一種基于空域交通流量特性的多點定位系統布站優化方法
本發明屬于多點定位,特別涉及一種基于空域交通流量特性的多點定位系統布站優化方法。
背景技術:
1、隨著國際民航運輸業的快速發展,飛機數量和航班架次的增加,對空中交通的監視和管理需求不斷提升。傳統雷達監視系統在面對復雜地形和空域環境時,覆蓋范圍有限且監視效果不足。為解決這一問題,國際民航領域引入了基于目標信號到達時間差(tdoa)的多點定位系統(mlat)。該系統通過多個地面基站接收同一目標的信號并計算到達時間差而對目標進行精確定位。
2、根據其應用范圍的不同,多點定位系統可分為場面多點定位系統(asm)和廣域多點定位系統(wam),分別用于機場場面和航路目標的監視。這些系統不僅彌補了傳統雷達監視系統覆蓋范圍有限的不足,還能夠解決廣播式自動相關監視(ads-b)系統在定位失效時的缺陷。由于其具備目標識別簡單、兼容性強、刷新率高、監視精度高、覆蓋范圍廣和抗干擾性強等優點,多點定位系統在全球范圍內得到了廣泛應用。
3、在我國,場面多點定位系統已經在多個中大型機場得到了應用,但廣域多點定位系統的應用還相對較少。隨著航空運輸量的增長,現有監視技術暴露出覆蓋不足的問題。同時,空域流量密度分布不均,不同區域的交通流量和監視需求差異顯著。如果布站過程中忽視這些流量特性,可能導致監視資源分配不均,部分區域監視精度不足或資源浪費。因此,基于空域流量密度特性優化布站,對提高系統定位精度和布站效率至關重要。
技術實現思路
1、為了解決上述問題,本發明的目的在于提供一種基于空域交通流量特性的多點定位系統布站優化方法。
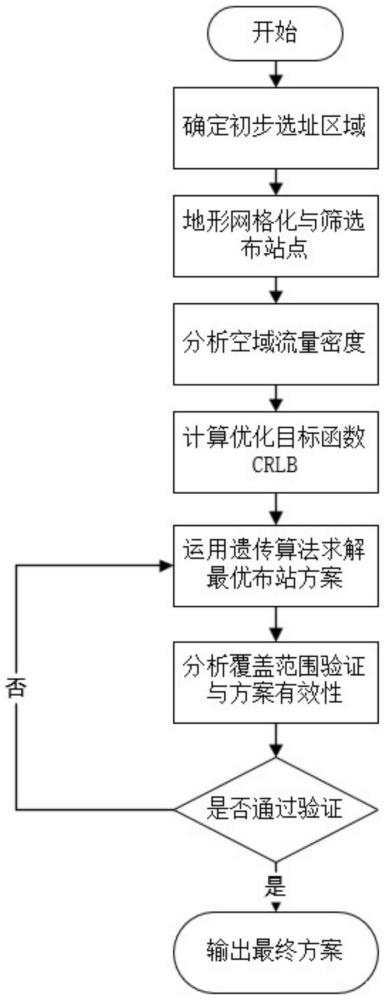
2、為了達到上述目的,本發明提供的基于空域交通流量特性的多點定位系統布站優化方法包括按順序進行的下列步驟:
3、步驟1:以空域內的各定位點作為參考點,以多點定位系統中地面基站天線的實際輻射作用距離作為視距,分別對各個方位角進行可視性分析,得到空域內各定位點對應的可視區域;
4、步驟2:計算空域內所有定位點的可視區域交集,并取所有定位點的可視區域交集作為地面基站的初步選址區域;
5、步驟3:將步驟2中獲得的初步選址區域劃分成多個矩形框,然后將每個矩形框劃分成多個網格單元,分析每個網格單元的地形特征和信號覆蓋情況,并根據信號覆蓋分析結果篩選出符合條件的地面基站,剔除不滿足條件的地面基站;
6、步驟4:將空域劃分成若干子區域,然后根據每個子區域的流量特點計算其流量密度并進行歸一化處理而獲得加權系數;
7、步驟5:基于步驟4中獲得的加權系數,計算每個子區域的crlb值(克拉美羅下界),然后對各子區域的crlb值進行加權求和,生成全局加權信息矩陣,并通過求解該矩陣的逆矩陣提取其對角線元素,最終得到全局crlb值,作為優化布站方案的目標函數,旨在最小化crlb值以優化地面基站布局;
8、步驟6:結合步驟3篩選出的符合條件的地面基站,利用遺傳算法對步驟5中獲得的目標函數進行求解,最終獲得多點定位系統的最優布站方案;
9、步驟7:對步驟6中獲得的最優布站方案進行空域中不同高度層的覆蓋范圍計算,得到最終的覆蓋范圍,以驗證最優布站方案的有效性。
