基于數理統計原理的線結構光平面的標定方法
本發明屬于機器視覺,尤其涉及一種基于數理統計原理的線結構光平面的標定方法。
背景技術:
1、在線結構光測量系統中,測量的精度取決于系統標定的精度,而線結構光的標定是系統標定中的關鍵部分,低質量的線結構光標定會產生明顯的系統誤差,直接影響視覺系統的位姿測量精度。目前提出的很多方法都是基于共線點成像的交比不變性,這些方法使用光條直線上的點作為光平面的擬合要素,使用的投影幾何性質簡單,易受相機畸變影響,且標定過程中涉及多次坐標變換和激光直線方程擬合計算,二者的疊加作用不可避免的給光平面標定帶來誤差,從而影響視覺測量系統的測量精度。
技術實現思路
1、有鑒于此,本發明創造旨在提供一種基于數理統計原理的線結構光平面的標定方法,基于數理統計原理,對較多的光平面特征點進行光平面的擬合,并利用誤差離群值剔除操作對光平面標定結果進行統計篩選,在提高光刀中心點提取精度的同時,也提高了光平面的標定精度。
2、為達到上述目的,本發明創造的技術方案是這樣實現的:
3、一種基于數理統計原理的線結構光平面的標定方法,包括:
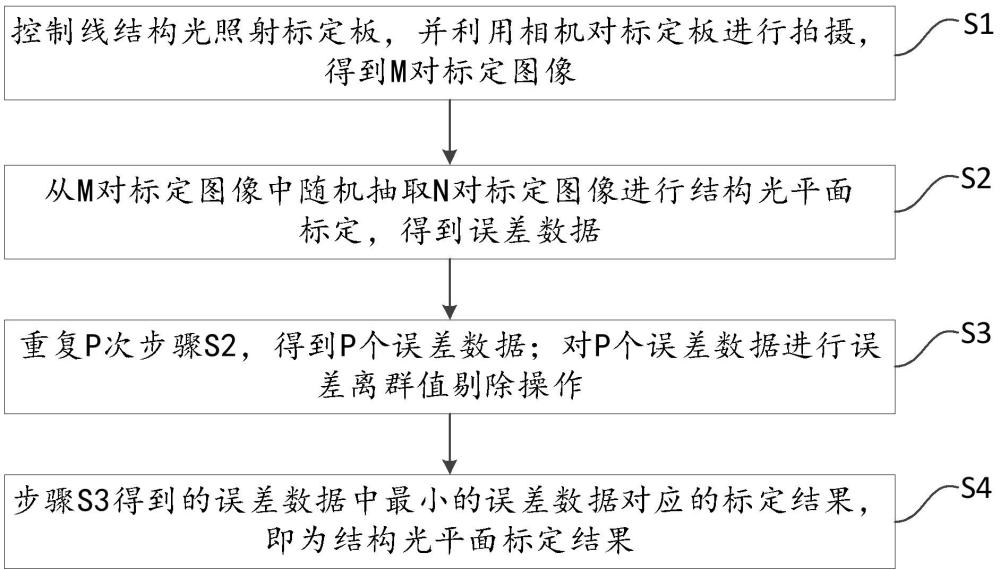
4、s1:控制線結構光照射標定板,并利用相機對標定板進行拍攝,得到m對標定圖像;
5、s2:從m對標定圖像中隨機抽取n對標定圖像進行結構光平面標定,得到誤差數據;
6、s3:重復p次步驟s2,得到p個誤差數據;對p個誤差數據進行誤差離群值剔除操作;
7、s4:步驟s3得到的誤差數據中最小的誤差數據對應的標定結果,即為結構光平面標定結果。
8、進一步的,步驟s1包括:
9、s11:利用相機對標定板進行拍攝,得到標定板圖像;
10、s12:保持標定板的位姿不變,采用線結構光照射標定板,并利用相機對所述標定板進行拍攝,得到結構光圖像;
11、s13:步驟s12得到的結構光圖像與步驟s11拍攝到的標定板圖像為一對標定圖像;調整標定板的位姿,并重復m次步驟s11~s12,得到m對標定圖像。
12、進一步的,步驟s2包括:
13、s21:根據步驟s1得到的標定圖像中的標定板圖像,確定從標定板的標定板坐標系到相機的相機坐標系之間的外參變換矩陣;
14、s22:利用步驟s21得到的外參變換矩陣,計算標定板在相機坐標系下的第一空間平面方程;
15、s23:對標定圖像中的結構光圖像中的結構光條進行識別分割,從分割得到的結構光刀中提取出中心點集合;
16、s24:根據小孔成像模型和步驟s22得到的第一空間平面方程,計算步驟s23得到的中心點集合在相機坐標系下的空間坐標;
17、s25:重復步驟s21~s24對n對標定圖像進行處理,對應得到n組空間坐標;將n組空間坐標進行平面擬合,得到線結構光的空間平面的第二空間平面方程,第二空間平面方程即為標定結果;
18、s26:計算每張結構光圖像中的結構光條上的點到步驟s25計算得到的空間平面的距離;計算所有距離的平均值即為誤差數據。
19、進一步的,在步驟s21之前還包括:根據步驟s1得到的標定圖像中的標定板圖像,確定相機的相機內參矩陣和相機畸變系數。
20、進一步的,在步驟s22中,利用步驟s21得到的外參變換矩陣,將標定板上的標定點在標定板坐標系下的第一空間坐標轉換為相機坐標系下的第二空間坐標;利用最小二乘法對第二空間坐標進行擬合,得到第一空間平面方程。
21、進一步的,步驟s23包括:
22、s231:對結構光圖像進行目標識別和分割處理,得到只有結構光刀為前景的分割圖像;
23、s232:利用灰度重心法對結構光刀進行骨架提取,得到初步中心點集合;
