變電設備的巡檢方法、裝置、存儲介質及電子設備與流程
本申請涉及變電站檢測領域,具體而言,涉及一種變電設備的巡檢方法、裝置、存儲介質及電子設備。
背景技術:
1、由于用電需求發生變化,尤其表現為對電網輸送電力的穩定性等質量要求提高,使得電網的可靠性要求也相應的提高。電網中包括變電站等基礎設置。變電站中包括多種變電設備。檢修人員對管轄的變電站進行檢修時,所管轄變電站數量多、設備型號廣、運行狀態復雜;并且管轄的變電站中還存在大量的特級保障站,變電設備運行時的狀態管控面臨嚴峻挑戰。面對高標準的設備運行和監測要求,變電站內部存在著在線監測設備可靠性不足、人工巡視存在人站比壓力大等問題。
2、變電站依托機器人等設備替代部分運維人員的變電站運維工作,但傳統的巡視機器人在預定路線上定時定點進行巡視,采集的數據種類較少,不能全面的記錄變電站的變電設備運行情況;電力巡視機器人進行巡檢時的靈活性較差,采集數據任務有時會有多種干擾情況,任務完成度不高,存在巡檢效率不理想的問題。
3、針對上述的問題,目前尚未提出有效的解決方案。
技術實現思路
1、本申請實施例提供了一種變電設備的巡檢方法、裝置、存儲介質及電子設備,以至少解決相關技術中存在變電設備巡檢效率不理想的技術問題。
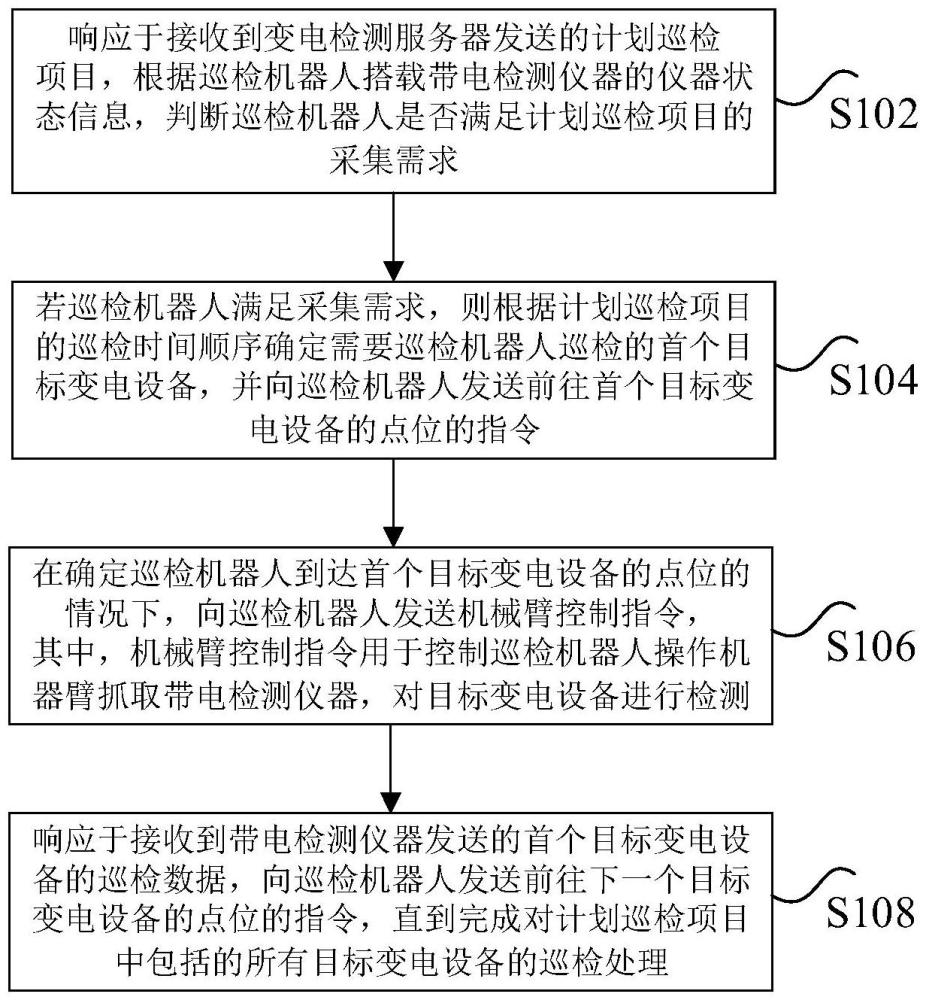
2、根據本申請實施例的一個方面,提供了一種變電設備的巡檢方法,包括:響應于接收到變電檢測服務器發送的計劃巡檢項目,根據巡檢機器人搭載帶電檢測儀器的儀器狀態信息,判斷巡檢機器人是否滿足計劃巡檢項目的采集需求;若巡檢機器人滿足采集需求,則根據計劃巡檢項目的巡檢時間順序確定需要巡檢機器人巡檢的首個目標變電設備,并向巡檢機器人發送前往首個目標變電設備的點位的指令;在確定巡檢機器人到達首個目標變電設備的點位的情況下,向巡檢機器人發送機械臂控制指令,其中,機械臂控制指令用于控制巡檢機器人操作機器臂抓取帶電檢測儀器,對目標變電設備進行檢測;響應于接收到帶電檢測儀器發送的首個目標變電設備的巡檢數據,向巡檢機器人發送前往下一個目標變電設備的點位的指令,直到完成對計劃巡檢項目中包括的所有目標變電設備的巡檢處理。
3、可選地,該方法還包括:獲取帶電檢測儀器的儀器狀態信息,其中,儀器狀態信息包括帶電檢測儀器的剩余電量,連接狀態,以及工作狀態;根據剩余電量,判斷帶電檢測儀器是否能夠完成巡檢項目;根據連接狀態,判斷帶電檢測儀器與智能移動終端之間的通信是否正常,其中,智能移動終端搭載于巡檢機器人,用于與變電檢測服務器和巡檢機器人分別進行交互;根據工作狀態,判斷帶電檢測儀器是否能夠正常工作;在帶電檢測儀器能夠完成巡檢項目,帶電檢測儀器與巡檢機器人之間的通信正常,并且帶電檢測儀器能夠正常工作的情況下,確定巡檢機器人滿足巡檢數據采集需求。
