視頻處理方法、裝置、設備及存儲介質與流程
本技術涉及圖像處理,具體涉及一種視頻處理方法、裝置、設備及存儲介質。
背景技術:
1、隨著攝像技術的發展,攝像運用場景逐漸廣泛,并不局限于穩定位置進行拍攝和處理,比如手機、運動相機等設備,在拍攝圖像時,由于在移動等因素會導致視頻抖動,影響視頻觀感,因此,視頻優化處理的要求也按嚴格;其中,視頻優化處理主要是通過將抖動的視頻變換成穩定的視頻,相關技術中,一般基于大量預設的先驗閾值監測視頻中每個圖像幀的抖動狀態,進行視頻優化處理,導致視頻優化處理準確性較低。
技術實現思路
1、本技術提供一種視頻處理方法、裝置、設備及存儲介質,旨在解決背景技術中視頻優化處理準確性較低的問題,提升視頻優化處理準確性。
2、第一方面,本技術提供一種視頻處理方法,包括:
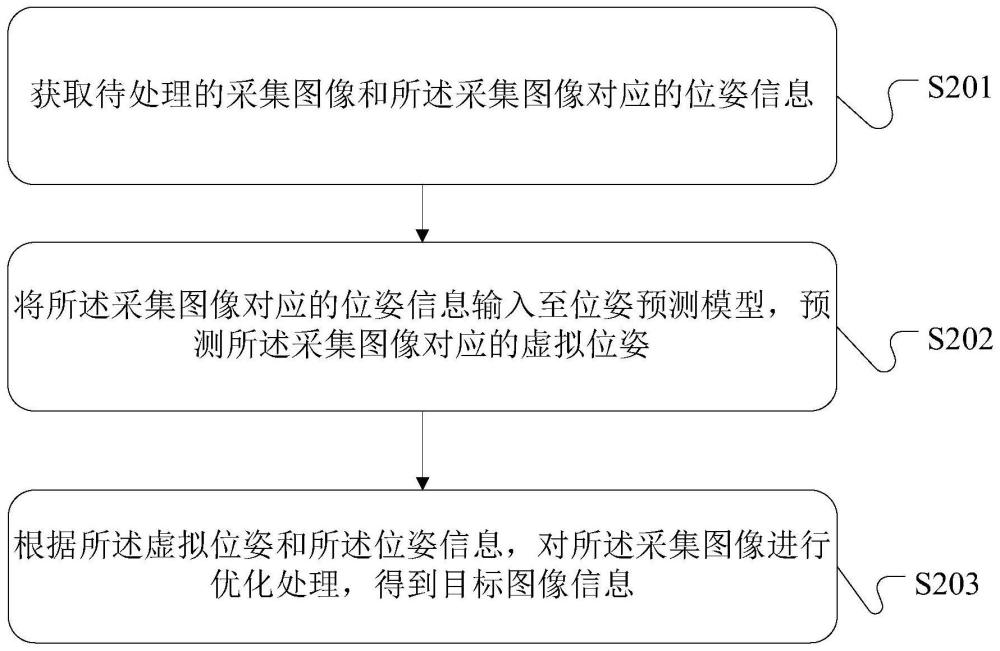
3、獲取待處理的采集圖像和所述采集圖像對應的位姿信息;
4、將所述采集圖像對應的位姿信息輸入至位姿預測模型,預測所述采集圖像對應的虛擬位姿;
5、根據所述虛擬位姿和所述位姿信息,對所述采集圖像進行優化處理,得到目標圖像信息。
6、在本技術一種可能的實現方式中,所述位姿信息包括所述采集圖像采集時的實際位姿,所述實際位姿之前采集的歷史實際位姿,所述實際位姿之后采集的緩存實際位姿,以及所述歷史實際位姿對應的歷史虛擬位姿;
7、所述獲取待處理的采集圖像和所述采集圖像對應的位姿信息,包括:
8、根據所述采集圖像的采集時間,所述采集圖像的采集周期,以及所述預設陀螺儀采集的各陀螺儀數據幀,確定所述實際位姿,以及所述歷史實際位姿;
9、根據所述采集圖像的采集時間,所述采集圖像的采集周期,以及歷史虛擬四元數集,確定歷史虛擬位姿;
10、將所述實際位姿、所述歷史實際位姿、所述緩存實際位姿和所述歷史虛擬位姿設置為位姿信息。
11、在本技術一種可能的實現方式中,所述根據所述采集圖像的采集時間,所述采集圖像的采集周期,以及所述預設陀螺儀采集的各陀螺儀數據幀,確定所述實際位姿,以及所述歷史實際位姿,包括:
12、獲取待處理的采集圖像、所述采集圖像的采集時間和采集周期;
13、根據所述采集時間以及采集周期,確定在所述采集時間之前采集歷史采集圖像的歷史采集時間,以及在所述采集時間之后采集緩存采集圖像的緩存采集時間;
14、根據所述采集圖像的采集時間,從預設陀螺儀采集的各陀螺儀數據幀中提取目標數據幀,并將所述目標數據幀轉換為目標四元數幀,并將所述目標四元數幀設置為實際位姿;
15、根據所述歷史采集時間從各所述陀螺儀數據幀中提取歷史數據幀,并將所述歷史數據幀轉換為歷史四元數幀,將所述歷史四元數幀設置為歷史實際位姿;
16、根據所述緩存采集時間從各所述陀螺儀數據幀中提取緩存數據幀,并將所述緩存數據幀轉換為緩存四元數幀,將所述緩存四元數幀設置為緩存實際位姿。
