基于PID與反轉Transformer的脫硝智能控制方法及系統與流程
本發明涉及脫硝控制,具體是一種基于pid與反轉transformer的脫硝智能控制方法及系統。
背景技術:
1、選擇性催化還原(scr,?selective?catalytic?reduction)脫硝技術是工業煙氣治理中降低氮氧化物(nox)排放的主流方案。其原理是在催化劑(如v2o5-wo3/tio2)作用下,向煙道內噴入氨(nh3)作為還原劑,將nox轉化為無害的n2和h2o。然而,實際運行中氨噴射量的精準控制面臨諸多問題,例如從氨噴射到nox濃度檢測需經歷混合、催化反應及傳感器響應等環節,總滯后時間達30-60秒,而傳統反饋控制因滯后效應易產生超調或振蕩。
2、傳統依賴誤差積分和微分反饋的pid控制器由于在滯后系統中易出現積分飽和和相位延遲,而長短期記憶網絡(lstm)和循環神經網絡(rnn)雖能捕捉時序依賴,但其梯度消失/爆炸問題導致超長序列(>60秒)預測誤差累積。另外雖然transformer架構的自注意力機制(self-attention)可建模全局依賴,但固定位置編碼難以適應scr系統動態時序偏移,且多頭注意力在長序列中易忽略局部關鍵特征(如突變工況的瞬態響應)。
技術實現思路
1、針對現有scr脫硝過程中氨噴射量難以精準調控的問題,本發明提供一種基于pid與反轉transformer的脫硝智能控制方法及系統,能夠更準確地預測未來一段時間內的nox濃度變化趨勢,從而提前調整氨的噴射量,從而有效克服了原有pid控制器的滯后缺陷。
2、為實現上述目的,本發明提供一種基于pid與反轉transformer的脫硝智能控制方法,包括如下步驟:
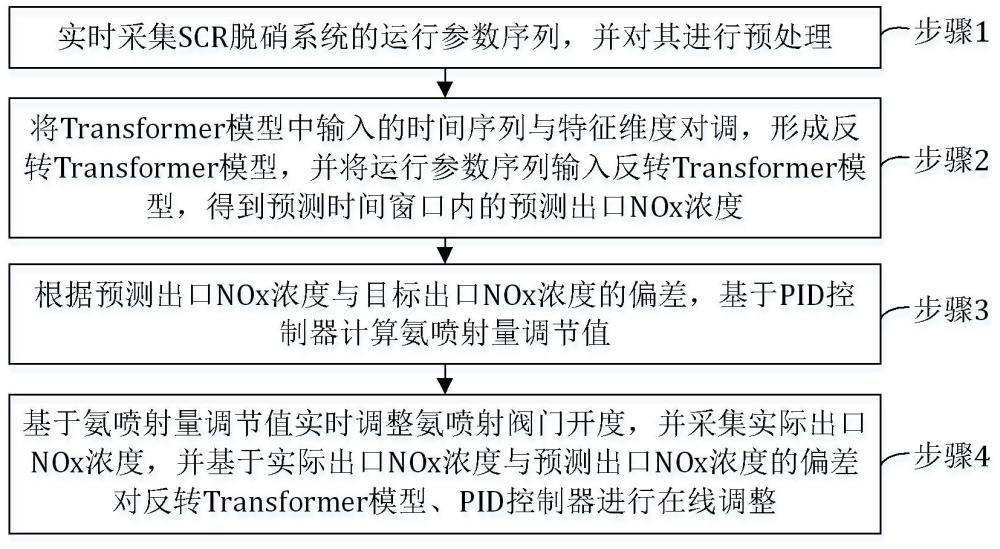
3、步驟1,實時采集scr脫硝系統的運行參數序列,并對其進行預處理;
4、步驟2,將transformer模型中輸入的時間序列與特征維度對調,形成反轉transformer模型,并將所述運行參數序列輸入所述反轉transformer模型,得到預測時間窗口內的預測出口nox濃度;
5、步驟3,基于所述預測出口nox濃度與目標出口nox濃度的偏差,基于pid控制器計算氨噴射量調節值;
6、步驟4,基于所述氨噴射量調節值實時調整氨噴射閥門開度,并采集實際出口nox濃度,并基于所述實際出口nox濃度與所述預測出口nox濃度的偏差對所述反轉transformer模型、所述pid控制器進行在線調整。
7、在其中一個實施例,所述運行參數序列具有多種特征數據序列,包括但不限于入口nox濃度、出口nox濃度、氨逃逸率、反應爐溫度、氨噴射閥門開度。
8、在其中一個實施例,步驟1中,所述預處理包括對每一所述特征數據序列進行操作:
9、首先,計算特征數據序列中特征數據的均值μ和標準差σ,并將特征數據序列中滿足的特征數據標記為異常點;
10、對特征數據序列中的異常點進行插值替換,并對插值后的特征數據序列進行歸一化處理,為:
11、;
12、其中,為特征數據歸一化處理后對應的特征數據。
13、在其中一個實施例,所述反轉transformer模型在訓練階段的損失函數為:
14、;
15、其中,為反轉transformer模型訓練過程中第輪迭代的權重系數;
16、表示huber損失,具體為:
17、;
18、;
19、其中,為反轉transformer模型一個訓練batch包含樣本數量,為batch中第個樣本對應的huber損失,為batch中第個樣本對應的出口nox濃度預測值,為batch中第個樣本對應的出口nox濃度真實值,為超參數;
