一種用于工業元件位姿估計的穩健的點云配準方法
本發明涉及工業元件位姿估計,具體為一種用于工業元件位姿估計的穩健的點云配準方法。
背景技術:
1、隨著激光雷達、kinect等3d傳感器在各行業中的廣泛應用,點云已成為描述三維世界的主要數據格式。并廣泛用于無序抓取、工業檢測、三維重建、自動駕駛、機器人導航、遙感以及地理信息系統等多個領域,在這些應用中,點云配準作為計算機視覺的關鍵技術,旨在將來自不同視角或不同時間的點云數據對齊到統一的坐標系中,為目標識別任務提供準確的數據支持,最終實現對目標的精確識別和定位。
2、目前,大多數傳統方法通過先粗配準后精配準來實現點云配準。最常見的組合方法是sample?consensus?initial?alignment(sac-ia)和iterative?closest?point(icp)。sac-ia通過從源點云中采樣多個點并在目標點云中識別出相似的子集,最后選擇一個點作為對應點。重復此選擇以優化誤差最小的轉換。然而,受到異常值點的影響,尤其是在點云重疊區域較少時,傳統方法很難獲得全局最優解。icp算法通過最小化歐氏距離來實現精細匹配,但它依賴于良好的初始化,否則可能導致局部最優解。
3、然而,受到采集設備、工業場景和目標體積等因素的影響,物體的點云無法通過單一視角獲取完整信息。因此,必須從多個角度采集點云數據。當多視角拍攝物體時,由于相機視角的差異,點云的重疊區域可能減少。對于重疊不足的數據,由于匹配對中的相似特征值相對較少,經典sac-ia方法很難獲得與數據一致的良好解。特別是在處理復雜幾何形狀、細致表面紋理等特性的工業元件時,常常面臨特征提取不足和全局表達能力缺乏的問題,導致配準效率低下,甚至失敗。
4、近年來,基于深度學習的點云配準方法,如pointnet、pointnet++和3dmatch等,已在特定場景中展示了較高的準確性。這些方法通過端到端學習框架或學習描述符來實現點云間的關聯,并在大規模點云數據處理中表現出潛力。然而,深度學習方法在工業元件點云配準中的應用仍面臨諸多挑戰。首先,這些方法通常需要強大的計算平臺和大量的訓練數據,增加了實現的成本和復雜度。其次,深度學習算法在面對具有復雜幾何和細致表面紋理的工業元件時,特別是在數據不足的情況下,往往缺乏足夠的魯棒性和精度。
技術實現思路
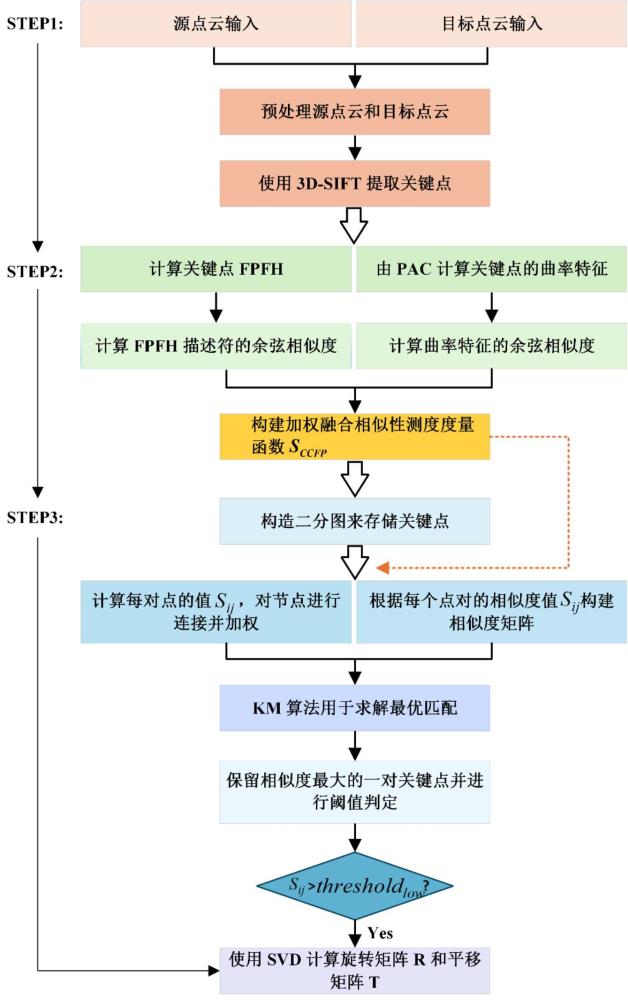
1、為解決上述問題,本發明提供一種用于工業元件位姿估計的穩健的點云配準方法,包括如下步驟:
2、s1、通過3d-sitf特征點提取算法對點云進行關鍵點的提取;
3、s2、采用ccfp加權融合算法和pca主成分分析法提取點云的主曲率,、高斯曲率k以及平均曲率h,通過主曲率,、高斯曲率k以及平均曲率h構建點對的余旋相似度,結合fpfh描述子相似性構建加權相似度度量函數;
