一種安裝在CBCT上的深度相機參數(shù)的標(biāo)定方法與流程
本發(fā)明涉及圖像處理,尤其涉及一種安裝在cbct上的深度相機參數(shù)的標(biāo)定方法。
背景技術(shù):
1、通過在c型臂等三維x光成像設(shè)備上加裝深度相機,可在三維x光圖像采集的過程中同步采集深度相機圖像,以此獲得患者及術(shù)區(qū)位置上方和兩側(cè)復(fù)雜表面信息,從而無感實現(xiàn)導(dǎo)航避障、手術(shù)輔助等功能。而為了實現(xiàn)上述功能,需要預(yù)先(出廠或者維護期間)對深度相機進(jìn)行配準(zhǔn)標(biāo)定,獲取掃描過程中相機運動的精確位姿信息,用于術(shù)區(qū)表面重建。
技術(shù)實現(xiàn)思路
1、發(fā)明目的:針對上述需求,本發(fā)明提出一種安裝在cbct上的深度相機參數(shù)的標(biāo)定方法,。
2、技術(shù)方案:
3、本發(fā)明提供一種安裝在cbct上的深度相機參數(shù)的標(biāo)定方法,其特征在于,包括:
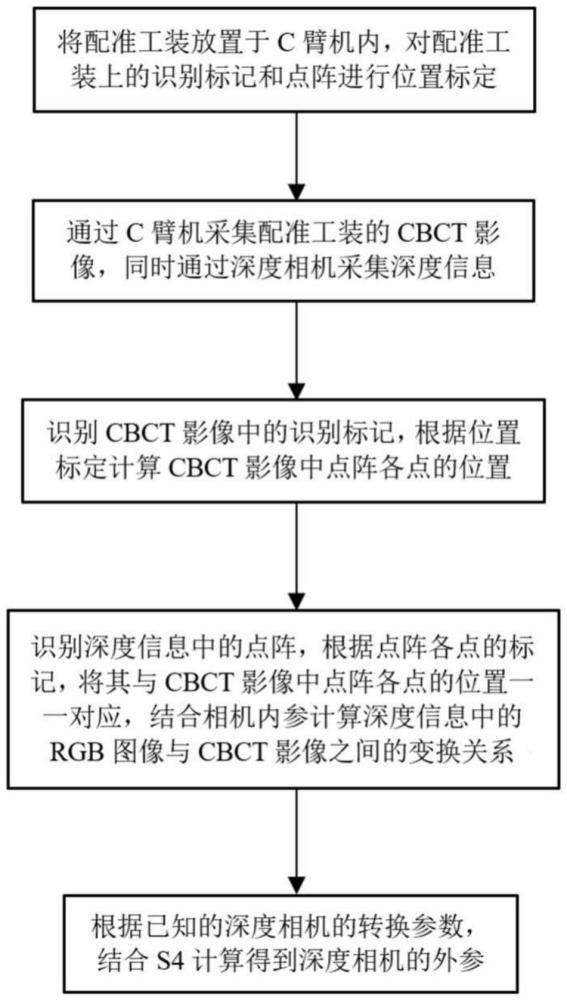
4、s1、將配準(zhǔn)工裝放置于c臂機內(nèi),對配準(zhǔn)工裝上的識別標(biāo)記和點陣進(jìn)行位置標(biāo)定;
5、s2、通過c臂機采集配準(zhǔn)工裝的cbct影像,同時通過安裝于c臂機上的深度相機采集其深度信息;
6、s3、識別cbct影像中的識別標(biāo)記,根據(jù)s1的位置標(biāo)定計算得到cbct影像中點陣各點的位置;
7、s4、識別s2得到的深度信息中的rgb圖像中的點陣,根據(jù)點陣各點的標(biāo)記,將其與s3得到的cbct影像中點陣各點的位置一一對應(yīng),從而結(jié)合相機內(nèi)參計算深度信息中的rgb圖像與cbct影像之間的變換關(guān)系;
8、s5、根據(jù)已知的深度相機的轉(zhuǎn)換參數(shù),結(jié)合s4計算深度信息中的深度圖像和cbct影像之間的轉(zhuǎn)換矩陣,也即得到深度相機的外參。
9、具體地,所述點陣設(shè)置在配準(zhǔn)工裝的外表面上,所述識別標(biāo)記設(shè)置在所述配準(zhǔn)工裝的任意位置處。
10、更具體地,所述配準(zhǔn)工裝的外表面設(shè)置為弧形柱面,且弧形柱面與c形臂同心且曲率一致;
11、配準(zhǔn)工裝放置于c臂機內(nèi)時,其軸線垂直于c形臂所在平面。
12、更進(jìn)一步地,所述配準(zhǔn)工裝可設(shè)計為內(nèi)外套筒結(jié)構(gòu),所述識別標(biāo)記設(shè)置在所述配準(zhǔn)工裝的內(nèi)套筒上,所述點陣設(shè)置在外套筒的外表面上,所述外套筒套設(shè)于所述內(nèi)套筒外。
13、具體地,所述點陣由棋盤格的角點構(gòu)成,在所述棋盤格的各白格中分別添加不同的定位標(biāo)記,并分別對棋盤格各角點添加識別標(biāo)簽。
14、更具體地,所述s4中,所述識別s2得到的深度信息中的rgb圖像中的點陣,根據(jù)點陣各點的標(biāo)記,將其與s3得到的cbct影像中點陣各點的位置一一對應(yīng),具體如下:
15、(1)對rgb圖像序列的各圖像進(jìn)行二值化處理,得到二值圖像;
16、(2)識別步驟(1)得到的二值圖像中掩碼作為定位標(biāo)記,框定各棋盤格角點的設(shè)定范圍和各棋盤格的角點的識別標(biāo)簽;
