基于北斗和低空遙感數據的協同感知網絡構建方法與流程
本發明涉及數據處理,具體涉及基于北斗和低空遙感數據的協同感知網絡構建方法。
背景技術:
1、?北斗定位?是指利用北斗衛星導航系統進行定位的技術。北斗衛星導航系統是中國自主研發的全球衛星導航系統,與gps、glonass、galileo并稱為全球四大衛星導航系統之一。?北斗定位的工作原理是通過接收北斗衛星發送的信號,計算出接收機的經度、緯度、高度和時間等信息。首次定位至少需要4顆衛星,以達到3d定位的精確度。?低空遙感?是指利用飛行高度較低(一般指高度在1000米以下的空域)的航空平臺,如無人機、輕型飛機等,搭載各種傳感器,從空中獲取地球表面信息的科學技術?。低空遙感是一種非接觸、遠距離的探測技術,通過傳感器或遙感器獲取目標地物的反射、輻射或散射的電磁波信息,并進行處理和分析?。低空遙感主要應用于以下場景:國土資源調查?:用于突發應急監測、重點區域監測、遙感采樣定標等?。農業?:進行農業資源調查、精準施肥、噴灑農藥、土地確權等工作?。城市治理?:用于河道巡防、違章建筑監測等?。森林防火?:提供遠程監控、日常巡護、應急飛行等服務?。
2、?協同感知(collaborative?perception)?是一種通過多傳感器協作增強感知效果的技術,涉及數據處理、分布式計算和人工智能(ai)。它通過多個傳感器之間的相互協作,整合傳感器收集到的數據,以產生更準確、更完整的感知結果。協同感知解決了單體感知中遠距離遮擋和稀疏數據的問題,通常涉及的算法和技術包括數據處理、分布式計算和人工智能?,在多無人機低空遙感數據和北斗數據的融合中,傳統技術通常需要將多個傳感器進行時間同步,再將數據進行融合,時間同步是一個復雜的算法并且計算量很大,導致北斗數據和低空遙感數據的協同感知效率低。
技術實現思路
1、本發明的目的是提供基于北斗和低空遙感數據的協同感知網絡構建方法,該方法通過北斗定位系統與低空遙感系統進行協同感知,可以精確地獲得待測目標地的三維模型地圖,能夠協助國土資源調查,農業資源調查和城市日常遠程監控和日常巡護。
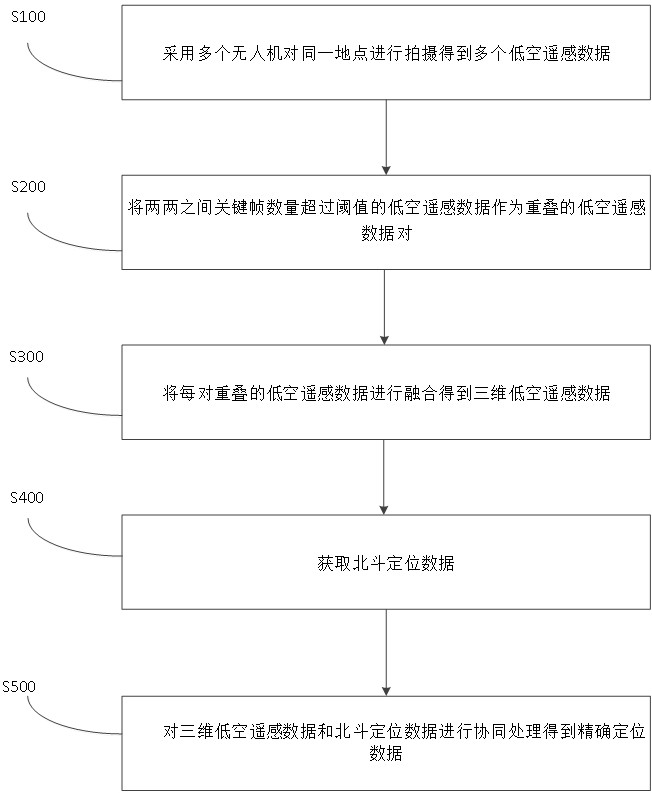
2、基于北斗和低空遙感數據的協同感知網絡構建方法,包括:
3、采用多個無人機對同一地點進行拍攝得到多個低空遙感數據;
4、將兩兩之間關鍵幀相似度超過閾值的低空遙感數據作為重疊的低空遙感數據對;
5、將每對重疊的低空遙感數據進行融合得到三維低空遙感數據;
6、獲取北斗定位數據;
7、對所述三維低空遙感數據和北斗定位數據進行協同處理得到精確定位數據。
8、優選地,所述將兩兩之間關鍵幀相似度超過閾值的低空遙感數據作為重疊的低空遙感數據對包括:
9、將關鍵幀相似度超過閾值的兩個低空遙感數據作為相鄰的低空遙感數據;
10、將相鄰的遙感數據進行拼接得到三維低空遙感數據。
11、優選地,所述對所述三維低空遙感數據和北斗定位數據進行協同處理得到精確定位數據包括:
12、識別三維低空遙感數據中的關鍵特征;
13、計算所述關鍵特征與北斗定位數據的相似度;
14、如果相似度小于預設值,則采用北斗定位數據對三維低空遙感數據進行修正。
15、優選地,所述識別三維低空遙感數據中的關鍵特征包括:
16、采用yolov8網絡,檢測遙感數據中的關鍵特征,輸出多個特征點;
17、所述yolov8網絡包括:輸入層、backbone層、neck層、head層和輸出層;
18、采用基于正樣本分配策略作為損失函數。
19、優選地,所述如果相似度小于預設值,則采用北斗定位數據對三維低空遙感數據進行修正包括:
20、根據北斗定位數據和三維低空遙感數據計算定位修正因子;
21、根據定位修正因子對三維低空遙感數據進行修正。
22、優選地,所述計算所述關鍵特征與北斗定位數據的相似度包括:
23、根據關鍵特征與北斗定位數據的距離判斷關鍵特征與北斗定位數據的相似度。
24、優選地,所述將關鍵幀相似度超過閾值的兩個低空遙感數據作為相鄰的低空遙感數據包括:
25、根據視圖夾角、重疊面積和尺度因子計算每個遙感數據的得分;
