一種一進二出系統(tǒng)的PID控制方法和裝置與流程
本發(fā)明涉及自動控制,具體涉及一種一進二出系統(tǒng)的pid控制方法和裝置。
背景技術:
1、工業(yè)控制領域,為實現(xiàn)工藝指標的精確控制,常配置一進二出的工藝控制系統(tǒng),并提出以下工藝控制需求:
2、(1)如采用大口徑閥門與小口徑閥門結合,或者大通量調(diào)速泵與小通量調(diào)速泵結合;
3、(2)出現(xiàn)大擾動時,利用大口徑閥門或者大通量調(diào)速泵及時調(diào)節(jié)響應;
4、(3)大擾動消失后,要求大口徑閥門或者大通量調(diào)速泵盡量少參與調(diào)節(jié),而主要采用小口徑閥門或者小通量調(diào)速泵實現(xiàn)精細調(diào)節(jié);
5、(4)在沒有大擾動期間,要求小口徑閥門或者小通量調(diào)速泵盡可能運行于可調(diào)區(qū)間的中心值附近,以提高響應特性和控制精度。
6、這種需求在工業(yè)領域普遍存在,如果能很好解決能帶來較為廣泛的意義。
7、目前針對上述工藝控制需求,一般采用以下方案:
8、(1)用mvb指代大口徑調(diào)節(jié)閥或者大通量調(diào)速泵控制輸出,用mvs指代小口徑調(diào)節(jié)閥或者小通量調(diào)速泵控制輸出;
9、(2)pidb為采用mvb作為輸出的pid控制器;pids為采用mvs作為輸出的pid控制器;
10、(3)基于err、mvb、mvs等數(shù)值制定切換規(guī)則,實現(xiàn)不同偏差、不同mvb、mvs值時,pidb和pids的控制切換,以實現(xiàn)上述工藝控制需求。
11、然后上述方案的缺點如下:
12、(1)切換規(guī)則復雜,控制方案與工藝需求的關系不夠直觀和線性,現(xiàn)場調(diào)試、維護困難;
13、(2)控制切換過程一般存在跳變,因而控制精度欠佳。
14、采用如圖1和圖2所示的常規(guī)分程控制無法滿足工藝控制需求。
技術實現(xiàn)思路
1、本發(fā)明為了克服以上技術的不足,提供了一種一進二出系統(tǒng)的pid控制方法和裝置,通過一種直觀、線性的解決方案,既滿足了有、無大擾動時,系統(tǒng)對mvb和mvs的調(diào)節(jié)需求;又滿足了大擾動消除后,mvb少參與調(diào)節(jié),mvs運行在可調(diào)區(qū)間中心值附近的要求。
2、本發(fā)明克服其技術問題所采用的技術方案是:
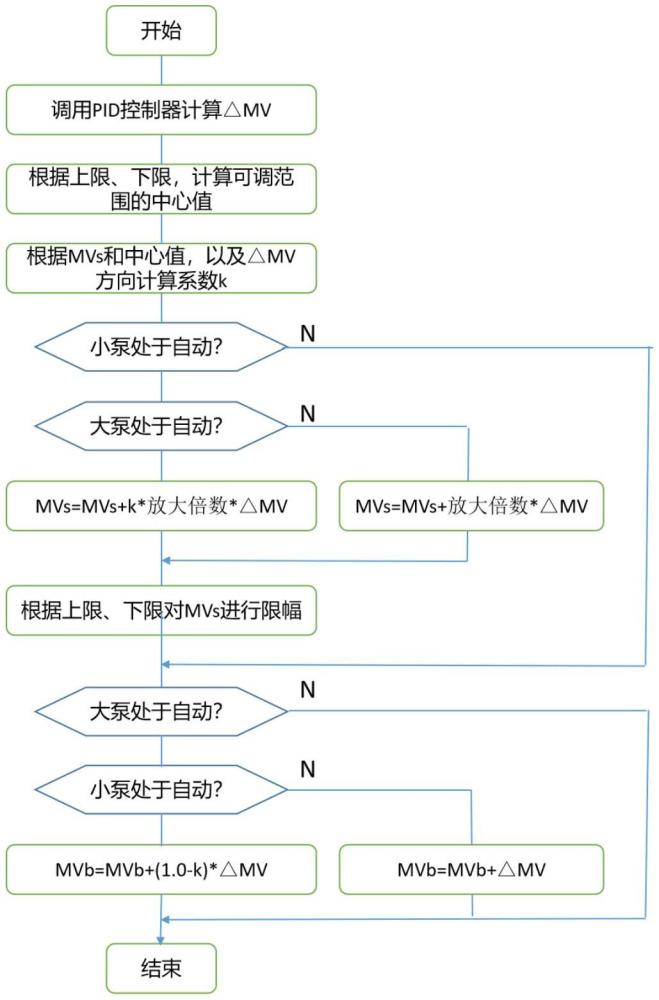
3、本發(fā)明的第一個方面提出的一種一進二出系統(tǒng)的pid控制方法,所述一種一進二出系統(tǒng)至少包括pid控制器,所述pid控制方法包括,基于pid控制器計算控制增量,所述pid控制器用于基于一個測量輸入至少控制兩路控制輸出,所述兩路控制輸出分別對應第一輸出量和第二輸出量,其中第一輸出量的穩(wěn)態(tài)增益大于等于第二輸出量;基于第二輸出量的預設調(diào)節(jié)上限和預設調(diào)節(jié)下限確定中心值;基于第二輸出量的預設調(diào)節(jié)上限、預設調(diào)節(jié)下限、中心值和控制增量確定系數(shù)k,包括:若第二輸出量mvs大于中心值,基于第二控制輸出量的預設調(diào)節(jié)上限和中心值采用公式(1)確定系數(shù)k,若控制增量小于0時,則系數(shù)k等于1,若第二輸出量mvs小于等于中心值,基于第二控制輸出量的預設調(diào)節(jié)下限和中心值采用公式(2)確定系數(shù)k,若控制增量大于0時,則系數(shù)k等于1,其中,mvs為第二輸出量,
4、k=((預設調(diào)節(jié)上限-中心值)-(mvs-中心值))/(預設調(diào)節(jié)上限-中心值)?(1)
5、k=((中心值-預設調(diào)節(jié)下限)-(中心值-mvs))/(中心值-預設調(diào)節(jié)下限)?(2)
6、基于系數(shù)k分別計算并得到第一輸出量和第二輸出量。
7、利用系數(shù)使一進二出系統(tǒng)二個mv實現(xiàn)線性切換,避免輸出跳變,只采用一個pid控制器即可實現(xiàn)一進二出系統(tǒng)控制,參數(shù)更容易整定。