4、可選地,在向巡檢機器人發送機械臂控制指令之前,該方法還包括:獲取巡檢機器人對首個目標變電設備進行采集的圖像信息;根據圖像信息,判斷當前是否有其他的巡檢機器人在對首個目標變電設備進行巡檢;若存在其他的巡檢機器人處于對首個目標變電設備的巡檢過程中,則向巡檢機器人發送前往下一個目標變電設備的指令。
5、可選地,帶電檢測儀器上設置有壓力傳感器,向巡檢機器人發送機械臂控制指令之后,該方法還包括:在機械臂將帶電檢測儀器放置于在首個目標變電設備表面后,獲取壓力傳感器采集的壓力數據;判斷壓力數據是否滿足對巡檢數據的測量需求;若壓力數據滿足測量需求,則向帶電檢測儀器發送允許執行采集巡檢數據的開啟檢測指令。
6、可選地,該方法還包括:若壓力數據未滿足測量需求,則基于壓力數據,向巡檢機器人發送壓力調整指令,其中,壓力調整指令用于控制機器臂移動使帶電檢測儀器遠離或靠近變電設備;獲取壓力傳感器重新采集的更新數據;直到更新數據滿足測量需求,向帶電檢測儀器發送開啟檢測指令。
7、可選地,該方法還包括:在巡檢機器人執行計劃巡檢項目的過程中,響應于接收到變電檢測服務器發送的臨時巡檢項目,設置臨時巡檢項目的優先級高于計劃巡檢項目的優先級,其中,臨時巡檢項目是變電檢測服務器根據故障檢測需求和故障排除需求生成的;控制巡檢機器人暫停執行計劃巡檢項目,并開始執行臨時巡檢項目。
8、根據本申請實施例的另一方面,提供了一種智能移動終端,智能移動終端應用任意一項的變電設備的巡檢方法。
9、根據本申請實施例的另一方面,提供了一種變電設備的巡檢系統,包括:巡檢機器人,機械臂,帶電檢測儀器,以及智能移動終端,其中,智能移動終端應用權利要求1至6中任意一項的變電設備的巡檢方法,智能移動終端、帶電檢測設備、機械臂搭載于巡檢機器人上,智能移動終端與變電檢測服務器存在交互,變電檢測服務器用于向智能移動終端下發計劃巡檢項目。
10、可選地,智能移動終端用于在巡檢機器人位于地面場景的情況下,采用5g-apn通訊方式與變電檢測服務器進行交互,其中,5g-apn通訊方式是第五代移動通信系統5g中采用接入點名稱apn作為網關的一種通訊方式;智能移動終端用于在巡檢機器人位于地下場景的情況下,采用無線局域網通訊方式與變電檢測服務器進行交互;智能移動終端用于與巡檢機器人采用以太網有線通訊方式進行交互。
11、可選地,帶電檢測儀器中包括以下至少之一:紅外熱像檢測終端、聲紋成像檢測終端、電磁波局部放電檢測終端、超聲波局部放電檢測終端、暫態地電位局部放電檢測終端。
12、在本申請實施例中,采用根據巡檢項目預設的巡檢時間控制多功能巡檢機器人對變電設備進行巡檢方式,通過響應于接收到變電檢測服務器發送的計劃巡檢項目,根據巡檢機器人搭載帶電檢測儀器的儀器狀態信息,判斷巡檢機器人是否滿足計劃巡檢項目的采集需求;若巡檢機器人滿足采集需求,則根據計劃巡檢項目的巡檢時間順序確定需要巡檢機器人巡檢的首個目標變電設備,并向巡檢機器人發送前往首個目標變電設備的點位的指令;在確定巡檢機器人到達首個目標變電設備的點位的情況下,向巡檢機器人發送機械臂控制指令,其中,機械臂控制指令用于控制巡檢機器人操作機器臂抓取帶電檢測儀器,對目標變電設備進行檢測;響應于接收到帶電檢測儀器發送的首個目標變電設備的巡檢數據,向巡檢機器人發送前往下一個目標變電設備的點位的指令,直到完成對計劃巡檢項目中包括的所有目標變電設備的巡檢處理。