
3、一種空降空投降落傘智能操縱系統,包括存儲模塊、關聯模塊、差異度計算模塊、分析模塊、判斷模塊、報警監測模塊、備用開傘模塊、投放定位模塊、環境分析模塊、軌跡預演模塊、位置比對模塊、傳輸模塊、反饋模塊、投放模塊、軌跡監測模塊、開傘監測模塊,所述投放定位模塊與環境分析模塊連接,環境分析模塊與關聯模塊和軌跡預演模塊連接,軌跡預演模塊與位置比對模塊和反饋模塊連接,所述反饋模塊與投放模塊連接,投放模塊與軌跡監測模塊連接,軌跡監測模塊與開傘監測模塊和傳輸模塊連接,傳輸模塊與位置比對模塊和判斷模塊連接,判斷模塊與報警監測模塊連接,報警監測模塊與備用開傘模塊連接,所述位置對比模塊與分析模塊連接,所述分析模塊與差異度計算模塊連接,差異度計算模塊與關聯模塊連接,關聯模塊與存儲模塊連接。
4、優選的,所述環境分析模塊包括安裝板,安裝板的一側固定安裝有防護框,防護框內滑動安裝有滑板,滑板的底部固定安裝有攝像機,所述防護框的一側固定安裝有固定板,固定板上轉動安裝有轉動軸,轉動軸上固定安裝有連接臂的一端,連接臂的另一端固定安裝有密封板,密封板的頂部與防護框的底部接觸,所述密封板的頂部固定安裝有溫濕度傳感器和風力傳感器,所述滑板上開設有多個小孔。
5、優選的,所述安裝板上開設有腔體,腔體的頂部內壁上轉動安裝有螺桿,螺桿的底端延伸至防護框內,且螺桿與滑板螺紋連接。
6、優選的,所述防護框的一側內壁上固定安裝有軸承,螺桿的底端與軸承的內圈固定連接。
7、優選的,所述防護框的一側固定安裝有橫板,橫板上轉動安裝有傳動桿,傳動桿的底端固定安裝有第一錐齒輪。
8、優選的,所述第一錐齒輪上嚙合有第二錐齒輪,第二錐齒輪固定套設于轉動軸的外側。
9、優選的,所述傳動桿的頂端延伸至腔體內并固定安裝有第一齒輪,第一齒輪上嚙合有第二齒輪,第二齒輪固定套設于螺桿的外側。
10、優選的,所述安裝板的底部固定安裝有電機,電機的輸出軸上固定安裝有第三齒輪,第三齒輪上嚙合有第四齒輪,第四齒輪固定套設于傳動桿的外側。
11、優選的,所述防護框的一側固定安裝有安裝盒,安裝盒的底部內壁上固定安裝有風機,所述安裝盒的頂部固定連接有連接管,安裝板的底部開設有吹風口,吹風口位于防護框的內側。
12、優選的,所述安裝盒的底部開設有進氣口,風機的進風口與進氣口連通,進氣口內固定安裝有過濾網,密封板覆蓋于進風口的底部開口處。
13、本發明中,所述一種空降空投降落傘智能操縱系統的有益效果:
14、本發明通過投放定位模塊對空投位置進行定位,通過環境分析模塊對空投區域的環境進行采集分析,然后通過軌跡預演模塊對空投軌跡進行預測,預測后通過反饋模塊向投放模塊發送信號,投放模塊進行空投,通過軌跡監測模塊對空投物體的下落軌跡進行監測,通過開傘監測模塊對降落傘的開傘情況進行監測,軌跡監測模塊監測的數據通過傳輸模塊傳輸至位置比對模塊,與預測的軌跡進行對比,將對比數據傳輸至分析模塊,分析模塊對兩組數據進行分析,判斷是否存在差異,存在差異則通過差異度計算模塊對差異度進行計算,進而對空投的準確性進行把控,同時結合關聯數據,可以分析出環境因素對空投的影響;
15、計算的數據與環境分析模塊監測的數據進行關聯,最后在存儲模塊中進行存儲,開傘情況通過傳輸模塊傳輸至判斷模塊,判斷模塊對接收的數據進行判斷,若未完成開傘,則通過報警監測模塊進行報警,同時通過備用開傘模塊開啟備用降落傘;
16、本發明可以對空投的準確性進行把控,同時結合關聯數據,可以分析出環境因素對空投的影響。
技術特征:
1.一種空降空投降落傘智能操縱系統,包括存儲模塊、關聯模塊、差異度計算模塊、分析模塊、判斷模塊、報警監測模塊、備用開傘模塊、投放定位模塊、環境分析模塊、軌跡預演模塊、位置比對模塊、傳輸模塊、反饋模塊、投放模塊、軌跡監測模塊、開傘監測模塊,其特征在于,所述投放定位模塊與環境分析模塊連接,環境分析模塊與關聯模塊和軌跡預演模塊連接,軌跡預演模塊與位置比對模塊和反饋模塊連接,所述反饋模塊與投放模塊連接,投放模塊與軌跡監測模塊連接,軌跡監測模塊與開傘監測模塊和傳輸模塊連接,傳輸模塊與位置比對模塊和判斷模塊連接,判斷模塊與報警監測模塊連接,報警監測模塊與備用開傘模塊連接,所述位置對比模塊與分析模塊連接,所述分析模塊與差異度計算模塊連接,差異度計算模塊與關聯模塊連接,關聯模塊與存儲模塊連接。
