一種基于成像輔助數(shù)據(jù)的空間目標(biāo)異動(dòng)判別方法
本發(fā)明涉及太空態(tài)勢(shì)感知和空間目標(biāo)識(shí)別,具體是一種基于成像輔助數(shù)據(jù)的空間目標(biāo)異動(dòng)判別方法。
背景技術(shù):
1、隨著空間技術(shù)的飛速發(fā)展,人類(lèi)活動(dòng)的領(lǐng)域已經(jīng)從傳統(tǒng)的陸、海、空,向空間拓展,且空間由于其特殊的位置優(yōu)勢(shì),已經(jīng)成為地球上通信、經(jīng)濟(jì)、軍事戰(zhàn)略和國(guó)際關(guān)系的核心。現(xiàn)在,它是人類(lèi)探索、開(kāi)發(fā)以及可能征服的最新舞臺(tái)。隨著人類(lèi)在太空領(lǐng)域活動(dòng)的不斷增多,以及對(duì)空間資源的持續(xù)開(kāi)發(fā)利用,空間目標(biāo)的數(shù)量正在呈指數(shù)級(jí)增長(zhǎng)。
2、低軌方面,隨著一系列巨型星座的建設(shè)部署,將嚴(yán)重?cái)D壓太空空間,如此數(shù)量龐大和密集分布的衛(wèi)星將給航天器的發(fā)射入軌、正常運(yùn)行和離軌處置帶來(lái)巨大的碰撞風(fēng)險(xiǎn)。星鏈衛(wèi)星在發(fā)射入軌的初期,將在小推力作用下進(jìn)行持續(xù)近1個(gè)月的軌道抬升,并在啟動(dòng)推力和停止推力的前后還會(huì)出現(xiàn)推力值跳變的現(xiàn)象,同時(shí)為了規(guī)避星座內(nèi)部的碰撞風(fēng)險(xiǎn),星鏈衛(wèi)星上加裝了自主避撞系統(tǒng),其能夠接收美國(guó)國(guó)防部的太空目標(biāo)編目數(shù)據(jù),在需要時(shí)進(jìn)行軌道機(jī)動(dòng)。星鏈衛(wèi)星為了避撞會(huì)經(jīng)常進(jìn)行很多小規(guī)模的軌道修正和調(diào)整,但太空探索公司并不完全發(fā)布星鏈衛(wèi)星進(jìn)行軌道機(jī)動(dòng)的情況,會(huì)使其他航天器的運(yùn)行風(fēng)險(xiǎn)成倍增加。高軌方面,隨著衛(wèi)星平臺(tái)由大型一體化向小型分散化發(fā)展,高軌衛(wèi)星更加頻繁的進(jìn)行軌道機(jī)動(dòng)以開(kāi)展衛(wèi)星延壽、空間試驗(yàn)等任務(wù)。
3、當(dāng)前,各國(guó)航天器在軌機(jī)動(dòng)頻繁,尤其是國(guó)內(nèi)外航天器之間存在碰撞預(yù)警事件時(shí),雙方往往沒(méi)有溝通,均為“背對(duì)背”的處置進(jìn)行機(jī)動(dòng),存在因機(jī)動(dòng)而產(chǎn)生碰撞的風(fēng)險(xiǎn)。對(duì)這些軌道異動(dòng)空間目標(biāo)的觀測(cè)、監(jiān)視與識(shí)別一直是研究的重點(diǎn)方向,及時(shí)發(fā)現(xiàn)并判別該類(lèi)目標(biāo)的軌道異動(dòng)行為,可有效支撐空間碰撞預(yù)警。我國(guó)在軌航天器搭載的小口徑望遠(yuǎn)鏡可長(zhǎng)時(shí)間對(duì)目標(biāo)進(jìn)行跟蹤,獲得大量觀測(cè)數(shù)據(jù),但受裝備能力影響,這類(lèi)小口徑望遠(yuǎn)鏡的探測(cè)能力不足,導(dǎo)致視場(chǎng)內(nèi)恒星數(shù)量有限,在目標(biāo)跟蹤過(guò)程中往往無(wú)法完成天文定位測(cè)量,同時(shí)該類(lèi)望遠(yuǎn)鏡測(cè)角精度較差,難以準(zhǔn)確定位,因此往往無(wú)法使用傳統(tǒng)異動(dòng)檢測(cè)方法進(jìn)行異動(dòng)判別,數(shù)據(jù)難以充分利用,因此,亟需一種有效的空間目標(biāo)異動(dòng)判別方法。
