基于高階全驅的燃料電池進氣系統控制方法
本發明涉及燃料電池,特別是涉及一種基于高階全驅的燃料電池進氣系統控制方法。
背景技術:
1、質子交換膜燃料電池(proton?exchange?membrane?fuel?cell,簡稱pem?fc)是氫能高效應用的關鍵設備,因其具有清潔、高效、壽命長和低噪音等優點,被普遍視為新能源汽車發展的終極目標。對于用于汽車的大功率pemf?c,進氣系統的控制效果對于pemfc輸出功率和延長其壽命起著至關重要的作用。pemfc的動態性能與陰極供氣密切相關,如供氣不足或者陰陽極壓差過大會損害質子交換膜,降低其使用壽命。同時,質子交換膜燃料電池進氣系統是一個多輸入多輸出、強非線性強耦合、系統內存在未建模動態、系統外存在未知變量干擾的復雜動態系統,因此需對陰極供氣流量和陰極壓力進行精確解耦控制,避免影響燃料電池高效穩定運行。目前已經成熟的控制方法大多基于一階狀態空間方程,但針對高度非線性系統存在一定局限性。
技術實現思路
1、本發明的目的在于提供一種基于高階全驅的燃料電池進氣系統控制方法,采用全驅最優控制框架設計控制律,系統的非線性項抵消,得到線性定常閉環系統,實現對進氣系統關鍵變量的解耦控制。
2、一種基于高階全驅的燃料電池進氣系統控制方法,其包括:
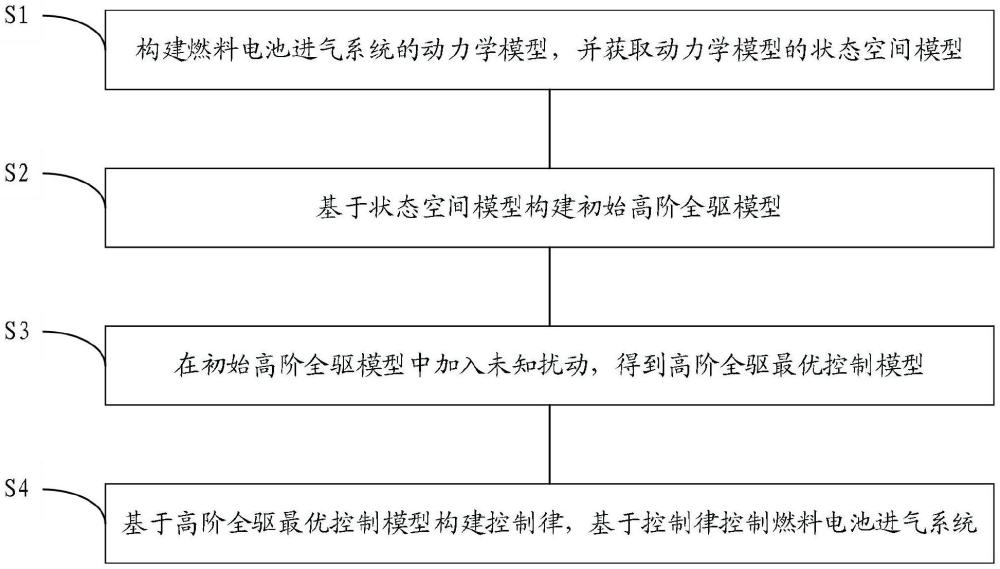
3、構建燃料電池進氣系統的動力學模型,并獲取所述動力學模型的狀態空間模型;表達式為:
4、
5、式中:x1=ωcp,為燃料電池進氣系統中空氣壓縮機的電機角速度,x2=psm,為燃料電池進氣系統中陰極進氣歧管的空氣壓力,x3=pca,為燃料電池進氣系統中電堆陰極壓力,x4=θ,為燃料電池進氣系統中節氣門的開度,ξ為已知電流擾動,h(x1,x2)=wcp,為空氣壓縮機出口空氣的質量流量,u1為空氣壓縮機電壓,u2=θ*,為節氣門的開度指令,·為求導,b1為第一狀態參數,b2為第二狀態參數,b3為第三狀態參數,b4為第四狀態參數,b5為第五狀態參數,b6為第六狀態參數,b7為第七狀態參數,b8為第八狀態參數,b9為第九狀態參數,b10為第十狀態參數,b11為第十一狀態參數,b12為第十二狀態參數;
6、基于所述狀態空間模型構建初始高階全驅模型;表達式為:
7、
8、式中:t為轉置,x為狀態向量,x=[x1,x2,x3,x4],l12=0,l21=0,
9、在所述初始高階全驅模型中加入未知擾動,得到高階全驅最優控制模型;表達式為:
10、
11、式中:為第一未知擾動,為第二未知擾動,0~1表示0階導數和1階導;
12、基于所述高階全驅最優控制模型構建控制律,基于所述控制律控制燃料電池進氣系統。
13、可選地,所述動力學模型的表達式為:
14、
15、式中:jcp為電機轉動慣量,t為時間,τcm為電機驅動力矩,τcp為空氣壓縮機的負載力矩,r為空氣的氣體常數,tcp為管道內部氣體溫度,vsm為供氣管道的體積,ma為氣體的摩爾質量,wsm為供氣管道質量流量,tfc為電堆溫度,vca為電堆陰極體積,wca,out為陰極出口流量,為氧氣的摩爾質量,為參與反應的氧氣流量,ttr為閥的響應時間常數。
16、可選地,b12=ttr,ηcm、kt、kv和rcm為電機常數,cp為氣體比熱容,tatm為大氣溫度,ηcp為空氣壓縮機最大效率,γ為空氣比率,ra為空氣氣體常數,ksm為工期管道出口流道系數,tst為電堆溫度,ncell為串聯的電池個數,f為法拉第常數,cd,tr為節流閥排出系數,at,tr為最大節流面積。
17、可選地,在所述初始高階全驅模型中加入未知擾動,得到高階全驅最優控制模型,具體為:
18、構建擴張狀態觀測器;表達式為:
19、
20、式中:φ1,j為第一擴張狀態參數,φ2,j為第二擴張狀態參數,φ3,j為第三擴張狀態參數,j=[1,2];為φ1,j的觀測值,為φ2,j的觀測值,為φ3,j的觀測值,β1,j為第一觀測器增益向量,β2,j為第二觀測器增益向量,β3,j為第三觀測器增益向量;