17、在本技術一種可能的實現方式中,所述將所述實際位姿、所述歷史實際位姿、所述緩存實際位姿和所述歷史虛擬位姿設置為位姿信息之前,包括:
18、若從各所述陀螺儀數據幀中未提取到所述采集時間、所述歷史采集時間以及所述緩存采集時間中任一目標時間點對應的所述目標數據幀,則對與所述目標時間點相距一個采集周期的四數據值進行插值處理,將插值處理的得到的新的四元數幀設置為所述目標時間點對應的四元數幀,所述目標數據幀包括所述實際位姿、所述歷史實際位姿或所述緩存實際位姿中的至少一個;
19、針對每一個所述歷史采集時間,計算所述歷史采集時間對應的歷史四元數幀與所述目標四元素幀之間的相對四元數幀,將所述相對四元數幀更新為所述歷史采集時間對應的歷史四元數幀;
20、針對每一個所述緩存采集時間,計算所述緩存采集時間對應的緩存四元數幀與所述目標四元素幀之間的相對四元數幀,將所述相對四元數幀更新為所述緩存采集時間對應的緩存四元數幀。
21、在本技術一種可能的實現方式中,所述根據所述采集圖像的采集時間,所述采集圖像的采集周期,以及歷史虛擬四元數集,確定歷史虛擬位姿,包括:
22、從所述歷史虛擬四元數集提取時間戳與所述歷史采集時間相同的歷史虛擬四元數幀;
23、針對每一個所述歷史采集時間,若未提取到時間戳與所述歷史采集時間相同的歷史虛擬四元數幀,則根據與所述歷史采集時間相鄰的時間戳對應的歷史虛擬四元數幀,確定所述歷史采集時間對應的歷史虛擬四元數幀;
24、計算各所述歷史采集時間對應的歷史虛擬四元數幀與所述目標四元數幀之間的相對四元數幀,將所述相對四元數幀設置為各所述歷史采集時間對應的歷史虛擬位姿。
25、在本技術一種可能的實現方式中,所述根據所述虛擬位姿和所述實際位姿,對所述采集圖像進行優化處理,得到目標圖像信息,包括:
26、對所述采集圖像進行網格劃分處理,得到多個圖像區域;
27、針對每一個所述圖像區域,根據所述圖像區域中各像素點對應的卷簾時間確定所述圖像區域的采集時間,并根據所述圖像區域的采集時間確定所述圖像區域的區域實際位姿;
28、根據所述區域實際位姿和所述虛擬位姿,計算區域映射信息;
29、根據各所述圖像區域的所述區域映射信息,對所述圖像區域進行映射處理,得到目標圖像信息。
30、在本技術一種可能的實現方式中,所述將所述采集圖像對應的位姿信息輸入至預設的位姿預測模型,預測所述采集圖像對應的虛擬位姿,包括:
31、將所述位姿信息輸入所述位姿預測模型的注意力機制模塊進行加權處理,輸出得到加權后的幀特征信息;
32、將所述幀特征信息輸入所述位姿預測模型中的遞歸神經網絡模塊進行特征提取,輸出特征信息;
33、將所述特征信息輸入所述位姿預測模型中的全連接模塊,預測所述采集圖像對應的虛擬位姿。
34、在本技術一種可能的實現方式中,所述位姿預測模型通過采集樣本采集圖像時的樣本實際位姿,所述樣本實際位姿之前采集的樣本歷史實際位姿,所述樣本實際位姿之后采集的樣本緩存實際位姿,以及所述樣本歷史實際位姿對應的樣本歷史虛擬位姿訓練獲得;
