一種空間目標精跟相機和二維轉臺兩級安裝誤差外場標定方法與流程
本發明涉及誤差標定,特別涉及一種空間目標精跟相機和二維轉臺兩級安裝誤差外場標定方法。
背景技術:
1、空間目標精跟相機主要用于對宇宙中的各類空間目標,進行精確跟蹤和觀測,它能夠為空間目標探測等任務提供高實時性、高精度的數據支撐,相關技術中,在軌二維轉臺帶動精跟相機指向空間目標有指向精度的要求,需要通過標定和地面試驗驗證精跟相機指向精度。
2、目前現有的方法僅對轉臺的安裝矩陣進行標定,無法同時對二維轉臺和安裝在其上的精跟相機的進行標定,這就導致實際的觀測結果難以滿足高精度要求。
3、基于此,目前亟需一種空間目標精跟相機和二維轉臺兩級安裝誤差外場標定方法來解決上述技術問題。
技術實現思路
1、本發明提供了一種空間目標精跟相機和二維轉臺兩級安裝誤差外場標定方法,可以解決相關技術無法同時標定二維轉臺和精跟相機的問題。技術方案如下:
2、一方面,提供了一種空間目標精跟相機和二維轉臺兩級安裝誤差外場標定方法,所述方法包括:
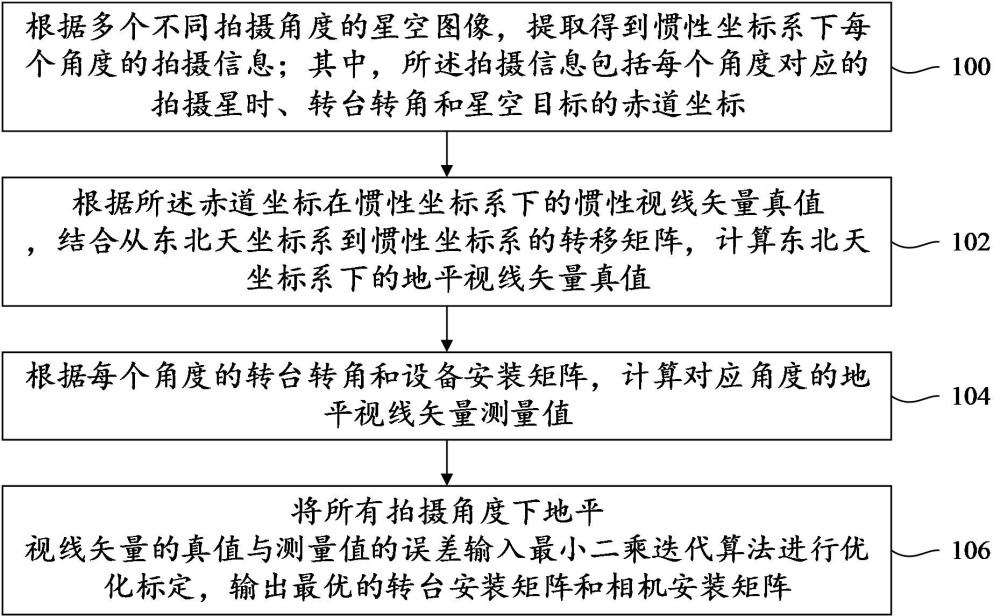
3、根據多個不同拍攝角度的星空圖像,提取得到慣性坐標系下每個角度的拍攝信息;其中,所述拍攝信息包括每個角度對應的拍攝星時、轉臺轉角和星空目標的赤道坐標;
4、根據所述赤道坐標在慣性坐標系下的慣性視線矢量真值,結合從東北天坐標系到慣性坐標系的轉移矩陣,計算東北天坐標系下的地平視線矢量真值;其中,所述轉移矩陣是根據拍攝地點的地理經緯度信息計算得到的;
5、根據每個角度的轉臺轉角和設備安裝矩陣,計算對應角度的地平視線矢量測量值;
6、將所有拍攝角度下地平視線矢量的真值和測量值的誤差輸入最小二乘迭代算法進行優化標定,輸出最優的轉臺安裝矩陣和相機安裝矩陣。
7、另一方面,提供了一種空間目標精跟相機和二維轉臺兩級安裝誤差外場標定裝置,所述裝置包括:
8、提取模塊,用于根據多個不同拍攝角度的星空圖像,提取得到慣性坐標系下每個角度的拍攝信息;其中,所述拍攝信息包括每個角度對應的拍攝星時、轉臺轉角和星空目標的赤道坐標;
9、第一計算模塊,用于根據所述赤道坐標在慣性坐標系下的慣性視線矢量真值,結合從東北天坐標系到慣性坐標系的轉移矩陣,計算東北天坐標系下的地平視線矢量真值;其中,所述轉移矩陣是根據拍攝地點的地理經緯度信息計算得到的;
10、第二計算模塊,用于根據每個角度的轉臺轉角和設備安裝矩陣,計算對應角度的地平視線矢量測量值;
11、優化模塊,將所有拍攝角度下地平視線矢量的真值和測量值的誤差輸入最小二乘迭代算法進行優化標定,輸出最優的轉臺安裝矩陣和相機安裝矩陣。
12、另一方面,提供了一種計算機設備,所述計算機設備包括存儲器和處理器,所述存儲器用于存放計算機程序,所述處理器用于執行所述存儲器上所存放的計算機程序,以實現上述所述的空間目標精跟相機和二維轉臺兩級安裝誤差外場標定方法的步驟。
13、另一方面,提供了一種計算機可讀存儲介質,所述存儲介質內存儲有計算機程序,所述計算機程序被處理器執行時實現上述所述空間目標精跟相機和二維轉臺兩級安裝誤差外場標定方法的步驟。