4、針對(duì)空間目標(biāo)的異動(dòng)檢測(cè),傳統(tǒng)異動(dòng)檢測(cè)的原理是:將目標(biāo)預(yù)期在相機(jī)坐標(biāo)系中的角位置與實(shí)際角位置作比較,當(dāng)超過(guò)一定檢測(cè)閾值后認(rèn)為發(fā)生異動(dòng)。根據(jù)目標(biāo)的預(yù)報(bào)位置以及監(jiān)測(cè)衛(wèi)星/相機(jī)的坐標(biāo)系信息,可以計(jì)算時(shí)目標(biāo)相對(duì)于相機(jī)是否可見(jiàn),以及如果可見(jiàn)的情況下目標(biāo)在相機(jī)坐標(biāo)系中的位置。目標(biāo)的實(shí)際相平面位置與預(yù)報(bào)相平面位置,以角度計(jì)之差記為,機(jī)動(dòng)后目標(biāo)是否出現(xiàn)在相機(jī)視場(chǎng)內(nèi),在假設(shè)目標(biāo)可見(jiàn)的情況下,與視場(chǎng)大小、預(yù)報(bào)位置與實(shí)際位置之差的大小,以及預(yù)報(bào)位置的方向有關(guān)。如果預(yù)報(bào)位置在視場(chǎng)邊緣,當(dāng)小于視場(chǎng)角時(shí)且位置差方向理想,則機(jī)動(dòng)后目標(biāo)將出現(xiàn)在視場(chǎng)內(nèi);如果預(yù)報(bào)位置在視場(chǎng)中心,當(dāng)小于視場(chǎng)角時(shí),則機(jī)動(dòng)后目標(biāo)將出現(xiàn)在視場(chǎng)內(nèi)。
5、傳統(tǒng)異動(dòng)檢測(cè)采用基于特征量的方法,即實(shí)測(cè)值與理論預(yù)報(bào)值按照如下公式,轉(zhuǎn)換計(jì)算得到特征量,超過(guò)設(shè)定異動(dòng)閾值即判為異動(dòng),因此,傳統(tǒng)異動(dòng)檢測(cè)識(shí)別的主要影響要素包含特征量觀測(cè)誤差、特征量理論計(jì)算誤差,具體而言就是利用反應(yīng)特征量的天文定位實(shí)測(cè)值和天文定位理論值來(lái)計(jì)算誤差。
6、
7、其中,表示天文定位赤經(jīng)的實(shí)測(cè)值,表示天文定位赤經(jīng)的理論值,表示天文定位赤緯的實(shí)測(cè)值,表示天文定位赤緯的理論值。
8、雖然該方法具有測(cè)量精度高的優(yōu)點(diǎn),但是其缺點(diǎn)是方法復(fù)雜且時(shí)效性差,需要首先完成天文定位,要求測(cè)角精度高,對(duì)成像類(lèi)裝備不適應(yīng)。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的目的是為了克服現(xiàn)有技術(shù)存在的缺陷和不足,提供一種基于成像輔助數(shù)據(jù)的空間目標(biāo)異動(dòng)判別方法。
2、為實(shí)現(xiàn)上述目的,本發(fā)明提供如下技術(shù)方案:
3、一種基于成像輔助數(shù)據(jù)的空間目標(biāo)異動(dòng)判別方法,其特征在于:具體包括以下步驟:
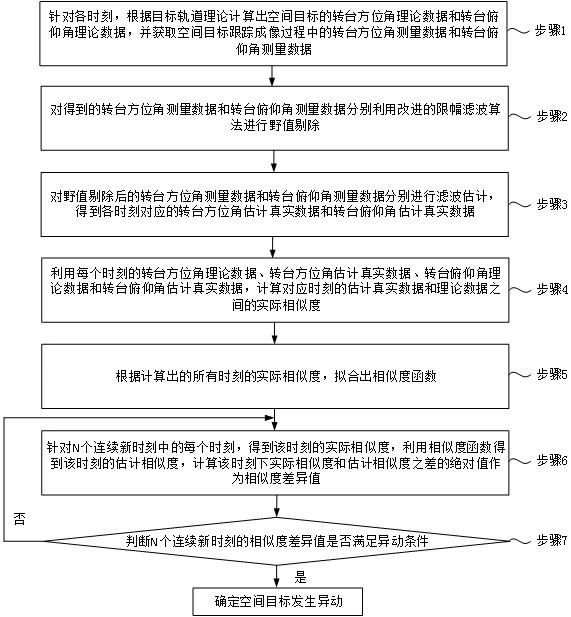
4、s1.針對(duì)各時(shí)刻,根據(jù)目標(biāo)軌道計(jì)算出空間目標(biāo)的轉(zhuǎn)臺(tái)方位角理論數(shù)據(jù)和轉(zhuǎn)臺(tái)俯仰角理論數(shù)據(jù),并獲取空間目標(biāo)在跟蹤成像過(guò)程中的轉(zhuǎn)臺(tái)方位角測(cè)量數(shù)據(jù)和轉(zhuǎn)臺(tái)俯仰角測(cè)量數(shù)據(jù);
5、s2.對(duì)得到的轉(zhuǎn)臺(tái)方位角測(cè)量數(shù)據(jù)和轉(zhuǎn)臺(tái)俯仰角測(cè)量數(shù)據(jù),分別利用改進(jìn)的限幅濾波算法進(jìn)行野值剔除;
6、s3.對(duì)野值剔除后的轉(zhuǎn)臺(tái)方位角測(cè)量數(shù)據(jù)和轉(zhuǎn)臺(tái)俯仰角測(cè)量數(shù)據(jù),分別進(jìn)行濾波估計(jì),得到各時(shí)刻對(duì)應(yīng)的轉(zhuǎn)臺(tái)方位角估計(jì)真實(shí)數(shù)據(jù)和轉(zhuǎn)臺(tái)俯仰角估計(jì)真實(shí)數(shù)據(jù);
7、s4.利用得到的各時(shí)刻的轉(zhuǎn)臺(tái)方位角理論數(shù)據(jù)、轉(zhuǎn)臺(tái)方位角估計(jì)真實(shí)數(shù)據(jù)、轉(zhuǎn)臺(tái)俯仰角理論數(shù)據(jù)和轉(zhuǎn)臺(tái)俯仰角估計(jì)真實(shí)數(shù)據(jù),計(jì)算對(duì)應(yīng)時(shí)刻的估計(jì)真實(shí)數(shù)據(jù)和理論數(shù)據(jù)之間的實(shí)際相似度;
8、s5.根據(jù)計(jì)算出的所有時(shí)刻的實(shí)際相似度,擬合出相似度函數(shù),計(jì)算出該時(shí)刻的估計(jì)相似度;
9、s6.針對(duì)n個(gè)連續(xù)新時(shí)刻中的每個(gè)時(shí)刻,得到該時(shí)刻的實(shí)際相似度,利用所述相似度函數(shù)得到該時(shí)刻的估計(jì)相似度,計(jì)算該時(shí)刻下實(shí)際相似度和估計(jì)相似度之差的絕對(duì)值,作為相似度差異值,其中,n為大于0的自然數(shù);
10、s7.判斷所述n個(gè)連續(xù)新時(shí)刻的相似度差異值是否滿(mǎn)足異動(dòng)條件,若是,則確定所述空間目標(biāo)發(fā)生異動(dòng);若否,則返回步驟s6。
11、進(jìn)一步的,所述步驟s1具體包括:利用空間目標(biāo)的軌道和轉(zhuǎn)臺(tái)的方位俯仰測(cè)量值,計(jì)算空間目標(biāo)在各時(shí)刻的轉(zhuǎn)臺(tái)方位角理論數(shù)據(jù)和轉(zhuǎn)臺(tái)俯仰角理論數(shù)據(jù),并獲取轉(zhuǎn)臺(tái)方位編碼器實(shí)時(shí)輸出的空間目標(biāo)在各時(shí)刻的轉(zhuǎn)臺(tái)方位角測(cè)量數(shù)據(jù),以及轉(zhuǎn)臺(tái)俯仰編碼器實(shí)時(shí)輸出的空間目標(biāo)在各時(shí)刻的轉(zhuǎn)臺(tái)俯仰角測(cè)量數(shù)據(jù)。
12、進(jìn)一步的,所述的步驟s2具體包括以下步驟:
13、s21.在限幅濾波算法基礎(chǔ)上提出以下用于野值剔除的初始公式:
14、(1)
