基于圖神經(jīng)網(wǎng)絡(luò)的分段軌跡匹配方法、裝置、設(shè)備及介質(zhì)與流程
本發(fā)明涉及數(shù)據(jù)處理,尤其涉及一種基于圖神經(jīng)網(wǎng)絡(luò)的分段軌跡匹配方法、裝置、計算機設(shè)備及存儲介質(zhì)。
背景技術(shù):
1、隨著基于位置的服務(wù)技術(shù)的不斷發(fā)展,市場業(yè)務(wù)對還原車輛實際行駛位置的需求不斷提高,從而路網(wǎng)匹配技術(shù)的存在至關(guān)重要。所謂路網(wǎng)匹配,即結(jié)合路網(wǎng)數(shù)據(jù),將車輛實際采集到的原始軌跡點準確地映射到路網(wǎng)數(shù)據(jù)上,以真實還原車輛行駛的位置信息。然而在實際應(yīng)用中,受硬件設(shè)備定位精度以及復(fù)雜場景(如建筑物遮擋、高架橋、隧道)等因素的影響,全球定位系統(tǒng)(global?positioning?system,gps)/全球?qū)Ш叫l(wèi)星系統(tǒng)(globalnavigation?satellite?system,gnss)的定位信號大概率會被干擾,從而導(dǎo)致定位不準,同時實際道路情況越來越復(fù)雜,這都使得實際采集到的軌跡數(shù)據(jù)與地圖道路數(shù)據(jù)存在嚴重偏差,導(dǎo)致存在較大距離漂移。
2、當前,通常基于隱馬爾可夫模型進行路網(wǎng)匹配,其通過考慮其位置、方向和路網(wǎng)拓撲關(guān)系計算各候選匹配點的概率,并選取概率最大者作為最終匹配結(jié)果。該方法可兼容大多數(shù)場景,但由于其狀態(tài)信息僅考慮前一軌跡點,模型的感受野有限,無法兼容定位系統(tǒng)的較大距離的漂移(即方向正確但位置等距漂移、位置和方向均漂移等),則在平行道路(如主輔路、小角度分岔路)等相似路形場景下容易匹配錯誤。
技術(shù)實現(xiàn)思路
1、基于此,有必要針對上述技術(shù)問題,提供一種基于圖神經(jīng)網(wǎng)絡(luò)的分段軌跡匹配方法、裝置、計算機設(shè)備及存儲介質(zhì),以解決上述現(xiàn)有技術(shù)中存在的至少一個問題。
2、第一方面,提供了一種基于圖神經(jīng)網(wǎng)絡(luò)的分段軌跡匹配方法,包括:
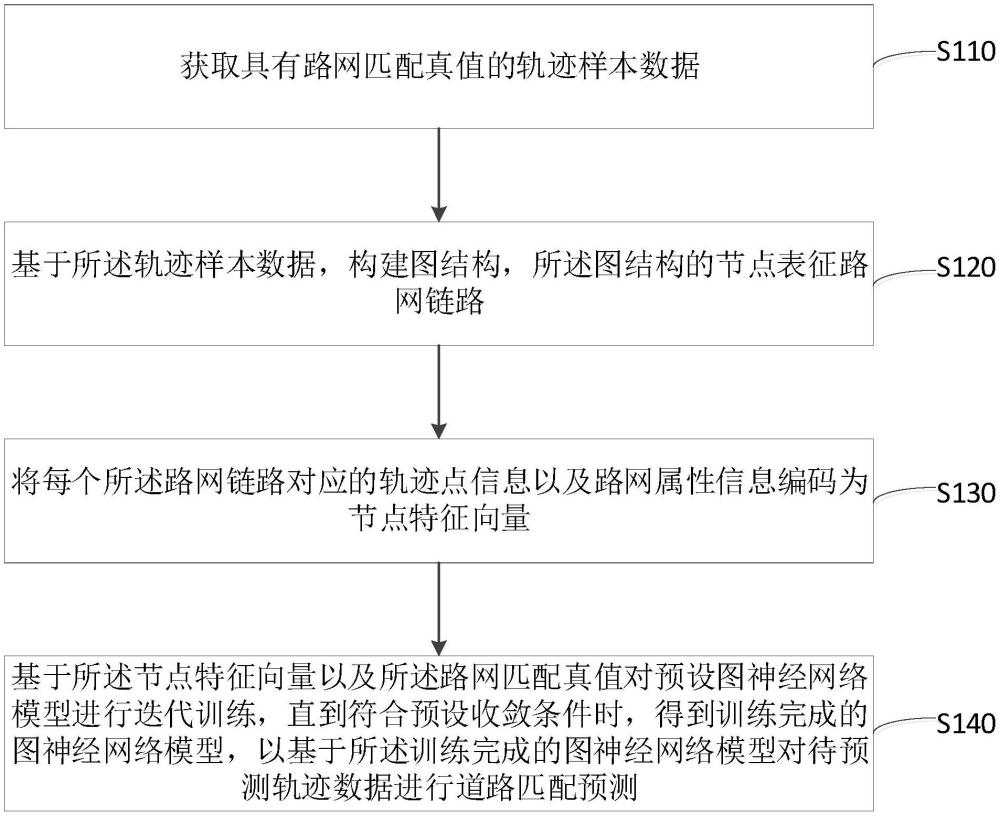
3、獲取具有路網(wǎng)匹配真值的軌跡樣本數(shù)據(jù);
4、基于所述軌跡樣本數(shù)據(jù),構(gòu)建圖結(jié)構(gòu),所述圖結(jié)構(gòu)的節(jié)點表征路網(wǎng)鏈路;
5、將每個所述路網(wǎng)鏈路對應(yīng)的軌跡點信息以及路網(wǎng)屬性信息編碼為節(jié)點特征向量;
6、基于所述節(jié)點特征向量以及所述路網(wǎng)匹配真值對預(yù)設(shè)圖神經(jīng)網(wǎng)絡(luò)模型進行迭代訓(xùn)練,直到符合預(yù)設(shè)收斂條件時,得到訓(xùn)練完成的圖神經(jīng)網(wǎng)絡(luò)模型,以基于所述訓(xùn)練完成的圖神經(jīng)網(wǎng)絡(luò)模型對待預(yù)測軌跡數(shù)據(jù)進行道路匹配預(yù)測。
7、在一實施例中,所述獲取具有路網(wǎng)匹配真值的軌跡樣本數(shù)據(jù),包括:
8、采集軌跡點信息以及路網(wǎng)數(shù)據(jù);
9、將所述軌跡點信息以及所述路網(wǎng)數(shù)據(jù)進行路網(wǎng)匹配,得到路網(wǎng)匹配結(jié)果;