2.根據權利要求1所述的一種空降空投降落傘智能操縱系統,其特征在于,所述環境分析模塊包括安裝板(1),安裝板(1)的一側固定安裝有防護框(2),防護框(2)內滑動安裝有滑板(3),滑板(3)的底部固定安裝有攝像機(4),所述防護框(2)的一側固定安裝有固定板(5),固定板(5)上轉動安裝有轉動軸(6),轉動軸(6)上固定安裝有連接臂(7)的一端,連接臂(7)的另一端固定安裝有密封板(8),密封板(8)的頂部與防護框(2)的底部接觸,所述密封板(8)的頂部固定安裝有溫濕度傳感器(9)和風力傳感器(10),所述滑板(3)上開設有多個小孔(28)。
3.根據權利要求2所述的一種空降空投降落傘智能操縱系統,其特征在于,所述安裝板(1)上開設有腔體(18),腔體(18)的頂部內壁上轉動安裝有螺桿(19),螺桿(19)的底端延伸至防護框(2)內,且螺桿(19)與滑板(3)螺紋連接。
4.根據權利要求3所述的一種空降空投降落傘智能操縱系統,其特征在于,所述防護框(2)的一側內壁上固定安裝有軸承(29),螺桿(19)的底端與軸承(29)的內圈固定連接。
5.根據權利要求4所述的一種空降空投降落傘智能操縱系統,其特征在于,所述防護框(2)的一側固定安裝有橫板(11),橫板(11)上轉動安裝有傳動桿(12),傳動桿(12)的底端固定安裝有第一錐齒輪(13)。
6.根據權利要求5所述的一種空降空投降落傘智能操縱系統,其特征在于,所述第一錐齒輪(13)上嚙合有第二錐齒輪(14),第二錐齒輪(14)固定套設于轉動軸(6)的外側。
7.根據權利要求6所述的一種空降空投降落傘智能操縱系統,其特征在于,所述傳動桿(12)的頂端延伸至腔體(18)內并固定安裝有第一齒輪(21),第一齒輪(21)上嚙合有第二齒輪(20),第二齒輪(20)固定套設于螺桿(19)的外側。
8.根據權利要求7所述的一種空降空投降落傘智能操縱系統,其特征在于,所述安裝板(1)的底部固定安裝有電機(15),電機(15)的輸出軸上固定安裝有第三齒輪(16),第三齒輪(16)上嚙合有第四齒輪(17),第四齒輪(17)固定套設于傳動桿(12)的外側。
9.根據權利要求8所述的一種空降空投降落傘智能操縱系統,其特征在于,所述防護框(2)的一側固定安裝有安裝盒(22),安裝盒(22)的底部內壁上固定安裝有風機(23),所述安裝盒(22)的頂部固定連接有連接管(26),安裝板(1)的底部開設有吹風口(27),吹風口(27)位于防護框(2)的內側。
10.根據權利要求9所述的一種空降空投降落傘智能操縱系統,其特征在于,所述安裝盒(22)的底部開設有進氣口(24),風機(23)的進風口與進氣口(24)連通,進氣口(24)內固定安裝有過濾網(25),密封板(8)覆蓋于進風口(24)的底部開口處。
技術總結
本發明屬于空降空投領域,尤其是一種空降空投降落傘智能操縱系統,針對現有的不便于對空降的準確性進行把控問題,現提出如下方案,其包括存儲模塊、關聯模塊、差異度計算模塊、分析模塊、判斷模塊、報警監測模塊、備用開傘模塊、投放定位模塊、環境分析模塊、軌跡預演模塊、位置比對模塊、傳輸模塊、反饋模塊、投放模塊、軌跡監測模塊、開傘監測模塊,所述投放定位模塊與環境分析模塊連接,環境分析模塊與關聯模塊和軌跡預演模塊連接,軌跡預演模塊與位置比對模塊和反饋模塊連接,所述反饋模塊與投放模塊連接,本發明可以對空投的準確性進行把控,同時結合關聯數據,可以分析出環境因素對空投的影響。
技術研發人員:任志剛,王峰,陳功
受保護的技術使用者:中國人民解放軍空軍航空大學航空基礎學院
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!