15、式(1)中,表示野值剔除后的數(shù)據(jù),表示第個(gè)時(shí)刻對(duì)應(yīng)的采樣數(shù)據(jù),表示第個(gè)時(shí)刻對(duì)應(yīng)的采樣數(shù)據(jù),為大于或等于1的自然數(shù);
16、表示采樣數(shù)據(jù)對(duì)應(yīng)的閾值,當(dāng)采樣數(shù)據(jù)為轉(zhuǎn)臺(tái)方位角測(cè)量數(shù)據(jù)時(shí),野值剔除后的數(shù)據(jù)為野值剔除后的轉(zhuǎn)臺(tái)方位角測(cè)量數(shù)據(jù),為轉(zhuǎn)臺(tái)方位角測(cè)量數(shù)據(jù)對(duì)應(yīng)的閾值;當(dāng)采樣數(shù)據(jù)為轉(zhuǎn)臺(tái)俯仰角測(cè)量數(shù)據(jù)時(shí),野值剔除后的數(shù)據(jù)為野值剔除后的轉(zhuǎn)臺(tái)俯仰角測(cè)量數(shù)據(jù),為轉(zhuǎn)臺(tái)俯仰角測(cè)量數(shù)據(jù)對(duì)應(yīng)的閾值;
17、s22.設(shè)置式(1)中的:假設(shè)轉(zhuǎn)臺(tái)方位角或轉(zhuǎn)臺(tái)俯仰角的轉(zhuǎn)動(dòng)角加速度為,則有:
18、(2)
19、式(2)中,表示采樣間隔,yn-1表示第n-1個(gè)時(shí)刻對(duì)應(yīng)的采樣數(shù)據(jù),yn-2表示第n-2個(gè)時(shí)刻對(duì)應(yīng)的采樣數(shù)據(jù);
20、s23.結(jié)合式(1)和(2),對(duì)經(jīng)步驟s1得到的轉(zhuǎn)臺(tái)方位角測(cè)量數(shù)據(jù)和轉(zhuǎn)臺(tái)俯仰角測(cè)量數(shù)據(jù),分別利用改進(jìn)的限幅濾波算法進(jìn)行野值剔除,公式如下:
21、(3)
22、式(3)中,表示第個(gè)時(shí)刻對(duì)應(yīng)的采樣數(shù)據(jù),其余參數(shù)同式(1)。
23、進(jìn)一步的,所述的步驟s3具體以下步驟:
24、s31.確定針對(duì)目標(biāo)角度,即轉(zhuǎn)臺(tái)方位角或轉(zhuǎn)臺(tái)俯仰角的狀態(tài)模型為:
25、(4)
26、式(4)中,表示第個(gè)時(shí)刻的系統(tǒng)狀態(tài)矩陣,表示第個(gè)時(shí)刻的系統(tǒng)狀態(tài)矩陣,為大于或等于1的自然數(shù),表示第個(gè)時(shí)刻的狀態(tài)轉(zhuǎn)移矩陣,表示第個(gè)時(shí)刻的控制輸入矩陣,表示第個(gè)時(shí)刻的控制量,表示過(guò)程噪聲,期望值為0;
27、s32.確定針對(duì)所述目標(biāo)角度的觀測(cè)模型為:
28、(5)
29、式(5)中,表示第個(gè)時(shí)刻的系統(tǒng)狀態(tài)矩陣的觀測(cè)值或測(cè)量值,對(duì)應(yīng)野值剔除后的目標(biāo)角度測(cè)量數(shù)據(jù),也就是說(shuō),表示第個(gè)時(shí)刻的野值剔除后的目標(biāo)角度測(cè)量數(shù)據(jù),即第個(gè)時(shí)刻的野值剔除后的轉(zhuǎn)臺(tái)方位角測(cè)量數(shù)據(jù)或野值剔除后的轉(zhuǎn)臺(tái)俯仰角測(cè)量數(shù)據(jù);表示狀態(tài)觀測(cè)矩陣,表示第個(gè)時(shí)刻的測(cè)量噪聲;