17、(3)據(jù)步驟(2)框定的棋盤格角點的設(shè)定范圍,計算其內(nèi)梯度,得到其邊緣,對各邊緣像素進(jìn)行十字線擬合,計算擬合十字線的交點,識別得到棋盤格的角點,即得到棋盤格角點的坐標(biāo);
18、(4)通過步驟(2)得到的各棋盤格的角點的識別標(biāo)簽和步驟(3)得到的棋盤格角點的坐標(biāo),將其與s3中的cbct影像中各棋盤格角點的位置一一對應(yīng)。
19、具體地,所述s4中,所述計算深度信息中的rgb圖像與cbct影像之間的變換關(guān)系采用重投影優(yōu)化方法。
20、更具體地,所述重投影優(yōu)化方法采用g2o非線性優(yōu)化模型。
21、具體地,所述s3中,所述識別cbct影像中的識別標(biāo)記采用閾值提取方法。
22、具體地,所述s3中,根據(jù)s1的位置標(biāo)定計算得到cbct影像中點陣各點的位置,具體如下:
23、所述cbct影像中點陣各點的位置,即所述點陣與所述cbct影像之間的變換關(guān)系,包括旋轉(zhuǎn)矩陣rcp-ci和平移矩陣tcp-ci,則針對識別標(biāo)記中的某一體素,如下:
24、pci-sp=rcp-cipcp-sp+tcp-ci;
25、其中,pci-sp為識別得到cbct影像中的識別標(biāo)記的位置;pcp-sp為實際的識別標(biāo)記的位置,即相對于點陣的識別標(biāo)記的位置,根據(jù)s1的位置標(biāo)定計算得到;
26、采用svd分別方法求得旋轉(zhuǎn)矩陣rcp-ci和平移矩陣tcp-ci,包括:
27、s31、分別計算cbct影像中的識別標(biāo)記所有體素的質(zhì)心和實際的識別標(biāo)記所有體素的質(zhì)心;
28、s33、定義矩陣w=p*qt/n,其中,p、q分別表示去質(zhì)心化后的cbct影像中的識別標(biāo)記和實際的識別標(biāo)記,對其進(jìn)行svd奇異矩陣分解得到w=u∑vt,由此得到旋轉(zhuǎn)矩陣rcp-ci=uvt和平移矩陣tcp-ci=p-rcp-ci*q,即得到所述點陣與所述cbct影像之間的變換關(guān)系。
29、有益效果:本發(fā)明通過棋盤格上設(shè)置的定位標(biāo)記實現(xiàn)在cbct影像和深度相機之間的對應(yīng),進(jìn)而可以結(jié)合相機內(nèi)參計算得到深度相機采集的rgb圖像與cbct影像之間的變換關(guān)系,之后根據(jù)深度相機的轉(zhuǎn)換參數(shù)結(jié)合深度圖像,可以計算深度相機的外參,從而完成安裝在cbct上的深度相機參數(shù)的標(biāo)定,進(jìn)而可以實現(xiàn)后續(xù)的術(shù)區(qū)表面重建。通過此方法可以實現(xiàn)動態(tài)連續(xù)標(biāo)定,確定深度相機乃至整個c臂的運動軌跡;工裝上包括多種定位標(biāo)志,可被多種影像設(shè)備分別觀測,通過本方法將所有關(guān)測結(jié)果關(guān)聯(lián)起來形成一個有機整體。標(biāo)定結(jié)果用于術(shù)區(qū)表面重建視野大,可以與視野較小cbct圖像結(jié)合起來,豐富患者術(shù)區(qū)的感知能力,協(xié)同導(dǎo)航設(shè)備實現(xiàn)防碰撞等需求功能。本發(fā)明操作簡單便捷,深度相機參數(shù)的標(biāo)定明確簡潔。
技術(shù)特征:
1.一種安裝在cbct上的深度相機參數(shù)的標(biāo)定方法,其特征在于,包括:
2.根據(jù)權(quán)利要求1所述的安裝在cbct上的深度相機參數(shù)的標(biāo)定方法,其特征在于,所述點陣設(shè)置在配準(zhǔn)工裝的外表面上,所述識別標(biāo)記設(shè)置在所述配準(zhǔn)工裝的任意位置處。