14、另一方面,提供了一種計算機程序產品,包括計算機程序,所述計算機程序被處理器執行時實現上述所述的空間目標精跟相機和二維轉臺兩級安裝誤差外場標定方法的步驟。
15、本發明提供的技術方案至少可以帶來以下有益效果:首先通過拍攝得到的多個不同角度的星空圖像,確定拍攝地點慣性坐標系下的真實赤道坐標、轉角信息和拍攝星時;再結合該拍攝地點的地理經緯度數據,計算拍攝時刻的坐標系轉移矩陣;根據真實赤道坐標和轉移矩陣計算東北天坐標系下的地平視線矢量真值;根據轉角信息和安裝矩陣計算地平視線矢量測量值;最后利用最小二乘迭代對視線矢量的真值和測量值進行標定,得到最優的轉臺安裝矩陣和相機安裝矩陣。該方法有效解決了地面試驗二維轉臺和精跟相機的指向精度受二維轉臺安裝和精跟相機安裝不垂直度的影響,提高了精跟相機的指向精度。
技術特征:
1.一種空間目標精跟相機和二維轉臺兩級安裝誤差外場標定方法,其特征在于,所述方法包括:
2.根據權利要求1所述的方法,其特征在于,所述拍攝角度包括至少6個,每個拍攝角度值均相等,且所有拍攝角度之和覆蓋全天區的指向。
3.根據權利要求1所述的方法,其特征在于,所述轉移矩陣通過如下公式計算得到:
4.根據權利要求3所述的方法,其特征在于,所述地平視線矢量的真值通過如下公式計算:
5.根據權利要求4所述的方法,其特征在于,所述地平視線矢量的測量值通過如下公式計算:
6.根據權利要求1所述的方法,其特征在于,所述將所有拍攝角度下地平視線矢量的真值和測量值的誤差輸入最小二乘迭代算法進行優化標定,輸出最優的轉臺安裝矩陣和相機安裝矩陣,包括:
7.一種空間目標精跟相機和二維轉臺兩級安裝誤差外場標定裝置,其特征在于,所述裝置包括:
8.一種計算機設備,其特征在于,所述計算機設備包括存儲器和處理器,所述存儲器用于存放計算機程序,所述處理器用于執行所述存儲器上所存放的計算機程序,以實現上述權利要求1-6任一所述方法的步驟。
9.一種計算機可讀存儲介質,其特征在于,所述存儲介質內存儲有計算機程序,所述計算機程序被處理器執行時實現權利要求1-6任一所述的方法的步驟。
10.一種計算機程序產品,其特征在于,包括計算機程序,所述計算機程序被處理器執行時實現權利要求1-6任一所述的方法的步驟。
技術總結
本發明公開了一種空間目標精跟相機和二維轉臺兩級安裝誤差外場標定方法,屬于誤差標定技術領域。方法包括:根據多個不同拍攝角度的星空圖像,提取得到慣性坐標系下每個角度的拍攝信息;根據赤道坐標在慣性坐標系下的慣性視線矢量真值,結合從東北天坐標系到慣性坐標系的轉移矩陣,計算東北天坐標系下的地平視線矢量真值;根據每個角度的轉臺轉角和設備安裝矩陣,計算對應角度的地平視線矢量測量值;將所有拍攝角度下地平視線矢量的真值和測量值的誤差輸入最小二乘迭代算法進行優化標定,輸出最優的轉臺安裝矩陣和相機安裝矩陣。本發明能夠實現地面試驗二維轉臺精跟相機的標定,提高了精跟相機的指向精度。
技術研發人員:常洛南,常亞菲,于強,劉潔,李超,邢林峰,魏春嶺,王麗嬌,晁子翕,王小麗
受保護的技術使用者:北京控制工程研究所
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!