一種再入滑翔飛行器軌跡預測方法
本發明涉及再入滑翔飛行器軌跡預測,具體為一種再入滑翔飛行器軌跡預測方法。
背景技術:
1、再入滑翔飛行器(reentry?glide?vehicle,rgv)作為一種全球快速打擊武器,在臨近空間的長時間飛行具有速度快、突防能力強和打擊范圍廣的特點,是各軍事強國爭相研究的熱點,同時,對防御方的預警、探測、跟蹤和攔截提出了新的挑戰,因此針對再入滑翔飛行器的軌跡預測研究具有重要意義。
2、和彈道目標不同,rgv再入滑翔時會進行大范圍的高速機動,防御方在獲取飛行器軌跡信息后,為降低攔截彈的機動過載、提高防御武器的作戰效能,通常采用基于預測命中點的零控攔截策略,這對rgv的軌跡預測精度和預測時長提出了很高要求。
3、從預測機制上,針對rgv的軌跡預測技術主要分為基于數據分析和基于模型兩大類軌跡預測方法。第一種方法通過分析飛行器軌跡的歷史跟蹤數據來進行預測,具有短期預測精度高、方法實現簡單的特點,但缺乏深層的模型約束,難以滿足高精度、中長期的軌跡預測需求。第二種方法從預測機理上主要分為參數估計、模式辨識和意圖推斷三種類型。其中,參數估計把rgv看作非合作目標,將飛行器質量、受力面積、氣動系數等未知信息整合為一個參數,借助動力學模型實現對rgv的迭代預測。在先驗信息不足的情況下,確定合適且易于預測的參數是該方法的關鍵。目前常用的預測參數有升阻比、氣動參數、控制變量等,其中升阻比在呈線性變化時預測效果較好,參數局限性較大,而氣動參數和控制變量由于和飛行器姿態本身近似呈線性,在rgv的軌跡預測中得到了廣泛應用。然而,rgv在再入過程中,會以特定的機動模式進行突防或者根據預先確定的攻擊意圖來實時改變運動規律,此時參數估計的方法便不再適用。基于此,諸多學者對基于再入滑翔飛行器模式辨識和意圖推斷的軌跡預測方法進行了十分有益的探索。
4、在目標機動模式辨識方面,根據不同的機動模式預先建立相應的預測模型,然后通過識別技術進行模型匹配,已被證實是切實可行的方向。hu等基于向量自回歸模型對rgv的氣動參數之間的耦合關系進行建模,為各種機動模式提供了結構簡單、形式統一的精確描述方法;程云鵬等根據機動模式的定義,生成機動模式集用來訓練svm,實現了對目標機動軌跡的模式識別和預測;sun等針對簡化條件下的目標縱向跳躍滑翔彈道,用線性衰減項和幅度衰減正弦項組成了高度和速度等變量的解析表達式,借助lstm網絡實現了軌跡預測管道的計算。由于再入滑翔飛行器的制導通常具有目的性,通過引入攻擊意圖,對機動模式辨識方法的預測結果進行修正,可進一步提高軌跡預測精度。
5、從對抗博弈的角度出發,rgv的制導總是以最小的代價取得最大的收益。將飛行器的軌跡預測與作戰博弈相互關聯,量化在不同機動模型下rgv攻擊不同要地的損失和收益,可估計飛行器可達區內攻擊要地和機動模型的概率分布,為長時高精度軌跡預測提供數據支撐。在已知飛行器攻擊某要地的情況下,受限于制導任務和機動能力,不考慮禁飛區的存在,飛行器的軌跡通常具有以下特征:(1)rgv與要地的航程會隨著飛行時間的增加而遞減;(2)rgv的航向角始終指向要地或在以要地為中心的一段范圍內波動。基于此,xu等通過深度神經網絡建立了飛行器初始狀態、控制量和飛行區域的關系,實現了對飛行器攻擊意圖的快速推斷。然而,rgv一般攻擊的是高價值要地,要地附近部署的探測雷達和防空武器等會形成對rgv來說高風險的禁飛區。