24、s233:利用ransac方法對步驟s232得到的初步中心點集合進行直線擬合,再將初步中心點集合中的橫坐標帶入擬合得到的直線方程中,得到中心點集合。
25、進一步的,在步驟s25中,將n組空間坐標進行進行最小二乘平面擬合,得到所述線結構光的空間平面的第二空間平面方程。
26、進一步的,步驟s3的誤差離群值剔除操作包括:
27、s31:計算誤差數據的均值,并統計符合均值閾值范圍的誤差數據,以及符合均值閾值范圍的誤差數據的個數;
28、s32:以步驟s31的得到的誤差數據重新執行步驟s31,直至符合均值閾值范圍的誤差數據的個數不再變化。
29、進一步的,均值閾值范圍為,其中,表示誤差數據的均值,表示均值閾值范圍的邊界。
30、與現有技術相比,本發明創造能夠取得如下有益效果:
31、(1)本發明創造所述的基于數理統計原理的線結構光平面的標定方法中,基于數理統計原理,對較多的光平面特征點進行光平面的擬合,并利用誤差離群值剔除操作對光平面標定結果進行統計篩選,在提高光刀中心點提取精度的同時,也提高了光平面的標定精度。本發明流程簡單方便,適應于工程應用。
32、(2)本發明創造所述的基于數理統計原理的線結構光平面的標定方法中,采用基于ransac的直線擬合方法對提取的骨架進行二次擬合校正,以減少噪聲點對光平面標定精度的影響。
技術特征:
1.一種基于數理統計原理的線結構光平面的標定方法,其特征在于,包括:
2.根據權利要求1所述的基于數理統計原理的線結構光平面的標定方法,其特征在于,步驟s1包括:
3.根據權利要求1所述的基于數理統計原理的線結構光平面的標定方法,其特征在于,步驟s2包括:
4.根據權利要求3所述的基于數理統計原理的線結構光平面的標定方法,其特征在于,在步驟s21之前還包括:根據步驟s1得到的所述標定圖像中的標定板圖像,確定所述相機的相機內參矩陣和相機畸變系數。
5.根據權利要求3所述的基于數理統計原理的線結構光平面的標定方法,其特征在于,在步驟s22中,利用步驟s21得到的外參變換矩陣,將所述標定板上的標定點在所述標定板坐標系下的第一空間坐標轉換為所述相機坐標系下的第二空間坐標;利用最小二乘法對所述第二空間坐標進行擬合,得到所述第一空間平面方程。
6.根據權利要求3所述的基于數理統計原理的線結構光平面的標定方法,其特征在于,步驟s23包括:
7.根據權利要求3所述的基于數理統計原理的線結構光平面的標定方法,其特征在于,在步驟s25中,將n組空間坐標進行進行最小二乘平面擬合,得到所述線結構光的空間平面的第二空間平面方程。
8.根據權利要求1所述的基于數理統計原理的線結構光平面的標定方法,其特征在于,步驟s3的誤差離群值剔除操作包括:
9.根據權利要求8所述的基于數理統計原理的線結構光平面的標定方法,其特征在于,所述均值閾值范圍為,其中,表示所述誤差數據的均值,表示所述均值閾值范圍的邊界。
技術總結
本發明涉及機器視覺技術領域,尤其涉及一種基于數理統計原理的線結構光平面的標定方法,首先利用相機對標定板進行拍攝,得到標定板圖像得到多對標定圖像;從標定圖像中隨機抽取多對標定圖像進行結構光平面標定,得到對應的誤差數據;對誤差數據進行誤差離群值剔除操作;得到的誤差數據中最小的誤差數據對應的標定結果,即為結構光平面標定結果。本發明基于數理統計原理,對較多的光平面特征點進行光平面的擬合,并對光平面標定結果進行統計篩選,在提高光刀中心點提取精度的同時,也提高了光平面的標定精度。
技術研發人員:馬天嬌,任宏,初永志,姜金辰,田睿
受保護的技術使用者:中國科學院長春光學精密機械與物理研究所
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!