35、所述預設的位姿預測模型訓練的構建步驟,包括:
36、獲取樣本位姿信息,所述樣本位姿信息包括采集樣本采集圖像時的實際位姿樣本,所述樣本實際位姿之前采集的樣本歷史實際位姿,所述樣本實際位姿之后采集的樣本未來實際位姿,以及所述樣本歷史實際位姿對應的樣本歷史虛擬位姿;
37、根據所述樣本位姿信息對初始預測模型進行訓練,獲得訓練預測模型;
38、直至所述訓練預測模型預測的樣本虛擬位姿滿足收斂條件,獲得預設的位姿預測模型。
39、在本技術一種可能的實現方式中,所述根據所述樣本位姿信息對初始預測模型進行訓練,獲得訓練預測模型,包括:
40、根據所述訓練預測模型預測的樣本虛擬位姿、所述樣本采集圖像的采集周期,以及預設的第一損失函數,計算平滑損失參數;
41、根據所述樣本實際位姿,所述樣本虛擬位姿,以及預設的第二損失函數,計算防畸變損失參數;
42、根據預設裁減率、所述樣本虛擬位姿,以及所述樣本采集圖像,計算防越界損失參數和過度裁剪損失參數;
43、根據所述平滑損失參數、所述防畸變損失參數、所述防越界損失參數和過度裁剪損失參數,計算得到總損失參數;
44、根據所述總損失參數對所述初始預測模型進行修正,獲得訓練預測模型。
45、第二方面,本技術提供一種視頻處理裝置,包括:
46、獲取模塊,用于獲取待處理的采集圖像和所述采集圖像對應的位姿信息;
47、預測模塊,用于將所述采集圖像對應的位姿信息輸入至預設的位姿預測模型,預測所述采集圖像對應的虛擬位姿;
48、處理模塊,用于根據所述虛擬位姿和所述位姿信息,對所述采集圖像進行優化處理,得到目標圖像信息。
49、第三方面,本技術提供一種視頻處理設備,所述視頻處理設備包括:
50、一個或多個處理器;
51、存儲器;以及
52、一個或多個應用程序,其中所述一個或多個應用程序被存儲于所述存儲器中,并配置為由所述處理器執行以實現任一項所述的視頻處理方法中的步驟。
53、第四方面,本技術提供一種計算機可讀存儲介質,其上存儲有計算機程序,所述計算機程序被處理器進行加載,以執行任一項所述的視頻處理方法中的步驟。
54、本技術提供一種視頻處理方法、裝置、設備及存儲介質,通過獲取待處理的采集圖像和所述采集圖像對應的位姿信息;將所述采集圖像對應的位姿信息輸入至預設的位姿預測模型,預測所述采集圖像對應的虛擬位姿;并根據所述虛擬位姿和所述位姿信息,對所述采集圖像進行優化處理,得到目標圖像信息。本方案通過預測模型對所述采集圖像對應位姿信息進行分析,預測得到所述實際位姿對應的虛擬位姿,進一步的,根據所述虛擬位姿和所述實際位姿對所述采集圖像進行優化處理,進而得到目標圖像生成視頻,結合采集圖像對應的位姿信息進行采集圖像優化處理,提升視頻優化處理的準確性。
- 還沒有人留言評論。精彩留言會獲得點贊!