一種膝關節撐開器壓力誤差補償方法
本發明涉及壓力測量,特別涉及一種膝關節撐開器壓力誤差補償方法。
背景技術:
1、在膝關節手術中,軟組織(如韌帶、肌腱等)的壓力測量對手術成功和術后康復至關重要,精準測量膝關節軟組織的壓力不僅有助于確保手術質量和恢復關節功能,還能有效避免過度壓力引發的術后并發癥,目前手術過程中通過膝關節撐開器底部電機的壓力傳感器測量膝關節軟組織壓力。
2、理論上,根據牛頓第三定律,膝關節撐開器底部電機的壓力傳感器測得的力應該與作用于外部執行機構上的力相等。然而,由于外部執行機構與電機之間有各種機械部件,當外部執行機構受到壓力時,膝關節撐開器會產生彎矩帶動內部的機械部件晃動,外部執行機構也可能會產生微小形變,此外,膝關節撐開器內部的機械部件(如法蘭、運動機構等)也會產生摩擦力,從而導致能量損失。基于以上原因,最終使得膝關節撐開器底部電機的壓力傳感器測得的力與外部執行機構施加的壓力不完全相等。通過上述分析可知,即使膝關節撐開器的機械裝置再精密,由于膝關節撐開器本身的結構問題,膝關節撐開器在手術中的測量誤差是不可避免的。因此,如果想通過膝關節撐開器底部的電機精確測量施加在外部執行機構上的壓力,需要通過誤差補償提升測量精度。
3、目前,傳統的誤差解決方法包括硬件改進和靜態誤差補償等。其中,靜態誤差補償措施包括基于已知的傳感器誤差特性,建立簡單的線性補償模型,對測量結果進行修正,如中國專利cn117442396a公開了一種膝關節撐開器的數據處理方法,解決了由于膝關節軟組織導致的測量誤差問題。
4、雖然這些方法能在一定程度上減少膝關節撐開器的測量誤差,但往往無法實時應對復雜手術環境的動態變化,導致測量精度和手術效果依然存在局限。
技術實現思路
1、為了解決上述技術問題,本發明提供一種膝關節撐開器壓力誤差補償方法,有效解決因膝關節撐開器結構影響導致的壓力測量誤差問題,從而提高測量結果的準確性和可靠性。
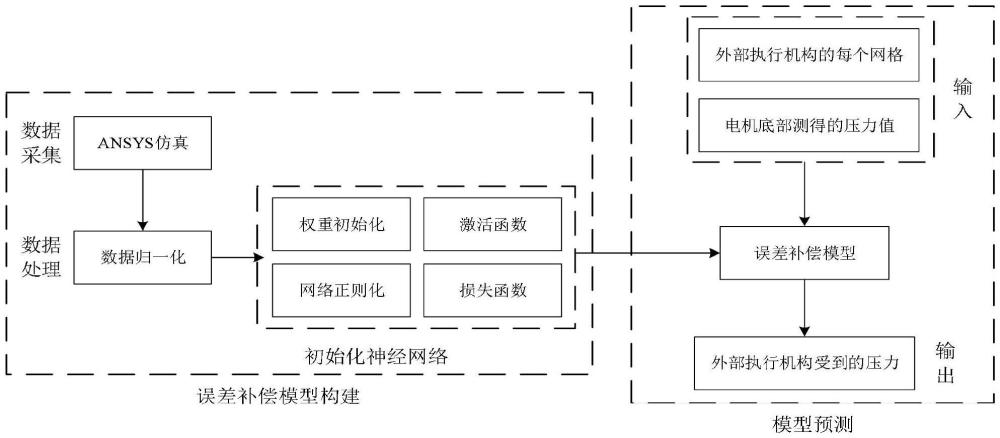
2、本發明提供一種膝關節撐開器壓力誤差補償方法,包括:誤差補償模型構建:通過有限元軟件ansys對膝關節撐開器進行動力學建模,對建立好的動力學模型進行測試仿真,得到多組電機底部的真實壓力值,同時獲取多組對應的膝關節撐開器電機底部壓力傳感器測得的壓力值即測量數據,將測量數據與真實壓力值作為訓練數據訓練bp神經網絡模型形成誤差補償模型;模型預測:在手術過程中,膝關節撐開器實時測量膝關節軟組織壓力數據,將測量得到的膝關節軟組織壓力數據輸入誤差補償模型,誤差補償模型根據此前的訓練結果,自動對膝關節軟組織壓力數據進行誤差補償,將該補償值與實時測量的膝關節軟組織壓力數據結合,輸出修正后的精確壓力值。
3、可選的,對動力學模型進行測試仿真具體包括:在動力學模型的每個網格即外部執行機構上,施加不同大小的力,力的范圍從0n至100n,每次施加的力間隔為0.1n,每種力值分別測試多次仿真,通過測試仿真,得到電機底部的真實壓力值。
4、可選的,誤差補償模型構建好后進行誤差補償驗證。
5、可選的,bp神經網絡模型誤差補償驗證包括:通過高精度壓力傳感器直接采集膝關節施加的壓力即實際壓力值,將與實際壓力值對應的測量數據輸入bp神經網絡模型,該模型通過捕捉膝關節軟組織的非線性特性以及測量誤差的模式,不斷優化模型的權重和參數,生成一個預測壓力值,將生成的預測壓力值與實際壓力值進行比對,驗證bp神經網絡模型的準確性。
6、可選的,將測量數據與真實壓力值作為訓練數據訓練bp神經網絡模型形成誤差補償模型前先將測量數據與真實壓力值分別進行歸一化處理,歸一化處理公式為:
7、
8、式中μi為待歸一化的數據,μmin為待歸一化數據中的最小值,μmax為待歸一化數據中的最大值,xi為歸一化后的結果。
9、可選的,構建bp神經網絡模型包括權重初始化,權重初始化的公式如下:
10、
11、其中w為連接權重,nin為前一層神經單元的個數,nout為后一層神經單元的個數,var(w)為權重的方差。
12、可選的,在bp神經網絡模型訓練過程中進行網絡正則化,網絡正則化采用dropout方法進行網絡正則化。