為降低飛行風險、完成打擊任務,rgv通常會采取c型機動以規避禁飛區,上述所描述的兩個飛行特征則不成立。針對禁飛區存在情況下的rgv軌跡預測,學者們作了一定程度的探索。張凱等在假定攻擊意圖的情況下,基于航向偏差角、剩余航程、要地價值和危險區半徑構造意圖代價函數,推導了機動模式和運動狀態的遞推公式,實現了目標機動不確定條件下的軌跡預測。hu等針對機動模式突變的問題,在文獻[張凱,熊家軍,李凡,等.基于意圖推斷的高超聲速滑翔目標貝葉斯軌跡預測[j].宇航學報,2018,39(11):1258-1265]的基礎上,通過意圖代價函數和貝葉斯原理將軌跡預測問題轉化為求解可達區內目標可能經過區域的概率,算法不依賴目標動力學過程,短期預測精度較高,但耗時較長,不利于在線預測;李佳麗等在文獻[hu?y?d,gao?c?s,li?jl,et?al.noveltrajectory?prediction?algorithms?for?hypersonic?gliding?vehicles?based?onmaneuver?mode?on-line?identification?and?intent?inference[j].meas?scitechnol,2021,32(11):115012]的基礎上,對意圖代價函數進行了改進,并分別構建了縱向和側向的時變預測模型集,實現了rgv的多模型多意圖融合軌跡預測,但代價系數需人為給定,算法不具備普適性。
6、所以我們提出了一種再入滑翔飛行器軌跡預測方法,以便于解決上述中提出的問題。
7、本背景技術所公開的上述信息僅僅用于增加對本發明背景技術的理解,因此,其可能包括不構成本領域普通技術人員已知的現有技術。
技術實現思路
1、本發明的目的在于提供一種再入滑翔飛行器軌跡預測方法,以解決上述背景技術提出的問題。
2、為實現上述目的,本發明提供如下技術方案:一種再入滑翔飛行器軌跡預測方法,包括如下步驟:
3、step1、初始化:
4、1)初始化雷達參數、預測參數、禁飛區和意圖位置信息;
5、2)初始化濾波算法參數和參數模型后驗概率;
6、step2、構建參數模型集:
7、1)根據cs-ukf濾波算法對飛行器進行跟蹤,得到參數模型μf;
8、2)利用最小二乘法擬合得到預測的μp,構建rgv參數模型集λ;
9、step3、推斷攻擊意圖:
10、1)計算rgv的可達區,確定攻擊要地集合θ;
11、2)對可達區內每個要地計算跟蹤階段的距離維和角度維意圖代價函數idis、iangle;
12、3)構建多維意圖融合模型,得到飛行器的攻擊概率分布,確定后驗概率不低于先驗概率的要地ηt;
13、step4、推斷參數模型:
14、1)對預測階段的rgv參數模型μj計算距離維和角度維意圖代價函數idis、iangle;
15、2)根據多維意圖融合模型,推斷最大后驗概率的參數模型μ;
16、step5、軌跡預測:
17、1)結合rgv動力學方程組迭代積分得到預測軌跡,將多意圖預測軌跡進行融合;
18、2)當預測時間達到規劃時間后,保存數據并結束預測,否則返回step4。
19、優選的,所述step2中,定義濾波算法估計的縱向參數模型為最小二乘擬合得到的縱向參數模型為最終預測所用的縱向參數模型為由于估計氣動參數u時會產生誤差,為提高預測精度,假設預測的縱向參數模型均滿足以擬合結果為均值的高斯分布,即
20、
