用于自動駕駛場景庫的綜合指標(biāo)計算方法與流程
本發(fā)明涉及自動駕駛。更具體地說,本發(fā)明涉及一種用于自動駕駛場景庫的綜合指標(biāo)計算方法。
背景技術(shù):
1、在自動駕駛技術(shù)的發(fā)展過程中,準(zhǔn)確構(gòu)建場景庫并計算綜合指標(biāo)對于實現(xiàn)安全、高效的自動駕駛至關(guān)重要。
2、目前,自動駕駛車輛的數(shù)據(jù)采集主要依賴多種傳感器,如車載gnss模塊、輪速傳感器和前視攝像頭等。然而,不同傳感器的數(shù)據(jù)存在誤差和不穩(wěn)定性。例如,車載gnss模塊在某些環(huán)境下(如高樓林立的城市峽谷、隧道等)可能會出現(xiàn)定位不準(zhǔn)確的情況,導(dǎo)致三維定位數(shù)據(jù)存在偏差;輪速傳感器獲取的輪速脈沖數(shù)據(jù)可能會受到輪胎磨損、路面狀況等因素的影響,從而產(chǎn)生誤差;前視攝像頭獲取的圖像數(shù)據(jù)可能會受到光照、天氣等條件的干擾,使得圖像質(zhì)量下降,影響后續(xù)的分析和處理。
3、在數(shù)據(jù)融合方面,現(xiàn)有的方法往往難以充分發(fā)揮不同傳感器數(shù)據(jù)的優(yōu)勢,導(dǎo)致融合軌跡數(shù)據(jù)存在缺失或不準(zhǔn)確的情況。當(dāng)融合軌跡數(shù)據(jù)中出現(xiàn)連續(xù)若干幀空值區(qū)域時,如何準(zhǔn)確標(biāo)記并補全這些缺失數(shù)據(jù)是一個亟待解決的問題。傳統(tǒng)的數(shù)據(jù)補全方法可能無法考慮到數(shù)據(jù)的時序特性,導(dǎo)致補全后的軌跡數(shù)據(jù)與實際情況存在較大偏差。
4、對于車道寬度的計算,現(xiàn)有的方法大多采用固定值或簡單的平均值,無法根據(jù)實際行駛情況進行動態(tài)調(diào)整。在實際駕駛中,車道寬度可能會受到道路施工、車輛并道等因素的影響而發(fā)生變化。如果不能及時準(zhǔn)確地計算動態(tài)車道寬度,可能會導(dǎo)致自動駕駛車輛在行駛過程中出現(xiàn)壓線、偏離車道等危險情況。
5、在碰撞風(fēng)險評估方面,現(xiàn)有的指標(biāo)計算方法往往只考慮了單一的因素,如縱向距離或橫向距離,而忽略了道路曲率等其他重要因素。道路曲率的變化會影響車輛的行駛軌跡和速度,從而對碰撞風(fēng)險產(chǎn)生重要影響。因此,如何綜合考慮多種因素,準(zhǔn)確計算動態(tài)碰撞風(fēng)險指標(biāo),是提高自動駕駛安全性的關(guān)鍵。
6、此外,在場景分類方面,現(xiàn)有的方法缺乏對多種指標(biāo)的綜合考慮,導(dǎo)致場景分類不準(zhǔn)確。跟馳場景、變道場景以及交叉路口場景的特征復(fù)雜多樣,僅依靠單一指標(biāo)很難準(zhǔn)確區(qū)分這些場景。因此,需要一種能夠綜合考慮多種因素的方法,實現(xiàn)對自動駕駛場景的準(zhǔn)確分類。
技術(shù)實現(xiàn)思路
1、本發(fā)明的一個目的是解決至少上述問題,并提供至少后面將說明的優(yōu)點。
2、本發(fā)明通過一系列步驟,包括數(shù)據(jù)獲取、融合、補全、處理以及指標(biāo)計算和場景分類,旨在提高綜合指標(biāo)計算的準(zhǔn)確性和場景分類的可靠性。
3、為了實現(xiàn)根據(jù)本發(fā)明的這些目的和其它優(yōu)點,提供了一種用于自動駕駛場景庫的綜合指標(biāo)計算方法,其特征在于,包括以下步驟:
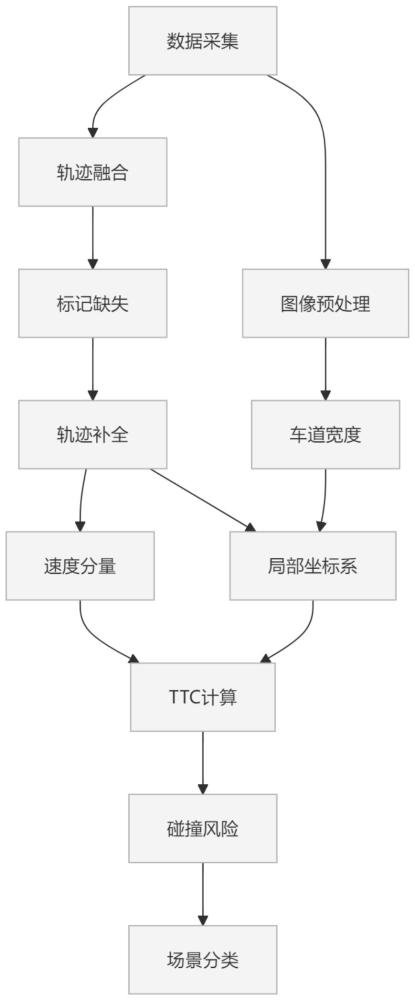