20、表示mse損失,具體為:
21、;
22、;
23、其中,為batch中第個樣本對應的mse損失。
24、在其中一個實施例,所述權重系數具體為:
25、;
26、其中,、分別為初始權重、終值權重,且,為衰減系數,為訓練輪數。
27、在其中一個實施例,步驟3中,所述氨噴射量調節值具體為:
28、;
29、;
30、其中,為氨噴射量調節值,為當前時刻的偏差,為目標出口nox濃度,為改進transformer模型輸出的未來t秒的預測出口nox濃度,為從初始時刻到當前時刻的偏差累加,為采用間隔,、、分別為比例增益、積分增益與微分增益。
31、在其中一個實施例,步驟4中,所述基于所述氨噴射量調節值實時調整氨噴射閥門開度具體為:
32、若,則增大氨噴射閥門的開度,調節量為,其中,為閥門最大開度,為調節系數;
33、若,則減小氨噴射閥門的開度,調節量為;
34、若,則保持當前氨噴射閥門的開度不變。
35、在其中一個實施例,步驟4中,對所述反轉transformer模型、所述pid控制器進行在線調整具體包括:
36、步驟401,設定監控時間窗口,并計算每個所述監控時間窗口內實際出口nox濃度與預測出口nox濃度的平均絕對誤差;
37、步驟402,判斷是否連續n個監控時間窗口的平均絕對誤差超過設定閾值:
38、若是,進行步驟403;
39、否則,等待計算下一監控時間窗口的平均絕對誤差后再次進行步驟402;
40、步驟403,更新所述反轉transformer模型的學習率后,計算下一監控時間窗口的平均絕對誤差,并判斷其是否小于設定閾值:
41、若是,保存所述反轉transformer模型的學習率后,進行步驟404;
42、否則,再次進行步驟403;
43、步驟404,基于當前監控時間窗口的平均絕對誤差與上一監控時間窗口的平均絕對誤差動態調整所述pid控制器的比例增益與積分時間。
44、在其中一個實施例,步驟404具體為:
45、;
46、;
47、其中,、為調整后的比例增益與積分時間,、為調整前的比例增益與積分時間,為調整系數,為當前監控時間窗口的平均絕對誤差,為上一監控時間窗口的平均絕對誤差。
48、為實現上述目的,本發明還提供一種基于pid與反轉transformer的脫硝智能控制系統,采用上述的方法進行脫硝智能控制,所述脫硝智能控制系統包括:
49、數據采集單元,用于實時采集scr脫硝系統的運行參數序列,并對其進行預處理;
50、數據預測單元,用于將transformer模型中輸入的時間序列與特征維度對調,形成反轉transformer模型,并將所述運行參數序列輸入所述反轉transformer模型,得到預測時間窗口內的預測出口nox濃度;
51、pid計算單元,用于根據所述預測出口nox濃度與目標出口nox濃度的偏差,基于pid控制器計算氨噴射量調節值;
52、在線調整單元,用于根據所述氨噴射量調節值實時調整氨噴射閥門開度,并采集實際出口nox濃度,并基于所述實際出口nox濃度與所述預測出口nox濃度的偏差對所述反轉transformer模型、所述pid控制器進行在線調整。
53、與現有技術相比,本發明具有如下有益技術效果:
54、本發明通過將transformer模型中輸入的時間序列與特征維度對調,將自注意力機制從時間維度轉移到特征維度,從而更好地捕捉長序列中的特征信息,進而更準確地預測未來一段時間內的nox濃度變化趨勢,從而配合pid控制器提前調整氨的噴射量,從而有效克服了原有pid控制器的滯后缺陷。
- 還沒有人留言評論。精彩留言會獲得點贊!