10、在步驟1中,所述以空域內的各定位點作為參考點,以多點定位系統中地面基站天線的實際輻射作用距離作為視距,分別對各個方位角進行可視性分析,得到空域內各定位點對應的可視區域的方法是:
11、以空域內的各定位點作為參考點,對所有定位點的每個方位角進行二維可視性分析,如定位點在某個方位角上存在多個地形遮蔽點,對每個地形遮蔽點進行反向視域分析,計算出該處所需的地面基站天線高度,使其能夠覆蓋定位點;若某一地形遮蔽點對不同定位點所需的地面基站天線高度不同,則取最大值作為該處最終的地面基站天線高度;由于實際地面基站天線高度可能受到限制,若上述計算出的地面基站天線高度超過地面基站天線限制高度,則表明該處不適合作為地面基站而將其剔除;之后判斷剩下的地形遮蔽點位置的可視性,可視性要求不僅能夠滿足視線無遮擋,還需符合地面基站天線的實際作用距離,若兩者均滿足,則認為該地形遮蔽點對定位點可視而將其作為可選地面基站;最后設空域的地面投影為一個圓形區域,以每個定位點在地面的投影作為圓心,以可選地面基站天線的實際輻射作用距離作為半徑繪制圓形,圓形區域內部代表該定位點在空域內的可視區域。
12、在步驟2中,所述計算空域內所有定位點的可視區域交集,并取所有定位點的可視區域交集作為地面基站的初步選址區域的方法是:
13、將步驟1中獲得的所有定位點的可視區域進行疊加,得到各定位點的共同覆蓋區域而作為可視區域交集,并將該可視區域交集作為地面基站的初步選址區域。
14、在步驟3中,所述將步驟2中獲得的初步選址區域劃分成多個矩形框,然后將每個矩形框劃分成多個網格單元,分析每個網格單元的地形特征和信號覆蓋情況,并根據信號覆蓋分析結果篩選出符合條件的地面基站,剔除不滿足條件的地面基站的方法是:
15、首先,將步驟2中獲得的初步選址區域劃分成多個規則的矩形框,矩形框的尺寸應根據實際地形特征和地面基站分布需求確定,確保每個矩形框內的地面基站布局能夠全面覆蓋該區域內作為目標點的飛機;然后根據地面基站的定位容差范圍確定網格單元的邊長,之后將上述矩形框按該邊長進行網格單元劃分,將每個網格單元的中心點作為潛在的地面基站,之后在每個網格單元內,考慮地形因素對信號傳播的影響,計算地面基站天線與定位點之間的遮蔽角;通過計算這些遮蔽角,篩選出那些具有足夠信號可視性的地面基站,確保地面基站的有效覆蓋能力;
16、然后對所有潛在的地面基站進行信號覆蓋性分析,以評估每個潛在的地面基站的信號覆蓋效果,在此基礎上,剔除那些因遮蔽角過大或信號覆蓋不足而不滿足條件的地面基站,保留能夠有效覆蓋目標點的地面基站,以保證定位精度和系統的穩定性。
17、在步驟4中,所述將空域劃分成若干子區域,然后根據每個子區域的流量特點計算其流量密度并進行歸一化處理而獲得加權系數的方法是:
18、首先,將空域劃分成多個子區域,每個子區域定義為一個獨立的空間單元;
19、然后通過計算單位時間內通過該子區域的飛機數量計算出每個子區域i的流量密度ρi,計算公式為:
20、
21、為了統一各子區域之間的流量密度尺度,對所有子區域的流量密度進行歸一化處理,目的是將不同子區域的流量密度轉換為可比的權重系數ωi,計算方式為:
22、
23、其中,為所有子區域流量密度總和。
24、在步驟5中,所述基于步驟4中獲得的加權系數,計算每個子區域的crlb值(克拉美羅下界),然后對各子區域的crlb值進行加權求和,生成全局加權信息矩陣,并通過求解該矩陣的逆矩陣提取其對角線元素,最終得到全局crlb值,作為優化布站方案的目標函數,旨在最小化crlb值以優化地面基站布局的方法是:
25、5.1、對于每個子區域i,首先根據接收站位置和目標點位置確定出目標點到各接收站的距離d1,以量化目標點的定位誤差,計算公式為:
26、
27、其中,x、y、z分別為接收站的三維坐標;x1、y1、z1分別為目標點的三維坐標;
28、5.2、根據上述目標點到各接收站的距離d1,計算tdoa測量值δti,公式為:
29、
30、其中,c為信號傳播速度;
31、5.3、根據上述tdoa測量值δti,建立雅可比矩陣j,以反映目標點位置的幾何敏感性,其形式為:
32、
33、5.4、假設tdoa測量的噪聲服從均值為零的高斯分布,噪聲的協方差矩陣為:其中為第i個接收站的tdoa測量方差;
34、5.5、根據上述雅可比矩陣j和噪聲的協方差矩陣r,計算出目標點位置誤差的協方差矩陣∑x,公式為:∑x=(jtr-1j)-1,其中,jt為雅可比矩陣的轉置,r-1為噪聲的協方差矩陣的逆;
35、5.6、根據上述目標點位置誤差的協方差矩陣σx,計算出第i個子區域的信息矩陣ii,公式為:其為該子區域內目標點位置誤差的協方差矩陣∑x的逆矩陣,用于表征該子區域對目標點定位精度的貢獻;
36、5.7、基于上述第i個子區域的信息矩陣ii和步驟4中獲得的加權系數ωi,得到全局加權信息矩陣iglobal,公式為:
37、5.8、對上述全局加權信息矩陣iglobal進行求逆,得到全局crlb值,公式為:全局crlb值為全局加權信息矩陣的逆矩陣的對角線元素,表示全空域的定位精度下界,并將其作為優化布站方案的目標函數。
38、在步驟6中,所述結合步驟3篩選出的符合條件的地面基站,利用遺傳算法對步驟5中獲得的目標函數進行求解,最終獲得多點定位系統的最優布站方案的方法是:
39、6.1、在步驟3中得到初步篩選的布站點后,隨機生成初始種群,每個個體代表一個布站方案;每個布站方案由多個地面基站的位置組成,并且均需滿足以下約束條件:
40、(1)地面基站之間的最小距離必須滿足預設的安全距離要求,以避免地面基站過于密集,確保合理的信號覆蓋;
41、(2)每個地面基站的位置必須能夠覆蓋預定區域,確保空域內關鍵區域的全覆蓋;
42、(3)所有地面基站的位置必須嚴格位于選定的布站范圍內,避免超出規定區域布站;
43、6.2、將每個布站方案編碼為一組基站位置坐標(x,y,z),每個地面基站的位置在選定的空域范圍內隨機分布,確保所生成的布站方案可用于后續的適應度評估;
44、6.3、對于種群中的每一個布站方案,計算空域內各個子區域的crlb值,crlb值反映了定位精度,數值越低表示定位精度越高;
45、6.4、將各子區域的crlb值按照加權系數ωi加權求和,得到整個空域的全局crlb值并將其用作該布站方案的適應度值,適應度值越小表示該布站方案越優;