達到了對變電設備狀態的高效監測,控制巡檢機器人按需前往指定設備進行非接觸式檢測的目的,實現了提高變電設備的巡檢效率的技術效果,進而解決了相關技術中存在變電設備巡檢效率不理想的技術問題。
技術特征:
1.一種變電設備的巡檢方法,其特征在于,包括:
2.根據權利要求1所述的方法,其特征在于,所述方法還包括:
3.根據權利要求1所述的方法,其特征在于,在所述向所述巡檢機器人發送機械臂控制指令之前,所述方法還包括:
4.根據權利要求1所述的方法,其特征在于,所述帶電檢測儀器上設置有壓力傳感器,所述向所述巡檢機器人發送機械臂控制指令之后,所述方法還包括:
5.根據權利要求4所述的方法,其特征在于,所述方法還包括:
6.根據權利要求1至5中任意一項所述的方法,其特征在于,所述方法還包括:
7.一種智能移動終端,其特征在于,所述智能移動終端應用權利要求1至6中任意一項所述的變電設備的巡檢方法。
8.一種變電設備的巡檢系統,其特征在于,包括:巡檢機器人,機械臂,帶電檢測儀器,以及智能移動終端,其中,所述智能移動終端應用權利要求1至6中任意一項所述的變電設備的巡檢方法,所述智能移動終端、所述帶電檢測設備、所述機械臂搭載于所述巡檢機器人上,所述智能移動終端與變電檢測服務器存在交互,所述變電檢測服務器用于向所述智能移動終端下發計劃巡檢項目。
9.根據權利要求8所述的系統,其特征在于,
10.根據權利要求8所述的系統,其特征在于,所述帶電檢測儀器中包括以下至少之一:紅外熱像檢測終端、聲紋成像檢測終端、電磁波局部放電檢測終端、超聲波局部放電檢測終端、暫態地電位局部放電檢測終端。
技術總結
本申請公開了一種變電設備的巡檢方法、裝置、存儲介質及電子設備。其中,該方法包括:響應于接收到計劃巡檢項目,根據巡檢機器人搭載帶電檢測儀器的儀器狀態信息,判斷巡檢機器人是否滿足計劃巡檢項目的采集需求;若巡檢機器人滿足采集需求,則根據巡檢時間順序確定需要巡檢機器人巡檢的首個目標變電設備,并發送前往首個目標變電設備的點位的指令;在確定巡檢機器人到達首個目標變電設備的點位的情況下,發送機械臂控制指令;響應于接收巡檢數據,向巡檢機器人發送前往下一個目標變電設備的點位的指令,直到完成對計劃巡檢項目中包括的所有目標變電設備的巡檢處理。本申請解決了相關技術中存在變電設備巡檢效率不理想的技術問題。
技術研發人員:董翔,韓曉昆,周道,趙壁,秦彬,衣書偉,黃晨雨,季瀾濤
受保護的技術使用者:國網北京市電力公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!