4、s3、結合局部特征與全局分布的點云匹配策略,利用二分圖構建相似度矩陣,并通過km算法優化匹配,設定閾值過濾誤匹配,通過svd計算旋轉矩陣r和平移矩陣t,確保匹配結果在全局分布與局部特征上的一致。
5、在優選實施例中,所述步驟s1中的3d-sitf特征點提取算法為:通過尺度空間,建立點云體素金字塔,三維尺度空間中的函數由高斯核函數與三維圖像的卷積得到:
6、;
7、其中,表示原始點云數據經過尺度參數的高斯核平滑后的結果,是高斯核的標準差,為點云中某一點的坐標,是歸一化系數,為高斯衰減項。
8、在優選實施例中,所述步驟s2中,設為目標點a和其鄰域點的距離,基于鄰域點的spfh對目標點a最終的直方圖進行加權,得到加權結果:
9、;
10、其中,為點a的局部幾何特征,為點a鄰域點幾何特征;
11、其中,維特征直方圖為,每個表示該點鄰域內的加權頻率分布,對第i個描述子向量進行歸一化,得到歸一化后描述子向量:
12、;
13、對于源點云p所提取的關鍵點云m中的任意點,對于目標點云q所提取的關鍵點云n中的任意點的fpfh特征描述子向量和,計算余旋相似性:
14、。
15、在優選實施例中,采用pca計算點云的法向量,得到點云的曲率;
16、在法向量估計過程中,計算鄰域的協方差矩陣:
17、;
18、其中,為鄰域點,為點的鄰域質心,為點的鄰域;
19、對協方差矩陣進行特征值分解,得到特征值和特征向量:
20、;
21、其中,為特征值,為對應的特征向量。
22、在優選實施例中,主曲率通過下述公式計算得到:
23、;
24、其中,和分別是最大和最小主曲率;最小的特征值對應于法向量方向,最大的特征值對應于法向量垂直方向的曲率方向;
25、點云中每個點的高斯曲率和平均曲率由主曲率計算得:
26、。
27、在優選實施例中,點對的曲率特征相似度表示為:
28、;
29、其中,表示向量和向量在在第k維的分量和的乘積;
30、通過曲率特征余旋相似度和fpfh描述子相似度,構建加權相似度度量函數:
31、;
32、其中為權重系數。
33、在優選實施例中,所述步驟s3中,在配準過程中,通過構建二分圖,將源點云p中的關鍵點云m和目標點云q中的關鍵點云n的所有點分別放置二分圖的兩端,每一對點和通過計算ccfp加權相似度,來連接點和,并為邊分配權重,構建一個大小為m×n的相似度矩陣,其中m是關鍵點云m的點數,n是關鍵點云n的點數,矩陣的每個元素為每對點對的值;
34、使用km算法在相似度矩陣中找到最優匹配的點對集合,得到一組最優的匹配點對,對于相似度矩陣中的第i行,僅保留對應最大相似度位置列,為相似度最大的點對組合設定最低閾值,將該點對的值與值進行比較,如果值低于,則放棄對應的點對,僅保留大于該最低閾值的點對。
35、在優選實施例中,對于篩選后的點對集合,利用svd進行求解公式如下:
36、;
37、其中,代表關鍵點質量中心,代表關鍵點云中心;矩陣,其中為正交矩陣,為對角矩陣;
38、則旋轉矩陣r為,平移矩陣t為。
39、相比與現有技術,本發明具有如下有益技術效果:
40、(1)引入3dscale?invariant?feature?transform?(3d-sift)算法提取具有旋轉不變性的關鍵點,以提升點云數據處理效率和特征表達能力。
41、(2)提出ccfp加權融合方法,結合點云的幾何曲率特征與局部描述子fpfh特征,構建了穩健的相似度度量函數,有效提高了點云局部特征表達能力。
42、(3)提出一種結合局部特征與全局分布的點云匹配策略,通過構建源點云與目標點云的二分圖,并利用kuhn-munkres(km)算法實現全局最優匹配,解決了誤匹配問題。
技術特征:
1.一種用于工業元件位姿估計的穩健的點云配準方法,其特征在于,包括如下步驟:
2.根據權利要求1所述的用于工業元件位姿估計的穩健的點云配準方法,其特征在于,所述步驟s1中的3d-sitf特征點提取算法為:通過尺度空間,建立點云體素金字塔,三維尺度空間中的函數由高斯核函數與三維圖像的卷積得到:
3.根據權利要求2所述的用于工業元件位姿估計的穩健的點云配準方法,其特征在于,所述步驟s2中,設為目標點a和其鄰域點的距離,基于鄰域點的spfh對目標點a最終的直方圖進行加權,得到加權結果:
4.根據權利要求3所述的用于工業元件位姿估計的穩健的點云配準方法,其特征在于,采用pca計算點云的法向量,得到點云的曲率;
5.根據權利要求4所述的用于工業元件位姿估計的穩健的點云配準方法,其特征在于,主曲率通過下述公式計算得到:
6.根據權利要求5所述的用于工業元件位姿估計的穩健的點云配準方法,其特征在于,點對的曲率特征相似度表示為:
7.根據權利要求3所述的用于工業元件位姿估計的穩健的點云配準方法,其特征在于,所述步驟s3中,在配準過程中,通過構建二分圖,將源點云p中的關鍵點云m和目標點云q中的關鍵點云n的所有點分別放置二分圖的兩端,每一對點和通過計算ccfp加權相似度,來連接點和,并為邊分配權重,構建一個大小為m×n的相似度矩陣,其中m是關鍵點云m的點數,n是關鍵點云n的點數,相似度矩陣的每個元素為每對點對的值;
8.根據權利要求7所述的用于工業元件位姿估計的穩健的點云配準方法,其特征在于,對于篩選后的點對集合,利用svd進行求解公式如下:
技術總結
本發明為一種用于工業元件位姿估計的穩健的點云配準方法,涉及工業元件位姿估計技術領域,將點云的幾何曲率特征與局部描述子FPFH特征相結合,構建穩健的相似度度量方法,有效增強了點云局部特征的表達能力,將局部特征與全局分布相結合的點云配準策略,通過構建點云二分圖和相似度矩陣,并采用KM算法實現全局最優匹配,有效降低了誤匹配率,相比于其他基于特征的配準方法,配準精度提升,在多視角條件下,該方法在單一場景、簡單場景和復雜場景中均能有效應對復雜幾何結構和細致表面紋理的工業元件,顯著提高了配準的準確性和魯棒性。
技術研發人員:解斐斐,褚夫政,孫林,韋良銳
受保護的技術使用者:山東科技大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!