46、6.5、基于適應度值,使用輪盤賭選擇算法從當前種群中選出表現較好的布站方案進入下一代;適應度較大的個體將有更高的概率被選擇,適應度較小的個體將被淘汰,這一機制有助于保留適應度較高的個體,推動種群向更優解進化;
47、6.6、將種群中適應度最優的若干個體直接保留到下一代,確保最優解不會在進化過程中丟失,這樣做是為了避免局部最優解的喪失,保證全局最優解的穩定性;
48、6.7、采用多點交叉操作生成新的地面基站位置組合,交叉操作在選中的父代個體之間執行;通過交叉操作,子代個體繼承父代的部分特性,從而生成新的布站方案,并增加布站方案的多樣性,進一步改善布站質量;
49、6.8、為防止算法陷入局部最優解,設置變異概率pm,對種群中的部分個體進行隨機變異操作;變異操作通過隨機選擇某個基站的位置重新生成,以增加種群的多樣性,從而提高搜索全局最優解的能力;
50、6.9、判斷是否達到最大迭代次數;如果達到最大迭代次數,則終止算法并輸出當前最優解;如果未達到最大迭代次數,則返回步驟6.5,根據適應度值選擇下一代種群,繼續執行遺傳算法的迭代過程;
51、6.10、在達到最大迭代次數后,輸出最終的最優布站方案,并記錄對應的空域的全局crlb值,用于實際部署和優化多點定位系統的性能。
52、在步驟7中,所述對步驟6中獲得的最優布站方案進行空域中不同高度層的覆蓋范圍計算,得到最終的覆蓋范圍,以驗證最優布站方案的有效性的方法是:
53、7.1、選定需要分析的空域中的不同高度層hr,這些高度層將用于評估不同地面基站在該高度層的覆蓋效果;
54、7.2、以最優布站方案中每個地面基站作為中心,在0°至360°的范圍內將每5°劃分為一個方位角θi,其θ中i(i=1,2,...72),用于計算特定方位上的遮蔽角和視在距離;
55、7.3、對于每個方位角θi,根據下式計算出由于地形或障礙物導致的遮蔽角其中,ha表示地面基站天線的海拔高度,ho表示方位角θi上地形遮蔽點的海拔高度,ds表示地形遮蔽點到地面基站天線的斜距,re表示等效地球半徑;遮蔽角αi用于判斷當前方位角的最低可視仰角;
56、7.4、基于上述遮蔽角αi計算出每個方位角θi的視在距離然后將每個方位角θi的視在距離dv,i投影到水平面上,形成當前方位角的可視范圍;
57、7.5、將每個高度層hl的所有方位角θi的視在距離dv,i均投影到水平面上,然后連接所有方位角的可視范圍邊界,得到地面基站天線在當前高度層上的完整覆蓋范圍;
58、7.6、對每個選定的高度層hl重復上述步驟,得到地面基站在各高度層上的覆蓋范圍,通過比較覆蓋范圍,驗證最優布站方案在不同高度層的有效性。
59、本發明與現有技術相比,其顯著優點在于:
60、(1)本發明通過結合空域流量密度特性和實際地形條件,有效縮小了選址區域范圍,避免了傳統方法中對所有可能地面基站進行覆蓋分析所帶來的計算量大和實施難度高的問題。
61、(2)本發明方法能夠動態適應空域流量變化,確保系統資源的高效配置和空域覆蓋的穩定性,有效提升了系統的整體定位精度和覆蓋有效性。
- 還沒有人留言評論。精彩留言會獲得點贊!