21、式中:k為預測的時刻,和分別表示阻力參數、升力參數和傾側角幅值的方差;
22、綜上,根據上式每個參數隨機選取n個組成縱向參數模型,結合傾側角符號,最終確定2n3個參數模型,定義模型集為λ。
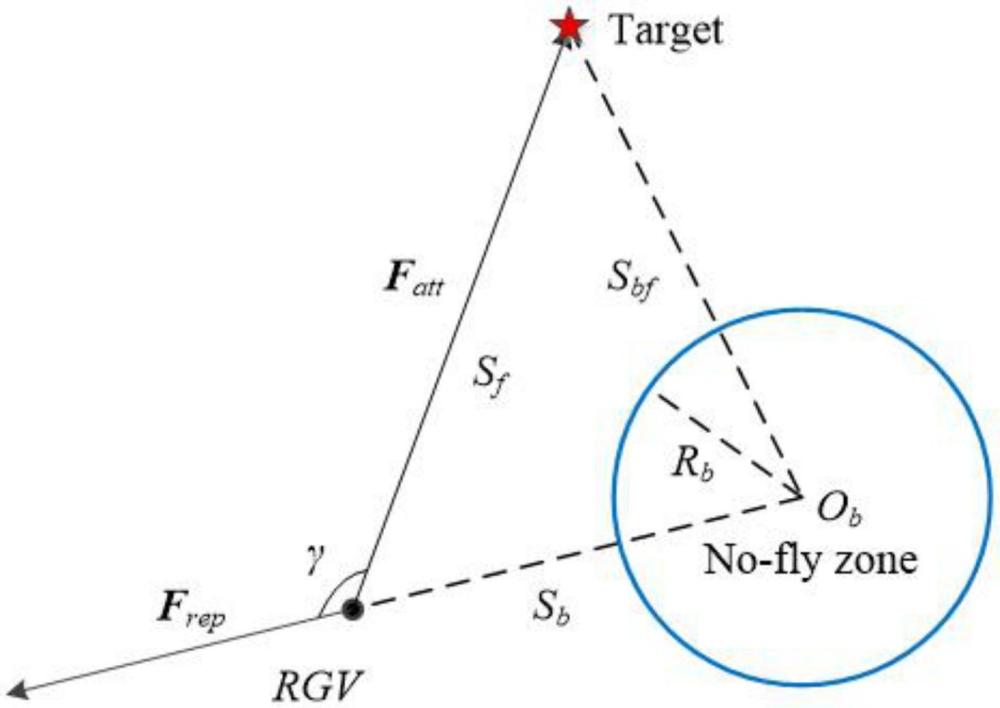
23、優選的,所述step3中,飛行器到真實意圖位置的距離通常是逐漸減小的,但在規避禁飛區時,距離禁飛區越近的要地,對飛行器來說收益和風險同樣也越高;因此,單一的憑借航程來推斷飛行器的意圖是十分片面的。借鑒物理學中電磁場的概念,在橫向平面中構建一個人工虛擬勢場,攻擊要地產生引力場,禁飛區產生斥力場,飛行器同時受到引力和斥力的作用,并且盡可能的朝著合力增大的方向運動,構建距離維意圖代價函數包括:
24、1)斥力場
25、設計禁飛區的斥力勢函數為
26、
27、式中:kb為斥力場常數,sb為飛行器到禁飛區中心的航程;
28、相應的飛行器受到禁飛區的斥力為斥力勢函數的負梯度
29、
30、式中:ib為禁飛區中心指向飛行器的單位矢量,c1為避免奇異的正常數;
31、考慮到飛行器的機動能力和禁飛區的影響范圍,對斥力公式修正為
32、
33、式中:ηb為斥力調節因子。為保證斥力的連續性,以飛行器的瞬時轉彎圓和禁飛區的位置關系構造ηb
34、
35、當存在多個禁飛區影響飛行器軌跡時,選擇斥力最大的作為主禁飛區;
36、frep,m=max(frep,1,frep,2,…,frep,n)?(26)
37、式中:n為影響飛行器軌跡的禁飛區的個數;
38、2)引力場
39、設計攻擊要地的引力勢函數為
40、
41、式中:kg為引力場常數,sbf為攻擊要地到主禁飛區中心的航程,sf為飛行器到攻擊要地的航程;
42、相應的飛行器受到攻擊要地的引力為引力勢函數的負梯度
43、
44、式中:if為飛行器指向攻擊要地的單位矢量,c2為避免奇異的正常數;
45、因此,飛行器受到的合力為
46、f=fatt+frep,m????????(29)
47、構造距離維度的意圖代價函數為
48、idis=|f|cos<f,fatt>=|fatt+frep,m|cos<f,fatt>=fatt+|frep,m|cos<fatt,frep,m>??(30)
49、定義引力fatt和斥力frep,m之間的夾角為γ,rgv在人工勢場中受力的示意圖如圖1所示。上式表明合力f在引力fatt上的分量越大,意圖代價idis越大。
50、優選的,所述step3中,構建角度維意圖代價函數包括:
51、當飛行器為完成制導任務規避禁飛區時,速度矢量到真實攻擊意圖的航向偏角可能會偏大,因此提出偽航向偏角的概念,即
52、δψ=δψf-λδψb????(31)
53、式中:δψf為飛行器到攻擊要地的實際航向偏角,δψb為禁飛區影響下的修正值,λ為修正系數;δψf的計算公式為
54、δψf=ψ-ψf????(32)
55、式中:ψ為飛行器的航向角,ψf為飛行器指向攻擊要地的航向角;
56、由于在無禁飛區存在下,飛行器的速度矢量通常在指向真實意圖的航向角的附近,因此禁飛區影響的這部分航向偏角要被修正掉,以提高禁飛區保護的要地的角度代價;δψb的計算公式為
57、
58、式中:ψed為航向偏角走廊范圍;
59、修正系數的計算公式為
60、
61、式中:c3為防止修正系數奇異的正常數。在角度維度構造的意圖代價函數為