26、根據每個遙感數據的得分判斷哪兩對遙感數據屬于相鄰。
27、基于北斗和低空遙感數據的協同感知網絡構建系統,包括:
28、數據獲取模塊,用于獲取低空遙感數據和北斗定位數據;
29、數據處理模塊,對所述低空遙感數據和北斗定位數據進行協同處理得到精確定位數據;
30、路徑規劃模塊,用于根據所述精確定位數據構建導航路徑。
31、一種電子設備,包括:芯片、處理器和存儲器,所述存儲器用于存儲計算機程序代碼,所述計算機程序代碼包括計算機指令,在所述芯片執行所述計算機指令的情況下,所述電子設備執行基于北斗和低空遙感數據的協同感知網絡構建方法。
32、一種計算機可讀存儲介質,所述計算機可讀存儲介質中存儲有計算機程序,所述計算機程序包括程序指令,所述程序指令在被電子設備的處理器執行的情況下,使所述處理器執行基于北斗和低空遙感數據的協同感知網絡構建方法。
33、本發明的有益效果在于:1.本發明首先對多個無人機拍攝的遙感數據集合進行處理,篩選出可以進行拼接的遙感數據對,融合多個遙感數據對得到初步的三維低空遙感數據;2.本發明利用北斗定位數據對三維低空遙感數據進行協同處理,最后得到精確的定位數據,能夠協助國土資源調查,農業資源調查和城市日常遠程監控和日常巡護;3.本發明無需對多個傳感器的時間進行同步,而是通過建立每個低空遙感數據的得分以及和北斗數據的相似度進行低空遙感數據以及北斗數據的融合,算法更加簡單,工作效率高。
技術特征:
1.基于北斗和低空遙感數據的協同感知網絡構建方法,其特征在于,包括:
2.根據權利要求1所述的基于北斗和低空遙感數據的協同感知網絡構建方法,其特征在于,所述將兩兩之間關鍵幀相似度超過閾值的低空遙感數據作為重疊的低空遙感數據對包括:
3.根據權利要求1所述的基于北斗和低空遙感數據的協同感知網絡構建方法,其特征在于,所述對所述三維低空遙感數據和北斗定位數據進行協同處理得到精確定位數據包括:
4.根據權利要求3所述的基于北斗和低空遙感數據的協同感知網絡構建方法,其特征在于,所述識別三維低空遙感數據中的關鍵特征包括:
5.根據權利要求3所述的基于北斗和低空遙感數據的協同感知網絡構建方法,其特征在于,所述如果相似度小于預設值,則采用北斗定位數據對三維低空遙感數據進行修正包括:
6.根據權利要求3所述的基于北斗和低空遙感數據的協同感知網絡構建方法,其特征在于,所述計算所述關鍵特征與北斗定位數據的相似度包括:
7.根據權利要求2所述的基于北斗和低空遙感數據的協同感知網絡構建方法,其特征在于,所述將關鍵幀相似度超過閾值的兩個低空遙感數據作為相鄰的低空遙感數據包括:
8.基于北斗和低空遙感數據的協同感知網絡構建系統,其特征在于,包括:
9.一種電子設備,其特征在于,包括:芯片、處理器和存儲器,所述存儲器用于存儲計算機程序代碼,所述計算機程序代碼包括計算機指令,在所述芯片執行所述計算機指令的情況下,所述電子設備執行如權利要求1至7中任一項所述的基于北斗和低空遙感數據的協同感知網絡構建方法。
10.一種計算機可讀存儲介質,其特征在于,所述計算機可讀存儲介質中存儲有計算機程序,所述計算機程序包括程序指令,所述程序指令在被電子設備的處理器執行的情況下,使所述處理器執行權利要求1至7中任一項所述的基于北斗和低空遙感數據的協同感知網絡構建方法。
技術總結
本發明的目的是提供基于北斗和低空遙感數據的協同感知網絡構建方法,該方法包括:采用多個無人機對同一地點進行拍攝得到多個低空遙感數據;將兩兩之間關鍵幀相似度超過閾值的低空遙感數據作為重疊的低空遙感數據對;將每對重疊的低空遙感數據進行融合得到三維低空遙感數據;獲取北斗定位數據;對所述三維低空遙感數據和北斗定位數據進行協同處理得到精確定位數據。本發明通過北斗定位系統與低空遙感系統進行協同感知,可以精確地獲得待測目標地的三維模型地圖,能夠協助國土資源調查,農業資源調查和城市日常遠程監控和日常巡護。
技術研發人員:吳順民,劉雪璐,李佳馨,胡小丹,王月然
受保護的技術使用者:廣東新禾智慧數字科技有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!