3.根據(jù)權(quán)利要求2所述的安裝在cbct上的深度相機參數(shù)的標(biāo)定方法,其特征在于,所述配準(zhǔn)工裝的外表面設(shè)置為弧形柱面,且弧形柱面與c形臂同心且曲率一致;
4.根據(jù)權(quán)利要求3所述的安裝在cbct上的深度相機參數(shù)的標(biāo)定方法,其特征在于,所述配準(zhǔn)工裝可設(shè)計為內(nèi)外套筒結(jié)構(gòu),所述識別標(biāo)記設(shè)置在所述配準(zhǔn)工裝的內(nèi)套筒上,所述點陣設(shè)置在外套筒的外表面上,所述外套筒套設(shè)于所述內(nèi)套筒外。
5.根據(jù)權(quán)利要求1所述的安裝在cbct上的深度相機參數(shù)的標(biāo)定方法,其特征在于,所述點陣由棋盤格的角點構(gòu)成,在所述棋盤格的各白格中分別添加不同的定位標(biāo)記,并分別對棋盤格各角點添加識別標(biāo)簽。
6.根據(jù)權(quán)利要求5所述的安裝在cbct上的深度相機參數(shù)的標(biāo)定方法,其特征在于,所述s4中,所述識別s2得到的深度信息中的rgb圖像中的點陣,根據(jù)點陣各點的標(biāo)記,將其與s3得到的cbct影像中點陣各點的位置一一對應(yīng),具體如下:
7.根據(jù)權(quán)利要求1所述的安裝在cbct上的深度相機參數(shù)的標(biāo)定方法,其特征在于,所述s4中,所述計算深度信息中的rgb圖像與cbct影像之間的變換關(guān)系采用重投影優(yōu)化方法。
8.根據(jù)權(quán)利要求7所述的安裝在cbct上的深度相機參數(shù)的標(biāo)定方法,其特征在于,所述重投影優(yōu)化方法采用g2o非線性優(yōu)化模型。
9.根據(jù)權(quán)利要求1所述的安裝在cbct上的深度相機參數(shù)的標(biāo)定方法,其特征在于,所述s3中,所述識別cbct影像中的識別標(biāo)記采用閾值提取方法。
10.根據(jù)權(quán)利要求1所述的安裝在cbct上的深度相機參數(shù)的標(biāo)定方法,其特征在于,所述s3中,根據(jù)s1的位置標(biāo)定計算得到cbct影像中點陣各點的位置,具體如下:
技術(shù)總結(jié)
本發(fā)明公開了一種安裝在CBCT上的深度相機參數(shù)的標(biāo)定方法,包括:S1、將配準(zhǔn)工裝放置于C臂機內(nèi),對配準(zhǔn)工裝上的識別標(biāo)記和點陣進(jìn)行位置標(biāo)定;S2、通過C臂機采集配準(zhǔn)工裝的CBCT影像,同時通過安裝于C臂機的平板探測器端面上的深度相機采集深度信息;S3、識別CBCT影像中的識別標(biāo)記,根據(jù)S1的位置標(biāo)定計算得到CBCT影像中點陣各點的位置;S4、識別深度信息中的RGB圖像中的點陣,根據(jù)點陣各點的標(biāo)記,將其與CBCT影像中點陣各點的位置一一對應(yīng),從而結(jié)合相機內(nèi)參計算深度信息中的RGB圖像與CBCT影像之間的變換關(guān)系;S5、根據(jù)已知的深度相機的轉(zhuǎn)換參數(shù),結(jié)合S4計算得到深度相機的外參。本發(fā)明操作簡單便捷,深度相機參數(shù)的標(biāo)定明確簡潔。
技術(shù)研發(fā)人員:王鋒,楊雨暉,趙偉
受保護的技術(shù)使用者:佗道醫(yī)療科技有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!