8、進一步的,所述基于第二輸出量的預設調(diào)節(jié)上限、預設調(diào)節(jié)下限、中心值和控制增量確定系數(shù)k,還包括,對系數(shù)k進行限幅,使系數(shù)k不大于1.0,不小于0.0。
9、進一步的,所述基于系數(shù)k分別計算并得到第一輸出量和第二輸出量,具體包括:分別基于公式(3)和公式(4)計算第一輸出量和第二輸出量,
10、mvb′=mvb+(1.0-k)*△mv?????(3)
11、mvs′=mvs+k?*放大倍數(shù)*△mv???(4)
12、其中,mvb為當前第一輸出量,mvb′為待輸出第一輸出量,mvs為當前第二輸出量,mvs′為待輸出第二輸出量,放大倍數(shù)為mvb的穩(wěn)態(tài)增益/mvs的穩(wěn)態(tài)增益,△mv為控制增量。
13、進一步的,還包括依次判斷控制當前第二輸出量的狀態(tài)和控制第一輸出量的狀態(tài),從而依次計算第二輸出量和第一輸出量,其中,計算第二輸出量具體包括:若控制第二輸出量的狀態(tài)為手動,則不對第二輸出量進行操作;若控制第二輸出量的狀態(tài)為自動,則判斷控制第一輸出量的狀態(tài),若控制第一輸出量的狀態(tài)為自動,則基于所述公式(4)計算第二輸出量;若控制第一輸出量的狀態(tài)為手動,則基于公式(5)計算第二輸出量,mvs′=mvs+放大倍數(shù)*△mv(5),基于預設調(diào)節(jié)上限和預設調(diào)節(jié)下限對第二輸出量進行限制幅度。
14、進一步的,還包括依次判斷控制當前第二輸出量的狀態(tài)和控制第一輸出量的狀態(tài),從而依次計算第二輸出量和第一輸出量,
15、其中,計算第一輸出量具體包括:
16、若控制第一輸出量的狀態(tài)為手動,則不對第一輸出量進行操作;
17、若控制第一輸出量的狀態(tài)為自動,則判斷控制第二輸出量的狀態(tài),
18、若控制第二輸出量的狀態(tài)為自動,則基于所述公式(3)計算第一輸出量;
19、若控制第二輸出量的狀態(tài)為手動,則基于公式(6)計算第一輸出量,
20、mvb′=mvb+△mv?????(6)。
21、進一步的,還包括將所述中心值替換為預設值,所述預設值為預設調(diào)節(jié)下限和預設調(diào)節(jié)上限范圍內(nèi)的任意值。
22、系數(shù)k與mvs與可調(diào)區(qū)間中心值的相對位置有關和△mv變化方向有關。mvs越偏離中心值,系數(shù)越小,△mv變化方向使mvs趨向可調(diào)區(qū)間中心值,則將系數(shù)k設置為1.0。當mvs趨向可調(diào)區(qū)間的上限或者下限時,mvs的調(diào)節(jié)越來越慢,同時mvb的調(diào)節(jié)越來越快;當mvs趨向可調(diào)區(qū)間中心值時mvs全速調(diào)節(jié),mvb保持不動。
23、本發(fā)明的另一個方面還提出了一種一進二出系統(tǒng)的pid控制裝置,用于運行上述一種一進二出系統(tǒng)的pid控制方法,包括:pid模塊,系數(shù)計算模塊和線性切換模塊,所述pid模塊根據(jù)一個測量輸入至少控制兩路控制輸出,以及基于pid參數(shù)和控制偏差計算得到控制增量;所述系數(shù)計算模塊用于計算中心值,并基于預設調(diào)節(jié)上限、預設調(diào)節(jié)下限、可調(diào)范圍中心值和控制增量確定系數(shù)k;所述線性切換模塊用于基于系數(shù)k切換控制第一輸出量和第二輸出量。
24、本發(fā)明的有益效果是:
25、1、利用系數(shù)和放大倍數(shù)實現(xiàn)一個pid控制器同時控制一進二出系統(tǒng)二個mv;
26、2、利用系數(shù)使一進二出系統(tǒng)二個mv實現(xiàn)線性切換,避免輸出跳變;
27、3、只需要采用一個pid控制器即可實現(xiàn)一進二出系統(tǒng)控制,參數(shù)更容易整定;
28、4、既滿足了有、無大擾動時,系統(tǒng)對mvb和mvs的調(diào)節(jié)需求;又滿足了大擾動消除后,mvb少參與調(diào)節(jié),mvs運行在可調(diào)區(qū)間中心值附近的要求。
- 還沒有人留言評論。精彩留言會獲得點贊!