一種醫療器械自動識別計數方法、系統
本發明涉及計算機數據處理,特別涉及一種醫療器械自動識別計數方法、系統。
背景技術:
1、隨著醫療行業的快速發展,醫療器械的種類和數量日益增加,醫療器械的管理和使用變得愈加復雜。醫療器械的準確計數和分類對于醫院、診所及相關供應鏈的運營至關重要,尤其是在器械的采購、存儲、分配和使用過程中,確保器械數量準確無誤是保證醫療安全和提高工作效率的關鍵。
2、目前,醫療器械的計數工作一般依賴于人工操作或傳統的手動盤點方式。這種方式不僅效率低下,而且容易受到人為錯誤的影響。在大量醫療器械批次的管理過程中,人工計數的誤差往往難以避免。此外,人工計數也需要較多的時間和人力成本,且無法快速響應設備庫存、配送等方面的需求,導致醫療機構在使用過程中經常出現缺貨、過期或者庫存不準確等問題。
技術實現思路
1、本發明目的之一在于提供了一種醫療器械自動識別計數方法,通過自動化的圖像識別和稱重技術,能夠大大減少人力成本,提高計數的準確性,避免人工計數中的疏漏和錯誤;能夠迅速地處理大量醫療器械,極大提升了計數效率,能夠快速響應設備庫存、配送等方面的需求;圖像識別技術能夠準確識別各種不同的醫療器械類型,并與標準重量匹配,使得系統能夠應對各種復雜的醫療器械包裝,進一步避免了人工分類和匹配的繁瑣操作。
2、本發明實施例提供的一種醫療器械自動識別計數方法,包括:
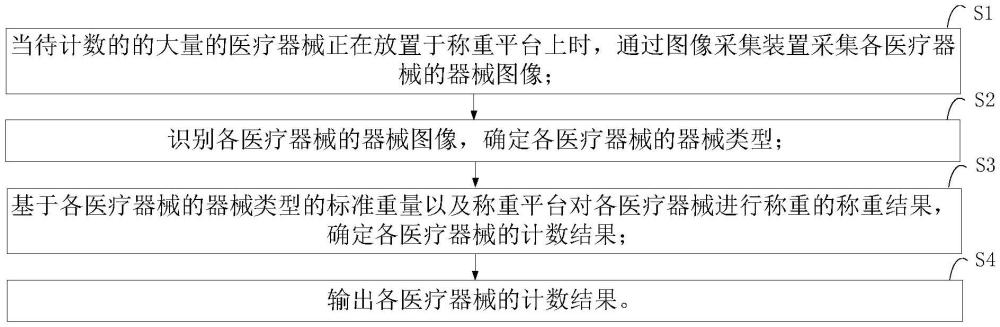
3、當待計數的的大量的醫療器械正在放置于稱重平臺上時,通過圖像采集裝置采集各醫療器械的器械圖像;
4、識別各醫療器械的器械圖像,確定各醫療器械的器械類型;
5、基于各醫療器械的器械類型的標準重量以及稱重平臺對各醫療器械進行稱重的稱重結果,確定各醫療器械的計數結果;
6、輸出各醫療器械的計數結果。
7、可選的,所述識別各醫療器械的器械圖像,確定各醫療器械的器械類型,包括:
8、將各醫療器械的器械圖像分別與標準器械圖像庫中的多個標準器械圖像進行匹配;
9、當匹配符合時,將匹配符合的多個標準器械圖像的標準器械類型作為各醫療器械的器械類型。
10、可選的,所述基于基于各醫療器械的器械類型的標準重量以及稱重平臺對各醫療器械進行稱重的稱重結果,確定各醫療器械的計數結果,包括:
11、對各醫療器械的器械類型的標準重量進行隨機組合,獲得多個重量集;
12、計算各重量集的重量和;
13、基于重量和與稱重結果之間相差最小的重量集中的標準重量的數量以及對應器械類型,確定各醫療器械的計數結果。
14、可選的,所述通過圖像采集裝置采集各醫療器械的器械圖像,包括:
15、獲取各醫療器械的放置于稱重平臺上的放置軌跡;
16、基于各醫療器械放置于稱重平臺上的放置順序,將對應各醫療器械的放置軌跡進行排序,獲得放置軌跡序列;
17、基于放置軌跡序列,規劃拍攝軌跡序列;
18、基于拍攝軌跡序列,控制圖像采集裝置采集各醫療器械的器械圖像。
19、可選的,所述基于放置軌跡序列,規劃拍攝軌跡序列,包括:
20、基于局部序列劃分約束,在放置軌跡序列中劃分出多個局部序列;
21、按照各局部序列在放置軌跡序列中的序列先后順序,依次遍歷各局部序列;
22、每次遍歷時,基于拍攝軌跡規劃約束,規劃遍歷到的局部序列的局部拍攝軌跡序列;
23、遍歷各局部序列結束后,將每次遍歷規劃的局部拍攝軌跡序列按照遍歷先后順序進行拼接,獲得拍攝軌跡序列;
24、其中,局部序列劃分約束包括:
25、約束一、同一局部序列包含放置軌跡序列中連續的至少n個放置軌跡;n為正整數;
26、以及,約束二、不同局部序列中的放置軌跡互不相同;
27、以及,約束三、同一局部序列中相鄰放置軌跡中前者后第一比例的第一軌跡段與后者前第二比例的第二軌跡段之間具備拍攝翻轉空間;其中,拍攝翻轉空間包括:第一軌跡段上前、中、末三點所在第一平面與第二軌跡段上前、中、末三點所在第二平面之間半徑長為半徑值、球心到第一平面與第二平面各自的垂直距離不超過距離閾值的球形空間;
28、其中,拍攝軌跡規劃約束包括:
29、約束四、圖像采集裝置沿拍攝軌跡序列中第i個拍攝軌跡拍攝時,可持續變化全部標準拍攝姿態對沿遍歷到的局部序列中第i個放置軌跡放置于稱重平臺上的醫療器械進行拍攝;i=1,2,…,n;n為拍攝軌跡序列中拍攝軌跡的總數目或遍歷到的局部序列中放置軌跡的總數目;i每次取相同值;