13、可選的,bp神經網絡模型采用線性整流函數作為激活函數。
14、可選的,bp神經網絡模型訓練過程中采用方差代價函數作為損失函數計算誤差,損失函數表達式如下:
15、
16、其中y是期待的輸出,a為神經元的實際輸出,c為函數值。
17、本發明實施例提供的技術方案與現有技術相比具有如下優點:
18、本發明實施例提供的一種膝關節撐開器壓力誤差補償方法通過引入基于bp神經網絡的誤差補償技術,解決了現有膝關節撐開器在手術過程中遇到的測量誤差問題,通過有限元軟件ansys數學建模精確模擬膝關節撐開器即外部執行機構的不同壓力行為獲取大量的電機底部的真實壓力值,再獲取對應的膝關節撐開器電機底部壓力傳感器測得的壓力值即測量數據,通過將大量的真實壓力值以及測量數據輸送給bp神經網絡模型進行訓練,而誤差補償模型的任務就是將測量壓力調整為真實的壓力值,通過建立bp神經網絡模型,能夠捕捉非線性關系,可以實時補償由于膝關節撐開器的結構引起的壓力測量不準的問題,確保在動態環境下獲得高精度的測量結果。通過神經網絡通過持續的自學習機制,可以適應設備的老化和手術中的使用磨損,確保膝關節撐開器長期使用后的測量精度,同時也大大減少了手術過程中依賴醫生經驗進行人工調節的需求,提高了手術效率和安全性。
技術特征:
1.一種膝關節撐開器壓力誤差補償方法,其特征在于,包括:
2.如權利要求1所述的膝關節撐開器壓力誤差補償方法,其特征在于,對所述動力學模型進行測試仿真具體包括:在動力學模型的每個網格即外部執行機構上,施加不同大小的力,力的范圍從0n至100n,每次施加的力間隔為0.1n,每種力值分別測試多次仿真,通過測試仿真,得到電機底部的真實壓力值。
3.如權利要求1所述的膝關節撐開器壓力誤差補償方法,其特征在于,所述誤差補償模型構建好后進行誤差補償驗證。
4.如權利要求3所述的膝關節撐開器壓力誤差補償方法,其特征在于,所述誤差補償驗證包括:通過高精度壓力傳感器直接采集膝關節施加的壓力即實際壓力值,將與實際壓力值對應的測量數據輸入誤差補償模型,該模型通過捕捉膝關節軟組織的非線性特性以及測量誤差的模式,不斷優化模型的權重和參數,生成一個預測壓力值,將生成的預測壓力值與實際壓力值進行比對,驗證誤差補償模型的準確性。
5.如權利要求1所述的膝關節撐開器壓力誤差補償方法,其特征在于,所述將測量數據與真實壓力值作為訓練數據訓練bp神經網絡模型形成誤差補償模型前先將測量數據與真實壓力值分別進行歸一化處理,歸一化處理公式為:
6.如權利要求1所述的膝關節撐開器壓力誤差補償方法,其特征在于,構建所述bp神經網絡模型包括權重初始化,所述權重初始化的公式如下:
7.如權利要求1所述的膝關節撐開器壓力誤差補償方法,其特征在于,在所述bp神經網絡模型訓練過程中進行網絡正則化,所述網絡正則化采用dropout方法進行網絡正則化。
8.如權利要求1所述的膝關節撐開器壓力誤差補償方法,其特征在于,所述bp神經網絡模型采用線性整流函數作為激活函數。
9.如權利要求1所述的膝關節撐開器壓力誤差補償方法,其特征在于,所述bp神經網絡模型訓練過程中采用方差代價函數作為損失函數計算誤差,所述損失函數表達式如下:
技術總結
本發明公開了一種膝關節撐開器壓力誤差補償方法,包括誤差補償模型構建:通過有限元軟件ANSYS對膝關節撐開器進行動力學建模,對建立好的動力學模型進行測試仿真,得到多組電機底部的真實壓力值,同時獲取多組對應的膝關節撐開器電機底部壓力傳感器測得的壓力值即測量數據,將上述數據作為訓練數據訓練BP神經網絡模型形成誤差補償模型,模型預測:膝關節撐開器實時測量膝關節軟組織壓力數據,將測量得到的膝關節軟組織壓力數據輸入誤差補償模型,誤差補償模型根據此前的訓練結果,對膝關節軟組織壓力數據進行誤差補償,將補償值與測量的膝關節軟組織壓力數據結合,得到精確壓力值,有效解決因膝關節撐開器結構影響導致的壓力測量誤差問題。
技術研發人員:張良,張恩奎,韓太林,高騰淵,楊雪松,鞠明池,劉軒,王英志,李金哲,朱存星,梁民澤
受保護的技術使用者:長春理工大學
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!