一種數(shù)據(jù)驅動的無人機飛控系統(tǒng)實時缺陷預測系統(tǒng)及方法與流程
本發(fā)明涉及無人機控制,尤其涉及一種數(shù)據(jù)驅動的無人機飛控系統(tǒng)實時缺陷預測系統(tǒng)及方法。
背景技術:
1、無人機飛行控制系統(tǒng)(flight?control?system,fcs)是實現(xiàn)無人機自主飛行、任務執(zhí)行和安全保障的核心技術之一。無人機在飛行過程中由于受到復雜的環(huán)境因素和自身硬件的限制,容易發(fā)生各種故障,這些故障可能導致飛行中斷,甚至發(fā)生墜機事故。因此,如何實時預測無人機飛行控制系統(tǒng)中的潛在故障,提高其安全性和穩(wěn)定性,已成為無人機技術領域亟待解決的問題。
2、例如公開號為cn116954197a的中國專利針對現(xiàn)有技術并不能充分提取參數(shù)與故障之間的映射關系,進而使得缺陷預測不準確的問題,首先采用鯨魚優(yōu)化算法生成大量樣本數(shù)據(jù),保證高覆蓋率的涵蓋飛控系統(tǒng)的缺陷;其次通過參數(shù)組合提取方法,提取出具有相關性的參數(shù);再次由基于卷積運算的特征提取方法提取出具有相關性的參數(shù)與故障之間的映射關系;最后由卷積神經(jīng)網(wǎng)絡建立飛控傳感器監(jiān)測參數(shù)與飛控系統(tǒng)缺陷的模型。由該模型對飛控系統(tǒng)的缺陷進行預測,可以取得非常高的預測準確率。
3、以上專利存在本背景技術提出的問題:當前技術缺乏有效的傳感器數(shù)據(jù)實時驗證機制,難以快速識別傳感器故障和異常數(shù)據(jù),從而影響系統(tǒng)對飛行狀態(tài)的判斷準確性,為解決以上問題,本技術設計了一種數(shù)據(jù)驅動的無人機飛控系統(tǒng)實時缺陷預測系統(tǒng)及方法。
技術實現(xiàn)思路
1、本發(fā)明所要解決的技術問題是針對現(xiàn)有技術的不足,提供了一種數(shù)據(jù)驅動的無人機飛控系統(tǒng)實時缺陷預測系統(tǒng)及方法,系統(tǒng)包括數(shù)據(jù)采集模塊、傳感器驗證模塊、缺陷預測模塊、可信度分析模塊和飛行控制優(yōu)化模塊。傳感器驗證模塊通過數(shù)據(jù)一致性、時序異常檢測和環(huán)境關聯(lián)分析識別傳感器數(shù)據(jù)異常并區(qū)分故障類型。缺陷預測模塊利用機器學習對驗證后的數(shù)據(jù)進行分析,預測潛在故障。可信度分析模塊對預測結果進行驗證并生成可信度評分。飛行控制優(yōu)化模塊根據(jù)可信度評分選擇優(yōu)化控制策略,調整飛行參數(shù)或執(zhí)行返航、降落等安全操作。本發(fā)明提高了無人機在復雜環(huán)境中的故障識別和預測能力,增強了飛行安全性和系統(tǒng)可靠性。
2、為實現(xiàn)上述目的,本發(fā)明提供如下技術方案:
3、一種數(shù)據(jù)驅動的無人機飛控系統(tǒng)實時缺陷預測系統(tǒng),所述系統(tǒng)包括數(shù)據(jù)采集模塊、傳感器驗證模塊、缺陷預測模塊、可信度分析模塊和飛行控制優(yōu)化模塊;
4、所述傳感器驗證模塊內配置有傳感器故障檢測策略,所述傳感器故障檢測策略用于對所述數(shù)據(jù)采集模塊的輸出進行檢測,判斷傳感器是否存在故障;
5、所述缺陷預測模塊內配置有數(shù)據(jù)處理策略,所述數(shù)據(jù)處理策略用于對經(jīng)過驗證的傳感器數(shù)據(jù)進行處理,通過機器學習算法構建缺陷預測模型,根據(jù)所述缺陷預測模型預測無人機在未來飛行中的潛在故障;
6、所述可信度分析模塊,用于對所述缺陷預測模塊輸出的預測結果進行可信度評估,生成可信度評分。
7、所述傳感器驗證模塊用于從傳感器數(shù)據(jù)中識別出異常情況并區(qū)分是否存在傳感器故障的情況,具體包括:
8、數(shù)據(jù)一致性檢查單元,用于對傳感器數(shù)據(jù)進行一致性檢測,通過分析不同時間段的數(shù)據(jù)變化趨勢和特征,識別是否存在異常信號;
9、時序異常檢測單元,用于對存在異常信號的傳感器數(shù)據(jù)的時序模式進行分析,判斷傳感器數(shù)據(jù)是否符合正常時序模式;
10、環(huán)境關聯(lián)單元,用于對不符合正常時序模式的傳感器數(shù)據(jù)與外部環(huán)境數(shù)據(jù)進行相關性分析,判斷異常傳感器數(shù)據(jù)是否與環(huán)境因素相關,如果不相關,表示傳感器存在故障;
11、所述傳感器故障檢測策略包括數(shù)據(jù)完整性檢查邏輯、時序穩(wěn)定性分析邏輯和環(huán)境關聯(lián)分析邏輯;
12、所述數(shù)據(jù)完整性檢查邏輯配置于所述數(shù)據(jù)一致性檢查單元內,所述時序穩(wěn)定性分析邏輯配置于所述時序異常檢測單元內,所述環(huán)境關聯(lián)分析邏輯配置于所述環(huán)境關聯(lián)單元內。
13、所述時序穩(wěn)定性分析邏輯用于通過時序模型檢測數(shù)據(jù)的穩(wěn)定性,判斷數(shù)據(jù)是否符合正常的時序模式,具體包括:
14、構建混合時序模型,通過所述混合時序模型對所述傳感器數(shù)據(jù)進行處理,輸出短期異常得分與趨勢性異常得分;
15、根據(jù)無人機的飛行狀態(tài)設定權重系數(shù),將所述短期異常得分與趨勢性異常得分進行加權計算,生成綜合異常得分;
16、將所述綜合異常得分與風險閾值進行對比,如果大于或等于風險閾值,將該傳感器數(shù)據(jù)對應的傳感器標記為故障傳感器,如果小于風險閾值,將該傳感器數(shù)據(jù)對應的傳感器標記為正常傳感器。
17、所述混合時序模型,包括:
18、短期檢測層,用于將傳感器數(shù)據(jù)合并為一個線性序列,通過滑動窗口對窗口內的線性序列進行自回歸預測,獲取預測窗口內的下一數(shù)據(jù)點,通過計算預測值與實際值的殘差,獲取每個窗口內的短期異常得分;
19、長期檢測層,用于通過雙向長短期記憶神經(jīng)網(wǎng)絡對傳感器數(shù)據(jù)的歷史序列進行學習,獲取長期預測值,計算傳感器數(shù)據(jù)實際值與長期預測值的偏差,逐步累積偏差值生成趨勢性異常得分;
20、自學習更新層,用于根據(jù)當前環(huán)境和歷史異常模式進行參數(shù)調整。
21、所述環(huán)境關聯(lián)分析邏輯用于判斷異常數(shù)據(jù)是否受到外部環(huán)境的影響,具體包括:
22、通過主成分分析法從外部環(huán)境數(shù)據(jù)中提取環(huán)境特征;
23、根據(jù)歷史飛行數(shù)據(jù)和歷史環(huán)境參數(shù),構建環(huán)境關聯(lián)模型;
24、將所述環(huán)境特征作為所述環(huán)境關聯(lián)模型的輸入?yún)?shù),通過所述環(huán)境關聯(lián)模型對所述環(huán)境特征進行訓練,輸出關聯(lián)數(shù)據(jù);
25、計算所述關聯(lián)數(shù)據(jù)與不符合正常時序模式的傳感器數(shù)據(jù)之間的殘差,對所述殘差進行波動性分析,判斷是否在預設的環(huán)境影響范圍內,如果殘差波動不在范圍內,表示傳感器存在故障,如果殘差波動在范圍內,表示傳感器數(shù)據(jù)的異常與環(huán)境相關,不存在故障。
26、所述缺陷預測模塊用于對經(jīng)過傳感器驗證模塊確認的正常傳感器數(shù)據(jù)進行分析,預測無人機在飛行過程中的潛在故障,具體包括:
27、數(shù)據(jù)預處理單元,用于對經(jīng)過驗證的傳感器數(shù)據(jù)進行數(shù)據(jù)清洗、降噪、平滑和歸一化處理;