4、s1、通過車載gnss模塊獲取三維定位數(shù)據(jù),通過輪速傳感器獲取輪速脈沖數(shù)據(jù),通過前視攝像頭獲取圖像數(shù)據(jù);
5、s2、將步驟s1的三維定位數(shù)據(jù)與輪速脈沖數(shù)據(jù)輸入擴展卡爾曼濾波器,生成融合軌跡數(shù)據(jù);
6、s3、檢測步驟s2的融合軌跡數(shù)據(jù)中連續(xù)若干幀空值區(qū)域,生成缺失軌跡標(biāo)記數(shù)據(jù);
7、s4、將步驟s2的融合軌跡數(shù)據(jù)與步驟s3的缺失軌跡標(biāo)記數(shù)據(jù)輸入時序卷積網(wǎng)絡(luò)與微型門控循環(huán)單元網(wǎng)絡(luò)級聯(lián)結(jié)構(gòu),輸出補全軌跡數(shù)據(jù);
8、s5、對步驟s1的前視攝像頭的圖像數(shù)據(jù)進行roi區(qū)域裁剪與灰度化處理,生成預(yù)處理圖像數(shù)據(jù);
9、s6、將步驟s5的預(yù)處理圖像數(shù)據(jù)與歷史軌跡數(shù)據(jù)庫及地圖數(shù)據(jù)融合,計算動態(tài)車道寬度數(shù)據(jù),輸出公式為wreal=0.6wcam+0.4whist,其中,wreal表示車道寬度真實值,wcam表示攝像頭所測值,whist表示車道寬度歷史值;
10、s7、基于步驟s4的補全軌跡數(shù)據(jù)與步驟s6的動態(tài)車道寬度數(shù)據(jù),通過frenet標(biāo)架計算生成局部坐標(biāo)系參數(shù);
11、s8、將步驟s4的補全軌跡數(shù)據(jù)投影至步驟s7的局部坐標(biāo)系,分解為縱向速度分量vx與橫向速度分量vy;
12、s9、根據(jù)步驟s8的vx、vy與目標(biāo)物體的相對距離δx、δy,分別計算縱向碰撞時間ttcx=δx/vx與橫向碰撞時間ttcy=δy/vy;
13、s10、融合步驟s9的ttcx、ttcy及地圖提取的道路曲率κ,通過公式生成動態(tài)碰撞風(fēng)險指標(biāo),其中α(κ)+β(κ)=1且α(κ)=0.95-0.5κ,其中,α(κ)和β(κ)表示與道路曲率κ相關(guān)的權(quán)重系數(shù);
14、s11、將步驟s10的drc指標(biāo)與橫向速度分量的方差基于預(yù)設(shè)的閾值判斷,輸出跟馳場景、變道場景以及交叉路口場景的分類標(biāo)簽。
15、優(yōu)選的是,所述時序卷積網(wǎng)絡(luò)的構(gòu)建方法包括:
16、s401、配置三級級聯(lián)的空洞卷積模塊,第一級空洞卷積模塊、第二級空洞卷積模塊、第三級空洞卷積模塊的空洞率分別設(shè)置為1、2、4,為每個空洞卷積模塊預(yù)設(shè)64個尺寸為3×3的卷積核,設(shè)置卷積滑動步長為1,采用時間維度對稱填充方式維持特征圖尺寸;
17、s402、將前置神經(jīng)網(wǎng)絡(luò)輸出的特征圖輸入第一級空洞卷積模塊,生成初級特征圖,將初級特征圖輸入第二級空洞卷積模塊,生成中級特征圖,將中級特征圖輸入第三級空洞卷積模塊,生成高級特征圖;
18、s403、對第一級空洞卷積模塊、第二級空洞卷積模塊以及第三級空洞卷積模塊的64個卷積核進行分組處理,將每級空洞卷積模塊的64個卷積核拆分為4組,每組包含16個卷積核,并共享組內(nèi)參數(shù);
19、s404、對分組后的所述64個卷積核進行結(jié)構(gòu)化剪枝,通過l1范數(shù)分析保留每級模塊中前50%的高激活卷積核,并將剩余50%的卷積核置零;
20、s405、將剪枝后的第三級空洞卷積模塊輸出的高級特征圖通過1×1卷積進行通道壓縮,生成壓縮后的高級特征圖;