21、將y1=x2輸入到所述擴張狀態觀測器,得到將y2=x3輸入到所述擴張狀態觀測器,得到
22、在所述初始高階全驅模型中加入和得到所述高階全驅最優控制模型。
23、可選地,基于所述高階全驅最優控制模型構建控制律,基于所述控制律控制燃料電池進氣系統,包括:
24、令i∈{2,3};為理想狀態變量;
25、將所述高階全驅最優控制模型轉換為線性狀態,得到線性模型;表達式為:
26、
27、式中:ae為第一參數矩陣,be為第二參數矩陣;
28、令
29、
30、構建目標函數;表達式為:
31、
32、式中:j為目標函數,為半正定矩陣,為正定矩陣,目標函數j旨在使狀態變量的變化率最小;
33、基于所述目標函數進行黎卡提代數方程求得,得到唯一正定解;
34、基于所述唯一正定解構建控制律,基于所述控制律控制燃料電池進氣系統。
35、可選地,所述控制律表達式為:
36、
37、式中:u為控制器輸出,p為唯一正定解,t為時間,f(x(0~1))=f(z(0~1),t),為集總擾動,分別代表和
38、可選地,
39、本發明的效果如下:
40、本發明基于高階全驅的燃料電池進氣系統控制方法,對燃料電池進氣系統的解耦控制問題設計了一種基于高階全驅系統方法結合擴張狀態觀測器的最優控制器,方法過程簡單易懂、魯棒性強。使用擴張狀態觀測器觀測系統的參數不確定性以及外界干擾形成的集總擾動,不需要外界干擾的先驗信息,能夠有效克服控制模型和拓撲模型之間的未建模動態;采用高階全驅方法,與傳統控制方法相比,不再基于狀態空間模型進行分析和設計,模型處理過程簡單;控制器的結構設計簡單有效,結合最優控制參數化設計方法,參數求解過程簡單明了且具有良好的數值穩定性,并可提供充足的設計自由度,得到滿足系統期望性能指標的控制器參數。
技術特征:
1.一種基于高階全驅的燃料電池進氣系統控制方法,其特征在于,其包括:
2.根據權利要求1所述的基于高階全驅的燃料電池進氣系統控制方法,其特征在于,所述動力學模型的表達式為:
3.根據權利要求1所述的基于高階全驅的燃料電池進氣系統控制方法,其特征在于,b3=tatm,b12=ttr,ηcm、kt、kv和rcm為電機常數,cp為氣體比熱容,tatm為大氣溫度,ηcp為空氣壓縮機最大效率,γ為空氣比率,ra為空氣氣體常數,ksm為工期管道出口流道系數,tst為電堆溫度,ncell為串聯的電池個數,f為法拉第常數,cd,tr為節流閥排出系數,at,tr為最大節流面積。
4.根據權利要求1所述的基于高階全驅的燃料電池進氣系統控制方法,其特征在于,在所述初始高階全驅模型中加入未知擾動,得到高階全驅最優控制模型,具體為:
5.根據權利要求4所述的基于高階全驅的燃料電池進氣系統控制方法,其特征在于,基于所述高階全驅最優控制模型構建控制律,基于所述控制律控制燃料電池進氣系統,包括:
6.根據權利要求5所述的基于高階全驅的燃料電池進氣系統控制方法,其特征在于,所述控制律表達式為:
7.根據權利要求5所述的基于高階全驅的燃料電池進氣系統控制方法,其特征在于,
技術總結
本發明提供一種基于高階全驅的燃料電池進氣系統控制方法,涉及燃料電池技術領域,其包括:構建燃料電池進氣系統的動力學模型,并獲取動力學模型的狀態空間模型;基于狀態空間模型構建初始高階全驅模型;在初始高階全驅模型中加入未知擾動,得到高階全驅最優控制模型;基于高階全驅最優控制模型構建控制律,基于控制律控制燃料電池進氣系統。本發明采用全驅最優控制框架設計控制律,系統的非線性項抵消,得到線性定常閉環系統,實現對進氣系統關鍵變量的解耦控制。
技術研發人員:張亞輝,劉艷玲,田陽,文桂林
受保護的技術使用者:燕山大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!