30、s33.確定針對(duì)所述目標(biāo)角度的預(yù)測(cè)方程為:
31、(6)
32、式(6)所示的預(yù)測(cè)方程基于所述步驟s31中的狀態(tài)模型得到,其中,表示第個(gè)時(shí)刻的先驗(yàn)狀態(tài)估計(jì)值,表示第個(gè)時(shí)刻的最優(yōu)估計(jì)值,即第個(gè)時(shí)刻對(duì)應(yīng)的目標(biāo)角度估計(jì)真實(shí)數(shù)據(jù),表示第個(gè)時(shí)刻的先驗(yàn)估計(jì)協(xié)方差,表示第個(gè)時(shí)刻的后驗(yàn)估計(jì)協(xié)方差,即第個(gè)時(shí)刻的最優(yōu)估計(jì)協(xié)方差,at表示狀態(tài)轉(zhuǎn)移矩陣,表示系統(tǒng)噪聲協(xié)方差矩陣,其余參數(shù)同式(4)。
33、s34.基于迭代初始值、野值剔除后的目標(biāo)角度測(cè)量數(shù)據(jù)以及所述預(yù)測(cè)方程,迭代計(jì)算各時(shí)刻的最優(yōu)估計(jì)值,得到各時(shí)刻對(duì)應(yīng)的目標(biāo)角度估計(jì)真實(shí)數(shù)據(jù);其中,所述迭代初始值包括預(yù)設(shè)的初始最優(yōu)估計(jì)值和初始后驗(yàn)估計(jì)協(xié)方差。
34、進(jìn)一步的,所述的步驟s34可以包括以下步驟:
35、a1.確定恒定的狀態(tài)轉(zhuǎn)移矩陣、控制輸入矩陣和狀態(tài)觀測(cè)矩陣,確定系統(tǒng)噪聲協(xié)方差矩陣,確定觀測(cè)噪聲協(xié)方差,共同作為估計(jì)參數(shù);
36、a2.針對(duì)所述目標(biāo)角度,確定當(dāng)前次迭代對(duì)應(yīng)的最優(yōu)估計(jì)值和后驗(yàn)估計(jì)協(xié)方差,共同構(gòu)成當(dāng)前次迭代的輸入值;其中,首次迭代對(duì)應(yīng)的最優(yōu)估計(jì)值和后驗(yàn)估計(jì)協(xié)方差分別為預(yù)設(shè)的初始最優(yōu)估計(jì)值和初始后驗(yàn)估計(jì)協(xié)方差;
37、a3.基于所述估計(jì)參數(shù)、當(dāng)前次迭代的輸入值和所述預(yù)測(cè)方程,計(jì)算所述目標(biāo)角度的先驗(yàn)狀態(tài)估計(jì)值和先驗(yàn)估計(jì)協(xié)方差,得到以下結(jié)果:
38、(7)
39、a4.基于計(jì)算出的先驗(yàn)估計(jì)協(xié)方差和所述觀測(cè)噪聲協(xié)方差,利用卡爾曼增益計(jì)算公式計(jì)算出卡爾曼增益;
40、其中,所述卡爾曼增益的計(jì)算公式為:
41、(8)
42、式(8)中,表示第個(gè)時(shí)刻的卡爾曼增益,ht表示狀態(tài)觀測(cè)矩陣;
43、a5.基于計(jì)算出的卡爾曼增益、先驗(yàn)狀態(tài)估計(jì)值和第個(gè)時(shí)刻的野值剔除后的目標(biāo)角度測(cè)量數(shù)據(jù),利用最優(yōu)估計(jì)值計(jì)算公式,計(jì)算出最優(yōu)估計(jì)值;
44、其中,所述最優(yōu)估計(jì)值計(jì)算公式為:
45、(9)
46、式(9)中,最優(yōu)估計(jì)值表示第個(gè)時(shí)刻的目標(biāo)角度估計(jì)真實(shí)數(shù)據(jù);