62、iangle=e-δψ???????(35)
63、由上式可知,當飛行器的航向角和要地位置越靠近禁飛區邊界,因禁飛區影響的航向偏角修正值越大,偽航向偏角δψ越小,意圖代價iangle越大,如圖2所示。
64、優選的,所述step3中,針對不同維度的代價函數,傳統方法直接經過簡單的縮放將它們構造在一個函數中;在不同態勢下,距離和角度的量綱差異過大,縮放系數選擇的不恰當會直接導致某一維度的影響因素過重,進而淹沒了體現真實攻擊意圖的代價維度;因此,構建多維意圖融合模型來解決這一問題。構建多維意圖融合模型包括:
65、根據不同維度的意圖代價函數計算的似然概率為
66、
67、式中:n′為意圖總數,為意圖距離維的似然概率,為意圖角度維的似然概率;由貝葉斯推理模型可得不同意圖的后驗概率為
68、
69、式中:和pi,dis分別為意圖距離維的先驗概率和后驗概率,和pi,angle分別為意圖角度維的先驗概率和后驗概率;
70、對不同維度的后驗概率加權融合,
71、pi=λpi,dis+(1-λ)pi,angle????????(38)
72、式中:λ為距離維推斷結果的加權系數,pi為融合后的意圖后驗概率;
73、綜上所述,首先通過計算不同意圖在不同維度的后驗概率,避開了量綱不同造成的系數選擇困難的問題;然后針對不同維度的后驗概率進行加權融合,將代價系數的選擇問題轉化成了代價權重的選擇。
74、優選的,所述step4中,在預測階段,由于觀測信息缺失,依靠預測的氣動參數進行意圖識別的準確性和可靠性都較低;考慮到飛行器意圖在飛行過程中不會頻繁改變,因此綜合歷史跟蹤的個狀態濾波值計算攻擊要地的概率分布;根據多維意圖融合模型可得k時刻rgv可達區內攻擊要地的后驗概率
75、
76、根據歷史時刻的后驗概率,可得要地受到攻擊的概率
77、
78、式中:ωi為歷史時刻后驗概率的權重;權重ωi通過指數衰減法確定,計算公式如下
79、ω′i=e-λ(n-i+1)??????(41)
80、
81、式中:λ為衰減系數。
82、根據式(39)可推斷出最可能遭受攻擊的要地為
83、
84、在攻擊意圖為ηt時,根據多維意圖融合模型可得k時刻rgv的參數模型的后驗概率
85、p(μj|x1:k,ηt)=ε1pdis(μj|x1:k,ηt)+(1-ε1)pangle(μj|x1:k,ηt)??????(44)
86、最后,確定最大后驗概率的參數模型為
87、
88、與現有技術相比,本發明的有益效果是:
89、(1)本發明構建時變參數模型集,根據目標歷史運動規律和側向機動方向實時更新參數模型集,有效應對目標機動突變。
90、(2)本發明構建不同維度的意圖代價函數,綜合考慮攻擊要地、禁飛區和飛行器三者之間的距離和角度關系,構建了基于人工勢場法的距離維意圖代價函數和基于偽航向偏角和角度維意圖代價函數,為解決禁飛區存在情況下的飛行器意圖代價量化提供了新的解決思路。
91、(3)本發明創新性的提出構建多維意圖融合模型,通過在貝葉斯推理模型中融合不同維度的意圖代價,避免了傳統代價系數設置不合理帶來的推斷失效問題,提高了意圖代價函數的普適性。
92、上述概述僅僅是為了說明書的目的,并不意圖以任何方式進行限制。除上述描述的示意性的方面、實施方式和特征之外,通過參考附圖和以下的詳細描述,本發明進一步的方面、實施方式和特征將會是容易明白的。
- 還沒有人留言評論。精彩留言會獲得點贊!