10、對所述路網(wǎng)匹配結(jié)果進行人工糾錯標注,得到所述具有路網(wǎng)匹配真值的軌跡樣本數(shù)據(jù)。
11、在一實施例中,所述所述獲取具有路網(wǎng)匹配真值的軌跡樣本數(shù)據(jù),包括:
12、基于目標起點以及目標終點進行路線規(guī)劃,得到路段集合,所述路段集合包括從所述目標起點到目標終點之間所有行駛路段;
13、提取每個所述行駛路段對應(yīng)的路形經(jīng)緯度點集;
14、對所述路形經(jīng)緯度點集進行插值處理,并添加噪聲模擬,得到所述具有路網(wǎng)匹配真值的軌跡樣本數(shù)據(jù)。
15、在一實施例中,所述添加噪聲模擬,得到具有路網(wǎng)匹配真值的軌跡樣本數(shù)據(jù),包括:
16、通過所述軌跡樣本數(shù)據(jù),求解估計出噪聲分布的高斯混合分布模型參數(shù);
17、基于所述高斯混合分布模型參數(shù)對進行插值處理后的路形經(jīng)緯度點集中的各個路形經(jīng)緯度點添加對應(yīng)噪聲,以模擬受到噪聲影響后的所述具有路網(wǎng)匹配真值的軌跡樣本數(shù)據(jù)。
18、在一實施例中,所述將每個所述路網(wǎng)鏈路對應(yīng)的軌跡點信息以及路網(wǎng)屬性信息編碼為節(jié)點特征向量,包括:
19、對每個所述路網(wǎng)鏈路對應(yīng)的路網(wǎng)屬性信息進行對應(yīng)編碼,得到預(yù)設(shè)維度靜態(tài)特征;
20、基于每個路網(wǎng)鏈路周圍的軌跡點以及每個軌跡點對應(yīng)的多維特征,得到動態(tài)特征矩陣;
21、基于所述預(yù)設(shè)維度靜態(tài)特征以及所述動態(tài)特征矩陣,得到所述節(jié)點特征向量。
22、在一實施例中,所述基于所述預(yù)設(shè)維度靜態(tài)特征以及所述動態(tài)特征矩陣,得到所述節(jié)點特征向量,包括:
23、通過預(yù)設(shè)激活函數(shù)以及多層線性變換,得到注意力矩陣;
24、基于所述注意力矩陣以及動態(tài)特征矩陣,得到中間結(jié)果矩陣;
25、對所述中間結(jié)果矩陣以及所述預(yù)設(shè)維度靜態(tài)特征進行拼接,得到所述節(jié)點特征向量。
26、在一實施例中,所述基于所述訓(xùn)練完成的圖神經(jīng)網(wǎng)絡(luò)模型對待預(yù)測軌跡數(shù)據(jù)進行道路匹配預(yù)測,包括:
27、獲取待預(yù)測軌跡數(shù)據(jù),按照預(yù)設(shè)窗口大小對所述待預(yù)測軌跡數(shù)據(jù)進行切分;
28、基于切分后的每個窗口內(nèi)的軌跡數(shù)據(jù),召回預(yù)設(shè)范圍內(nèi)的路網(wǎng)數(shù)據(jù);
29、對切分后的每個窗口內(nèi)的軌跡數(shù)據(jù)以及預(yù)設(shè)范圍內(nèi)的路網(wǎng)數(shù)據(jù),進行特征提取,得到待預(yù)測特征;
30、基于訓(xùn)練完成的圖神經(jīng)網(wǎng)絡(luò)模型,對所述待預(yù)測特征進行預(yù)測,得到與所述待預(yù)測軌跡數(shù)據(jù)匹配的路線。
31、第二方面,提供了一種基于圖神經(jīng)網(wǎng)絡(luò)的分段軌跡匹配裝置,包括:
32、軌跡樣本數(shù)據(jù)獲取單元,用于獲取具有路網(wǎng)匹配真值的軌跡樣本數(shù)據(jù);