28、特征提取單元,用于從預處理后的數(shù)據(jù)中提取特征變量,并將提取的特征變量升維為高維特征向量;
29、缺陷預測單元,用于構建并訓練缺陷預測模型,對特征提取單元生成的特征向量進行分析,預測無人機未來飛行的故障;
30、所述數(shù)據(jù)處理策略包括特征提取邏輯和缺陷預測邏輯,所述缺陷預測邏輯用于根據(jù)缺陷預測模型對所述高維特征向量進行訓練,輸出預測結果;
31、所述特征提取邏輯配置于所述特征提取單元內,所述缺陷預測邏輯配置于所述缺陷預測單元內。
32、所述特征提取邏輯,包括:
33、將傳感器數(shù)據(jù)分解為短時頻率信號,通過傅里葉變換計算每個時間段內的頻率成分,提取瞬時變化特征;
34、根據(jù)小波變換將傳感器信號分解為多個小波系數(shù)層級,通過小波系數(shù)提取每個小波系數(shù)層級的多尺度變化特征;
35、將所述瞬時變化特征和所述多尺度變化特征進行聚合,構成特征向量,并通過非線性映射將特征向量升維至高維特征空間。
36、所述缺陷預測模型,包括:
37、卷積特征提取層,用于從高維特征向量中提取空間特征和時間特征;
38、時序模式學習層,用于從高維特征向量中學習時間序列模式,
39、卷積池化層,用于通過3×3大小的卷積核將所述空間特征和時間特征和所述時間序列模式進行卷積,并通過relu激活函數(shù)和最大池化操作,得到2×2大小的映射特征;
40、輸出層,用于將映射特征展平為一個特征向量,通過多層感知機對所述特征向量進行多類別分類,生成每種潛在故障類型的概率分布,對每個故障類型生成置信度評分,并按置信度評分進行故障排序,將最高置信度評分對應的故障類型作為預測結果。
41、所述可信度分析模塊,包括:
42、結果驗證單元,用于通過與歷史數(shù)據(jù)進行對比,對缺陷預測模塊的輸出結果進行驗證,輸出驗證結果;
43、異常穩(wěn)定性分析單元,用于對預測結果中的異常情況進行穩(wěn)定性評估,輸出分析結果;
44、可信度評分單元,用于根據(jù)所述驗證結果和所述分析結果,計算缺陷預測模塊輸出的可信度評分;
45、所述飛行控制優(yōu)化模塊用于對可信度評分進行評估,對潛在故障進行優(yōu)化控制,具體包括:
46、風險等級評估單元,用于對所述可信度評分進行風險等級評估,具體包括故障嚴重性和飛行可行性;
47、控制策略決策單元,用于根據(jù)所述風險等級評估單元的輸出結果,選擇對應的優(yōu)化控制策略;
48、參數(shù)調整單元,用于根據(jù)所述控制策略決策單元輸出的優(yōu)化控制策略,對飛控系統(tǒng)的參數(shù)進行調整。
49、一種數(shù)據(jù)驅動的無人機飛控系統(tǒng)實時缺陷預測方法,所述方法具體步驟如下:
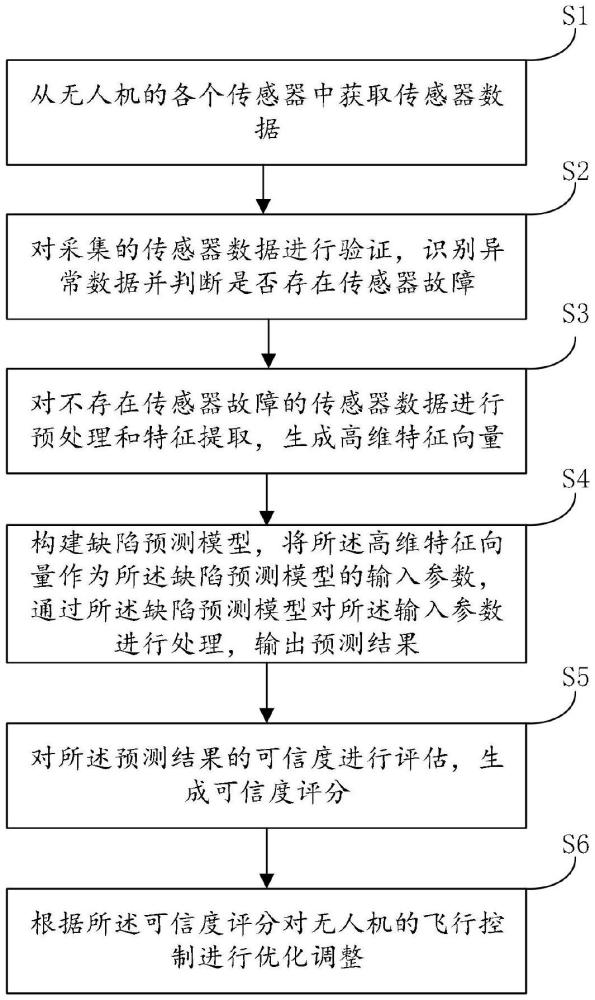
50、s1:從無人機的各個傳感器中獲取傳感器數(shù)據(jù);
51、s2:對采集的傳感器數(shù)據(jù)進行驗證,識別異常數(shù)據(jù)并判斷是否存在傳感器故障;
52、s3:對不存在傳感器故障的傳感器數(shù)據(jù)進行預處理和特征提取,生成高維特征向量;
53、s4:構建缺陷預測模型,將所述高維特征向量作為所述缺陷預測模型的輸入?yún)?shù),通過所述缺陷預測模型對所述輸入?yún)?shù)進行處理,輸出預測結果;
54、s5:對所述預測結果的可信度進行評估,生成可信度評分;
55、s6:根據(jù)所述可信度評分對無人機的飛行控制進行優(yōu)化調整。
56、與現(xiàn)有技術相比,本發(fā)明的有益效果是:
57、本發(fā)明實現(xiàn)了對無人機飛行過程中的潛在故障的有效識別和預測,提升了數(shù)據(jù)異常的準確判斷和故障類型的區(qū)分能力。利用機器學習算法對傳感器數(shù)據(jù)進行分析,可提前識別潛在故障,支持及時采取預防措施。
- 還沒有人留言評論。精彩留言會獲得點贊!