21、s406、將壓縮后的高級特征圖與微型門控循環(huán)單元網(wǎng)絡(luò)的輸入特征圖通過張量相加操作進行特征融合,生成殘差連接特征圖;
22、s407、對每個空洞卷積模塊的輸出特征圖應(yīng)用帶泄漏修正的線性單元激活函數(shù),其中所述帶泄漏修正的線性單元的泄漏因子設(shè)置為0.01;
23、s408、將殘差連接特征圖輸出至微型門控循環(huán)單元網(wǎng)絡(luò),輸出補全軌跡數(shù)據(jù)。
24、優(yōu)選的是,所述微型門控循環(huán)單元網(wǎng)絡(luò)的配置方法包括:
25、s409、構(gòu)建微型門控循環(huán)單元網(wǎng)絡(luò),其隱藏層采用16節(jié)點拓?fù)浣Y(jié)構(gòu),門控單元權(quán)重初始化遵循xavier正態(tài)分布;
26、s410、對網(wǎng)絡(luò)的32位浮點權(quán)重wfloat32執(zhí)行8位整型量化,轉(zhuǎn)換為8位整型權(quán)重wint8,每1000次訓(xùn)練迭代重新計算量化參數(shù)μ和σ,μ和σ分別為wfloat32的均值和標(biāo)準(zhǔn)差;
27、s411、通過逆變換對wint8進行反量化重建,得到反量化后的浮點權(quán)重wdequant,
28、;
29、s412、在反向傳播階段采用直通估計器(ste)近似梯度,保持四舍五入操作的梯度為1。
30、優(yōu)選的是,基于道路曲率計算α(κ)和β(κ)的方法包括:
31、s1001、獲取道路曲率κ;
32、s1002、判斷κ的范圍:
33、若,根據(jù)公式計算α(κ),再根據(jù)計算β(κ);
34、若,強制設(shè)定α(κ)=0.4±0.02,以及β(κ)=0.6,修正系數(shù)0.02通過卡爾曼濾波殘差方差動態(tài)調(diào)整。
35、優(yōu)選的是,步驟s6中所述動態(tài)車道寬度數(shù)據(jù)中的歷史車道寬度計算采用指數(shù)衰減移動平均算法,衰減因子設(shè)定為0.85;初始?xì)v史車道寬度值取自地圖中對應(yīng)路段的車道寬度標(biāo)稱值;當(dāng)連續(xù)若干幀攝像頭置信度低于預(yù)設(shè)的閾值時,強制將歷史車道寬度重置為地圖基準(zhǔn)值,并激活基于顏色空間分割的車道線重檢測流程。
36、優(yōu)選的是,步驟s7中所述frenet標(biāo)架計算中道路中心線的三次樣條插值控制點間隔根據(jù)實時曲率動態(tài)調(diào)整:當(dāng)實時曲率大于0.1每米時,控制點間隔縮短至2米;當(dāng)實時曲率小于或等于0.1每米時,控制點間隔擴展至10米;所述曲率計算采用中心差分法對道路中心線參數(shù)方程的二階導(dǎo)數(shù)進行求取。
37、優(yōu)選的是,所述擴展卡爾曼濾波器的參數(shù)配置滿足:
38、狀態(tài)向量定義為二維向量x,包含縱向位置s和縱向速度v;
39、過程噪聲協(xié)方差矩陣q配置為對角矩陣diag(0.1,0.05),反映縱向位置和速度的過程噪聲方差;
40、觀測噪聲協(xié)方差矩陣r配置為對角矩陣diag(0.2,0.1),表征縱向位置和速度的測量噪聲強度;
41、狀態(tài)轉(zhuǎn)移矩陣f采用勻速運動學(xué)模型:f=[[1,δt],[0,1]],其中δt=0.1秒為離散化時間步長;
42、觀測矩陣h配置為2×2單位矩陣i,實現(xiàn)狀態(tài)向量的全維觀測。
43、優(yōu)選的是,所述圖像預(yù)處理模塊的roi區(qū)域與處理流程包括:
44、s501、預(yù)設(shè)在前視攝像頭像素坐標(biāo)系中,選定覆蓋車輛前方100米道路檢測范圍的左上角坐標(biāo)至右下角坐標(biāo)的矩形區(qū)域作為roi區(qū)域;
45、s502、獲取輸入圖像,將其從rgb格式轉(zhuǎn)換為yuv420格式,其中色度分量采用4:2:0子采樣模式,生成減少30%色度數(shù)據(jù)量的yuv420格式圖像;
46、s503、對s502中yuv420格式圖像的y分量執(zhí)行網(wǎng)格劃分的clahe算法,設(shè)置8×8像素網(wǎng)格單元,對比度限制閾值為2.0,采用雙線性插值消除網(wǎng)格邊界效應(yīng),生成處理后的y分量;
47、s504、對s502中yuv420格式圖像的u/v分量進行雙邊濾波,設(shè)置空間域標(biāo)準(zhǔn)差σs=1.5像素,顏色域標(biāo)準(zhǔn)差σc=15灰度級,濾波器窗口直徑d=5像素,生成濾波后的u/v分量;
48、s505、將s503生成的處理后的y分量與s504生成的濾波后的u/v分量合并,輸出yuv420格式預(yù)處理圖像數(shù)據(jù);
49、其中,其中,y分量表示亮度分量,u分量表示圖像中的藍(lán)色色度信息與亮度信息的差值,v分量表示圖像中的紅色色度信息與亮度信息的差值。
50、本發(fā)明至少包括以下有益效果:
51、第一、通過對抗網(wǎng)絡(luò)模型補全缺失軌跡,使自動駕駛系統(tǒng)能全面掌握車輛運動狀態(tài),避免決策失誤。多維度碰撞風(fēng)險評估考慮道路曲率等因素,在復(fù)雜路況下能及時預(yù)警并制動。如在高曲率路段,橫向風(fēng)險識別率大幅提升,緊急制動觸發(fā)延遲顯著縮短,有效減少碰撞事故,保障人員安全。
52、第二、基于動態(tài)時間規(guī)整算法識別駕駛模式,準(zhǔn)確提取并分類場景特征,讓自動駕駛系統(tǒng)能快速識別變道、跟馳等場景,理解駕駛意圖,優(yōu)化行駛路徑和速度規(guī)劃,提高行駛的流暢性和舒適性,減少不必要的加減速和變道操作。
53、第三、完善了軌跡數(shù)據(jù)處理機制,降低了速度數(shù)據(jù)噪聲,提升了數(shù)據(jù)精度和可靠性。高質(zhì)量的數(shù)據(jù)為自動駕駛系統(tǒng)的算法訓(xùn)練和模型優(yōu)化提供了堅實基礎(chǔ),增強系統(tǒng)對不同場景的適應(yīng)性和穩(wěn)定性,減少異常數(shù)據(jù)對系統(tǒng)的干擾。
54、第四、場景指標(biāo)可信度評估模型能有效識別低置信數(shù)據(jù)和異常工況,避免系統(tǒng)使用不可靠數(shù)據(jù)進行決策。同時,準(zhǔn)確的風(fēng)險場景標(biāo)記和置信區(qū)間輸出,讓系統(tǒng)能提前做好應(yīng)對準(zhǔn)備,降低誤判和錯誤決策的概率,提高系統(tǒng)運行的穩(wěn)定性和可靠性。
55、第五、解決了行業(yè)內(nèi)關(guān)鍵技術(shù)難題,為自動駕駛場景庫建設(shè)提供了更科學(xué)的指標(biāo)計算方法,促進自動駕駛技術(shù)的研究和創(chuàng)新,加速自動駕駛技術(shù)從理論研究向?qū)嶋H應(yīng)用的轉(zhuǎn)化,推動整個自動駕駛行業(yè)的發(fā)展進程。
56、本發(fā)明的其它優(yōu)點、目標(biāo)和特征將部分通過下面的說明體現(xiàn),部分還將通過對本發(fā)明的研究和實踐而為本領(lǐng)域的技術(shù)人員所理解。
- 還沒有人留言評論。精彩留言會獲得點贊!