33、圖結(jié)構(gòu)構(gòu)建單元,用于基于所述軌跡樣本數(shù)據(jù),構(gòu)建圖結(jié)構(gòu),所述圖結(jié)構(gòu)的節(jié)點表征路網(wǎng)鏈路;
34、節(jié)點特征向量編碼單元,用于將每個所述路網(wǎng)鏈路對應(yīng)的軌跡點信息以及路網(wǎng)屬性信息編碼為節(jié)點特征向量;
35、預(yù)測單元,用于基于所述節(jié)點特征向量以及所述路網(wǎng)匹配真值對預(yù)設(shè)圖神經(jīng)網(wǎng)絡(luò)模型進行迭代訓(xùn)練,直到符合預(yù)設(shè)收斂條件時,得到訓(xùn)練完成的圖神經(jīng)網(wǎng)絡(luò)模型,以基于所述訓(xùn)練完成的圖神經(jīng)網(wǎng)絡(luò)模型對待預(yù)測軌跡數(shù)據(jù)進行道路匹配預(yù)測。
36、第三方面,提供了一種計算機設(shè)備,包括存儲器、處理器及存儲在所述存儲器上并在所述處理器上運行的計算機可讀指令,所述處理器執(zhí)行所述計算機可讀指令時實現(xiàn)如上述所述基于圖神經(jīng)網(wǎng)絡(luò)的分段軌跡匹配方法。
37、第四方面,提供了一種可讀存儲介質(zhì),其上存儲有計算機可讀指令,所述計算機可讀指令被處理器執(zhí)行時實現(xiàn)如上述所述基于圖神經(jīng)網(wǎng)絡(luò)的分段軌跡匹配方法。
38、上述基于圖神經(jīng)網(wǎng)絡(luò)的分段軌跡匹配方法、裝置、計算機設(shè)備及存儲介質(zhì),其方法實現(xiàn),包括:獲取具有路網(wǎng)匹配真值的軌跡樣本數(shù)據(jù);基于所述軌跡樣本數(shù)據(jù),構(gòu)建圖結(jié)構(gòu),所述圖結(jié)構(gòu)的節(jié)點表征路網(wǎng)鏈路;將每個所述路網(wǎng)鏈路對應(yīng)的軌跡點信息以及路網(wǎng)屬性信息編碼為節(jié)點特征向量;基于所述節(jié)點特征向量以及所述路網(wǎng)匹配真值對預(yù)設(shè)圖神經(jīng)網(wǎng)絡(luò)模型進行迭代訓(xùn)練,直到符合預(yù)設(shè)收斂條件時,得到訓(xùn)練完成的圖神經(jīng)網(wǎng)絡(luò)模型,以基于所述訓(xùn)練完成的圖神經(jīng)網(wǎng)絡(luò)模型對待預(yù)測軌跡數(shù)據(jù)進行道路匹配預(yù)測。在本技術(shù)實施例中,通過圖神經(jīng)網(wǎng)絡(luò)的節(jié)點分類任務(wù)實現(xiàn)路網(wǎng)匹配,路網(wǎng)鏈路是主要的信息載體,將路網(wǎng)鏈路轉(zhuǎn)化為圖數(shù)據(jù)結(jié)構(gòu)中的節(jié)點(node),實現(xiàn)對軌跡分段處理,且路網(wǎng)鏈路間的連接關(guān)系轉(zhuǎn)化為圖數(shù)據(jù)結(jié)構(gòu)中的邊信息(edges)。同時把鏈路屬性信息及軌跡點信息編碼為節(jié)點特征信息,可更好地應(yīng)用路網(wǎng)的拓撲關(guān)系以及學(xué)習(xí)軌跡點信息對于路網(wǎng)鏈路數(shù)據(jù)的偏差與漂移場景中的參數(shù)表征,可解決隱馬爾可夫模型由于感受野有限,無法兼容定位系統(tǒng)的較大距離的漂移、在平行道路(如主輔路、小角度分岔路)等相似路形場景下容易匹配錯誤的問題,從而提高路網(wǎng)匹配準確率。
- 還沒有人留言評論。精彩留言會獲得點贊!