30、以及,約束五、拍攝軌跡序列中第i個拍攝軌跡的終點為遍歷到的局部序列中第i組相鄰放置軌跡的拍攝翻轉空間的球心;i每次取相同值;
31、以及,約束六、圖像采集裝置沿拍攝軌跡序列中第i個、第i+1個拍攝軌跡拍攝時,在遍歷到的局部序列中第i組相鄰放置軌跡的拍攝翻轉空間內進行至少一個鏡頭翻轉;i每次取相同值。
32、本發明實施例提供的一種醫療器械自動識別計數系統,包括:
33、采集模塊,用于當待計數的的大量的醫療器械正在放置于稱重平臺上時,通過圖像采集裝置采集各醫療器械的器械圖像;
34、識別模塊,用于識別各醫療器械的器械圖像,確定各醫療器械的器械類型;
35、確定模塊,用于基于各醫療器械的器械類型的標準重量以及稱重平臺對各醫療器械進行稱重的稱重結果,確定各醫療器械的計數結果;
36、輸出模塊,用于輸出各醫療器械的計數結果。
37、可選的,
38、所述識別模塊識別各醫療器械的器械圖像,確定各醫療器械的器械類型,包括:
39、將各醫療器械的器械圖像分別與標準器械圖像庫中的多個標準器械圖像進行匹配;
40、當匹配符合時,將匹配符合的多個標準器械圖像的標準器械類型作為各醫療器械的器械類型。
41、可選的,所述確定模塊基于基于各醫療器械的器械類型的標準重量以及稱重平臺對各醫療器械進行稱重的稱重結果,確定各醫療器械的計數結果,包括:
42、對各醫療器械的器械類型的標準重量進行隨機組合,獲得多個重量集;
43、計算各重量集的重量和;
44、基于重量和與稱重結果之間相差最小的重量集中的標準重量的數量以及對應器械類型,確定各醫療器械的計數結果。
45、可選的,所述采集模塊通過圖像采集裝置采集各醫療器械的器械圖像,包括:
46、若各醫療器械是打包件時,獲取各醫療器械打包件放置于稱重平臺上的放置軌跡;
47、基于各醫療器械放置于稱重平臺上的放置順序,將對應各醫療器械的放置軌跡進行排序,獲得放置軌跡序列;
48、基于放置軌跡序列,規劃拍攝軌跡序列;
49、基于拍攝軌跡序列,控制圖像采集裝置采集各醫療器械的器械圖像。
50、可選的,所述采集模塊基于放置軌跡序列,規劃拍攝軌跡序列,包括:
51、基于局部序列劃分約束,在放置軌跡序列中劃分出多個局部序列;
52、按照各局部序列在放置軌跡序列中的序列先后順序,依次遍歷各局部序列;
53、每次遍歷時,基于拍攝軌跡規劃約束,規劃遍歷到的局部序列的局部拍攝軌跡序列;
54、遍歷各局部序列結束后,將每次遍歷規劃的局部拍攝軌跡序列按照遍歷先后順序進行拼接,獲得拍攝軌跡序列;
55、其中,局部序列劃分約束包括:
56、約束一、同一局部序列包含放置軌跡序列中連續的至少n個放置軌跡;n為正整數;
57、以及,約束二、不同局部序列中的放置軌跡互不相同;
58、以及,約束三、同一局部序列中相鄰放置軌跡中前者后第一比例的第一軌跡段與后者前第二比例的第二軌跡段之間具備拍攝翻轉空間;其中,拍攝翻轉空間包括:第一軌跡段上前、中、末三點所在第一平面與第二軌跡段上前、中、末三點所在第二平面之間半徑長為半徑值、球心到第一平面與第二平面各自的垂直距離不超過距離閾值的球形空間;
59、其中,拍攝軌跡規劃約束包括:
60、約束四、圖像采集裝置沿拍攝軌跡序列中第i個拍攝軌跡拍攝時,可持續變化全部標準拍攝姿態對沿遍歷到的局部序列中第i個放置軌跡放置于稱重平臺上的醫療器械打包件進行拍攝;i=1,2,…,n;n為拍攝軌跡序列中拍攝軌跡的總數目或遍歷到的局部序列中放置軌跡的總數目;i每次取相同值;
61、以及,約束五、拍攝軌跡序列中第i個拍攝軌跡的終點為遍歷到的局部序列中第i組相鄰放置軌跡的拍攝翻轉空間的球心;i每次取相同值;
62、以及,約束六、圖像采集裝置沿拍攝軌跡序列中第i個、第i+1個拍攝軌跡拍攝時,在遍歷到的局部序列中第i組相鄰放置軌跡的拍攝翻轉空間內進行至少一個鏡頭翻轉;i每次取相同值。
63、本發明的其它特征和優點將在隨后的說明書中闡述,并且,部分地從說明書中變得顯而易見,或者通過實施本發明而了解。本發明的目的和其他優點可通過在所寫的說明書以及附圖中所特別指出的結構來實現和獲得。
64、下面通過附圖和實施例,對本發明的技術方案做進一步的詳細描述。
- 還沒有人留言評論。精彩留言會獲得點贊!