47、a6.基于計(jì)算出的先驗(yàn)估計(jì)協(xié)方差和卡爾曼增益,利用最優(yōu)估計(jì)協(xié)方差計(jì)算公式,計(jì)算出后驗(yàn)估計(jì)協(xié)方差;
48、其中,所述最優(yōu)估計(jì)協(xié)方差計(jì)算公式為:
49、(10)
50、式(10)中,后驗(yàn)估計(jì)協(xié)方差表示第個(gè)時(shí)刻的最優(yōu)估計(jì)協(xié)方差;
51、a7.將計(jì)算出的最優(yōu)估計(jì)值和后驗(yàn)估計(jì)協(xié)方差共同構(gòu)成新一次迭代的輸入值,重復(fù)迭代,直至計(jì)算出各時(shí)刻對(duì)應(yīng)的目標(biāo)角度估計(jì)真實(shí)數(shù)據(jù)。
52、進(jìn)一步的,所述的步驟s34也可以包括以下步驟:
53、b1.確定狀態(tài)轉(zhuǎn)移矩陣,控制輸入矩陣,狀態(tài)觀測(cè)矩陣,根據(jù)控制系統(tǒng)精度確定系統(tǒng)噪聲協(xié)方差矩陣,根據(jù)所述觀測(cè)模型和傳感器精度確定觀測(cè)噪聲協(xié)方差,共同作為估計(jì)參數(shù);
54、b2.針對(duì)所述目標(biāo)角度,確定當(dāng)前次迭代對(duì)應(yīng)的最優(yōu)估計(jì)值和后驗(yàn)估計(jì)協(xié)方差,共同構(gòu)成當(dāng)前次迭代的輸入值;
55、其中,首次迭代對(duì)應(yīng)的最優(yōu)估計(jì)值和后驗(yàn)估計(jì)協(xié)方差分別為預(yù)設(shè)的初始最優(yōu)估計(jì)值和初始后驗(yàn)估計(jì)協(xié)方差;
56、b3.基于所述估計(jì)參數(shù)、當(dāng)前次迭代的輸入值和更新的預(yù)測(cè)方程,計(jì)算所述目標(biāo)角度的先驗(yàn)狀態(tài)估計(jì)值和先驗(yàn)估計(jì)協(xié)方差;
57、其中,所述更新的預(yù)測(cè)方程為:
58、(11);
59、b4.基于計(jì)算出的先驗(yàn)估計(jì)協(xié)方差和所述觀測(cè)噪聲協(xié)方差,利用更新的卡爾曼增益計(jì)算公式計(jì)算出卡爾曼增;
60、其中,所述更新的卡爾曼增益計(jì)算公式為:
61、(12);
62、b5.基于計(jì)算出的卡爾曼增益、先驗(yàn)狀態(tài)估計(jì)值和第個(gè)時(shí)刻的野值剔除后的目標(biāo)角度測(cè)量數(shù)據(jù),利用更新的最優(yōu)估計(jì)值計(jì)算公式,計(jì)算出最優(yōu)估計(jì)值,表示第個(gè)時(shí)刻目標(biāo)角度估計(jì)真實(shí)數(shù)據(jù);
63、其中,所述更新的最優(yōu)估計(jì)值計(jì)算公式為:
64、(13);
65、b6.基于計(jì)算出的先驗(yàn)估計(jì)協(xié)方差和卡爾曼增益,利用更新的最優(yōu)估計(jì)協(xié)方差計(jì)算公式,計(jì)算出后驗(yàn)估計(jì)協(xié)方差,表示第個(gè)時(shí)刻的最優(yōu)估計(jì)協(xié)方差;
66、其中,所述更新的最優(yōu)估計(jì)協(xié)方差計(jì)算公式為:
67、(14)
68、b7.將計(jì)算出的最優(yōu)估計(jì)值和后驗(yàn)估計(jì)協(xié)方差共同構(gòu)成新一次迭代的輸入值,重復(fù)迭代,直至計(jì)算出各時(shí)刻對(duì)應(yīng)的目標(biāo)角度估計(jì)真實(shí)數(shù)據(jù)。
