一種無GPS情況下無人機垂直投放拉起的控制方法與流程
本發明屬于無人機飛行控制領域,具體涉及一種無gps情況下無人機垂直投放拉起的控制方法。
背景技術:
1、在軍事行動中,無人機可能需要在復雜的電磁環境下執行任務,gps信號可能會受到干擾或被敵方屏蔽。在這種情況下,無人機需要依靠自身的傳感器和控制系統來實現姿態穩定和高度保持,以確保任務的順利完成。例如,在特種作戰中,無人機可能需要在沒有gps信號的情況下進行垂直投放,以實現隱蔽接近目標的目的。在一些特殊的環境中,如室內、地下、峽谷等,gps信號可能無法覆蓋或信號強度很弱。在這些環境中進行無人機作業時,需要依靠無gps情況下的姿態穩定和高度保持策略來確保無人機的安全飛行。例如,在室內進行無人機巡檢或救援任務時,gps信號可能無法使用,需要依靠視覺傳感器和慣性測量單元等傳感器來實現姿態穩定和高度保持。
2、即使在有gps信號的情況下,也不能完全依賴gps進行姿態穩定和高度保持,gps信號可能會受到天氣、地形等因素的影響而出現誤差或中斷。因此,設計無gps情況下的姿態穩定和高度保持策略可以提高無人機系統的可靠性和魯棒性,確保無人機在各種情況下都能安全飛行。
3、隨著傳感器技術和控制算法的不斷發展,無gps情況下的無人機飛行控制技術也在不斷進步。目前,無人機飛行的控制技術主要有三種:
4、(1)基于視覺的定位與導航:主要有光流法、視覺里程計和同時定位與地圖構件,光流法是通過分析無人機搭載的攝像頭所捕捉到的圖像序列中像素點的運動,計算出圖像中物體的運動速度和方向,進而推算出無人機自身的運動狀態;視覺里程計利用多幀圖像之間的特征匹配和幾何關系,估計無人機的位姿變化,同時定位與地圖構建(slam)無人機在飛行過程中,一邊構建周圍環境的地圖,一邊利用地圖來確定自身的位置;
5、(2)基于慣性測量單元(imu)的導航:imu通常由加速度計和陀螺儀組成。加速度計可以測量無人機的加速度,陀螺儀可以測量無人機的角速度,通過對加速度和角速度進行積分,可以得到無人機的速度和位置信息;
6、(3)基于地磁和高度傳感器的輔助導航:主要由地磁傳感器和高度傳感器(如氣壓計),地磁傳感器利用地球磁場來確定無人機的方向;高度傳感器(如氣壓計)通過測量大氣壓力來計算無人機的飛行高度。
7、目前無人機無gps下控制技術的主要問題有:
8、(1)定位精度問題:在復雜環境下,各種傳感器的測量誤差會累積,導致無人機定位精度下降;例如,在室內環境中,光線變化、遮擋物等會影響視覺傳感器的性能;在存在磁場干擾的區域,地磁傳感器的精度會大打折扣;不同傳感器融合時,如果融合算法不夠精確,也會降低定位精度;例如,在視覺和imu融合的過程中,若權重分配不合理,可能會導致最終定位結果不準確;
9、(2)環境適應性問題:許多無gps控制技術對環境要求較高,例如,基于視覺的方法在光照不足、紋理單一的環境(如黑暗的倉庫、雪地等)中效果不佳;基于地磁的方法在存在強磁場干擾的區域(如靠近大型電機設備的地方)無法正常工作,高度傳感器在天氣變化劇烈時,如暴風雨來臨前氣壓急劇變化,其測量的高度數據會出現較大偏差,影響無人機的飛行安全;
10、(3)計算資源和功耗問題:復雜的算法(如slam)需要大量的計算資源來處理數據。這就要求無人機搭載高性能的處理器,這不僅增加了無人機的成本,也增加了其重量。高性能處理器和復雜傳感器的運行會消耗大量電能,縮短無人機的續航時間,例如,運行視覺slam算法的無人機,其續航時間可能比不運行該算法時縮短30%-50%。
11、因此設計無gps情況下的姿態穩定和高度保持策略是無人機技術發展的一個重要方向,可以為未來的無人機應用提供更加可靠和靈活的解決方案。
技術實現思路
1、本發明提供一種無gps情況下無人機垂直投放拉起的控制方法,能夠在無人機垂直投放拉起階段無gps情況下達到姿態穩定和高度保持的效果。
2、為實現以上目的,本發明采用以下技術方案:
3、一種無gps情況下無人機垂直投放拉起的控制方法,包括以下步驟:
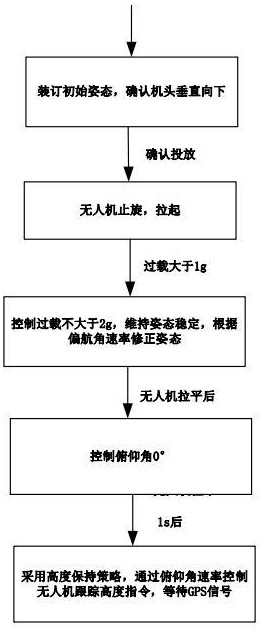
4、s1:裝訂初始姿態,確認機頭垂直向下;
5、s2:確認投放后無人機止旋,拉起;
6、s3:通過控制無人機過載大于1g且不大于2g,維持姿態穩定,根據偏航角速度控制滾轉角速度來修正姿態;
7、s4:無人機拉平后,控制俯仰角為0°,采用高度保持策略,通過俯仰角速率控制無人機跟蹤高度指令,等待gps信號。
8、以上所述步驟中,控制無人機過載過程中,為了控制過載大于1g且不大于2g,根據實際飛機過載時刻調整法向加速度指令:
9、,
10、其中,為空氣密度,為升力系數,s為機翼面積,m為無人機的質量,v為表速。
11、維持姿態穩定過程中主要利用偏航角速度來控制滾轉角速度來維持飛機姿態的穩定,滾轉角速度的指令為:
12、,
13、其中k為控制律參數,r為偏航角速率,v為真空速,g為重力加速度。
14、通過俯仰角速率控制無人機跟蹤高度指令中俯仰角速率控制為:
15、,
16、其中為空氣密度,?v為表速;為升力系數,s為機翼面積,m為無人機的質量。
17、有益效果:本發明提供了一種無gps情況下無人機垂直投放拉起的控制方法,拉起階段利用產生的偏航角速度,通過設計與偏航角相關的滾轉角指令從而實現對滾轉角的控制,通過設計滾轉角速率指令維持無人機姿態穩定,無人機拉平以后,采用高度保持策略,通過俯仰角速率控制無人機高度跟蹤高度指令;使無人機垂直投放拉起階段無gps情況下也達到姿態穩定和高度保持的效果。
技術特征:
1.一種無gps情況下無人機垂直投放拉起的控制方法,其特征在于,包括以下步驟:
2.根據權利要求1所述的無gps情況下無人機垂直投放拉起的控制方法,其特征在于,拉起階段當俯仰角小于0°,維持過載和無人機姿態穩定。
3.根據權利要求2所述的無gps情況下無人機垂直投放拉起的控制方法,其特征在于,為了控制無人機過載的最大值和最小值,根據實際飛機過載時刻調整法向加速度指令:
4.根據權利要求3所述的無gps情況下無人機垂直投放拉起的控制方法,其特征在于,控制無人機過載大于1g且不大于2g。
5.根據權利要求1或3所述的無gps情況下無人機垂直投放拉起的控制方法,其特征在于,利用偏航角速度來控制滾轉角速度來維持飛機姿態的穩定,滾轉角速度的指令為:
6.根據權利要求5所述的無gps情況下無人機垂直投放拉起的控制方法,其特征在于,無人機拉平后,控制俯仰角為0°,一直不斷用偏航角速度控制滾轉角速度來維持飛機姿態穩定。
7.根據權利要求6所述的無gps情況下無人機垂直投放拉起的控制方法,其特征在于,通過俯仰角速率控制無人機跟蹤高度指令中,俯仰角速率控制為:
技術總結
本發明公開了一種無GPS情況下無人機垂直投放拉起的控制方法,屬于無人機飛行控制領域,能夠在無人機垂直投放拉起階段無GPS情況下達到姿態穩定和高度保持的效果。本發明針對無人機垂直投放拉起階段無GPS情況下的姿態穩定和高度保持策略,在無人機機頭向下的狀態下,通過控制過載維持姿態穩定,通過偏航角速率來設計滾轉角速率來維持飛機姿態穩定,在無人機拉平以后,通過俯仰角速率控制無人機高度跟蹤高度指令,使無人機垂直投放拉起階段無GPS情況下也達到姿態穩定和高度保持的效果。
技術研發人員:呂全輝,周瓚,郭思愷,楊娜,盧照臨,劉瑞娟,呂偉業,陳弈澄,王猛,董新蕾
受保護的技術使用者:南京天晴航空航天科技有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!