69、進(jìn)一步的,所述的步驟s4所采用的公式為:
70、(15)
71、式(15)中,表示第個(gè)時(shí)刻計(jì)算出的實(shí)際相似度,表示第個(gè)時(shí)刻的轉(zhuǎn)臺(tái)方位角理論數(shù)據(jù),表示第個(gè)時(shí)刻的轉(zhuǎn)臺(tái)方位角估計(jì)真實(shí)數(shù)據(jù),表示第個(gè)時(shí)刻的轉(zhuǎn)臺(tái)俯仰角理論數(shù)據(jù),表示第個(gè)時(shí)刻的轉(zhuǎn)臺(tái)俯仰角估計(jì)真實(shí)數(shù)據(jù),為自然數(shù)。
72、進(jìn)一步的,所述的步驟s5中,根據(jù)所有時(shí)刻以及分別對(duì)應(yīng)的實(shí)際相似度,利用最小二乘法擬合出所述的相似度函數(shù)。
73、進(jìn)一步的,所述的步驟s6中,針對(duì)n個(gè)連續(xù)新時(shí)刻中的每個(gè)時(shí)刻,執(zhí)行步驟s1~s4,即可得到該時(shí)刻的實(shí)際相似度;執(zhí)行步驟s1~s5,即可得到該時(shí)刻的估計(jì)相似度;然后計(jì)算該時(shí)刻下實(shí)際相似度和估計(jì)相似度之差的絕對(duì)值,作為相似度差異值。
74、進(jìn)一步的,所述的步驟s7中,判斷所述n個(gè)連續(xù)新時(shí)刻的相似度差值是否滿(mǎn)足異動(dòng)條件,包括:判斷所述n個(gè)連續(xù)新時(shí)刻的相似度差異值中,是否有m個(gè)相似度差異值均大于預(yù)設(shè)閾值,若是,則確定滿(mǎn)足異動(dòng)條件;其中,m為大于0的自然數(shù),且n/2<m<n。
75、與現(xiàn)有技術(shù)相比,本發(fā)明的有益效果是:
76、1、本發(fā)明根據(jù)成像過(guò)程中跟蹤轉(zhuǎn)臺(tái)方位、俯仰角變化,建立數(shù)學(xué)模型,評(píng)估測(cè)量數(shù)據(jù)和理論數(shù)據(jù)的差距得到實(shí)際相似度,并進(jìn)行線性函數(shù)擬合以預(yù)測(cè)新時(shí)刻的估計(jì)相似度,利用新時(shí)刻的估計(jì)相似度和實(shí)際相似度的差異來(lái)快速發(fā)現(xiàn)空間目標(biāo)的異動(dòng),該方法能夠提高研判時(shí)效性,為數(shù)據(jù)運(yùn)用提供支撐。
77、2、本發(fā)明相較于傳統(tǒng)的基于目標(biāo)在相機(jī)視場(chǎng)位置誤差的異動(dòng)檢測(cè)方法,無(wú)需完成天文定位,方法更加簡(jiǎn)單,在對(duì)目標(biāo)進(jìn)行特性成像的同時(shí)能夠快速檢測(cè)出目標(biāo)軌道異動(dòng),時(shí)效性更高,實(shí)現(xiàn)了資源整合運(yùn)用。
78、3、本發(fā)明方法填補(bǔ)了利用在軌衛(wèi)星小口徑望遠(yuǎn)鏡對(duì)目標(biāo)軌道異動(dòng)進(jìn)行檢測(cè)判別的空白,可基于成像輔助數(shù)據(jù)快速檢測(cè)出目標(biāo)軌道異動(dòng),有效降低了因軌道機(jī)動(dòng)造成的空間目標(biāo)碰撞風(fēng)險(xiǎn),能夠提高空間目標(biāo)在軌運(yùn)行的安全性。
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!