一種基于物聯網實驗室的人員動態定位與監控方法與流程
本發明涉及物聯網,具體為一種基于物聯網實驗室的人員動態定位與監控方法。
背景技術:
1、隨著物聯網技術的飛速發展和普及,其在各個領域的應用也日益廣泛。物聯網技術通過傳感器、rfid、藍牙、uwb等多種技術手段,實現了對物理世界的智能化感知、識別、跟蹤、監控和管理。在實驗室管理領域,物聯網技術的應用為實驗室的安全管理、運營效率提升以及科研創新提供了強大的技術支持。
2、實驗室作為科研創新的重要場所,其安全管理和運營效率對于科研工作的順利進行至關重要。傳統的實驗室管理方式往往依賴于人工監控和紙質記錄,不僅效率低下,而且容易出錯。隨著物聯網技術的引入,實驗室管理逐漸實現了智能化和自動化,極大地提高了管理效率和安全性。
3、在當前的實驗室管理中,雖然已經存在一些基于物聯網的技術手段用于人員監控和環境監測,但這些技術仍然存在一定的局限性和不足。具體來說:
4、定位技術:傳統的定位技術如rfid和藍牙低功耗雖然已被廣泛應用于實驗室人員定位,但其定位精度有限,難以滿足高精度實時追蹤的需求。在實驗室復雜環境中,這些技術往往無法準確獲取人員的具體位置信息,導致管理效率低下和安全隱患。
5、視頻監控:實驗室內部通常配備有視頻監控系統,用于監控人員的行為和實驗室的安全狀況。然而,傳統的視頻監控主要依賴于人工監控和分析,不僅效率低下,而且容易漏檢和誤判。同時,缺乏自動化的行為識別算法來準確識別實驗室人員的動作和行為模式,無法為管理人員提供及時有效的決策支持。
6、環境監測:通過物聯網傳感器實時監測實驗室內的環境參數是現有環境監測系統的主要功能之一。然而,這些系統往往只能收集數據,缺乏實時預警和應急響應機制。當實驗室內的環境參數出現異常時,系統無法及時發出預警信號并采取應急措施,從而無法有效保障實驗室的安全和人員的健康。
技術實現思路
1、本發明針對現有技術中存在的技術問題,提供一種基于物聯網實驗室的人員動態定位與監控方法來解決上述實驗室管理中,雖然已經存在一些基于物聯網的技術手段用于人員監控和環境監測,但這些技術仍然存在一定的局限性和不足的問題。
2、本發明解決上述技術問題的技術方案如下:一種基于物聯網實驗室的人員動態定位與監控方法,包括以下步驟:
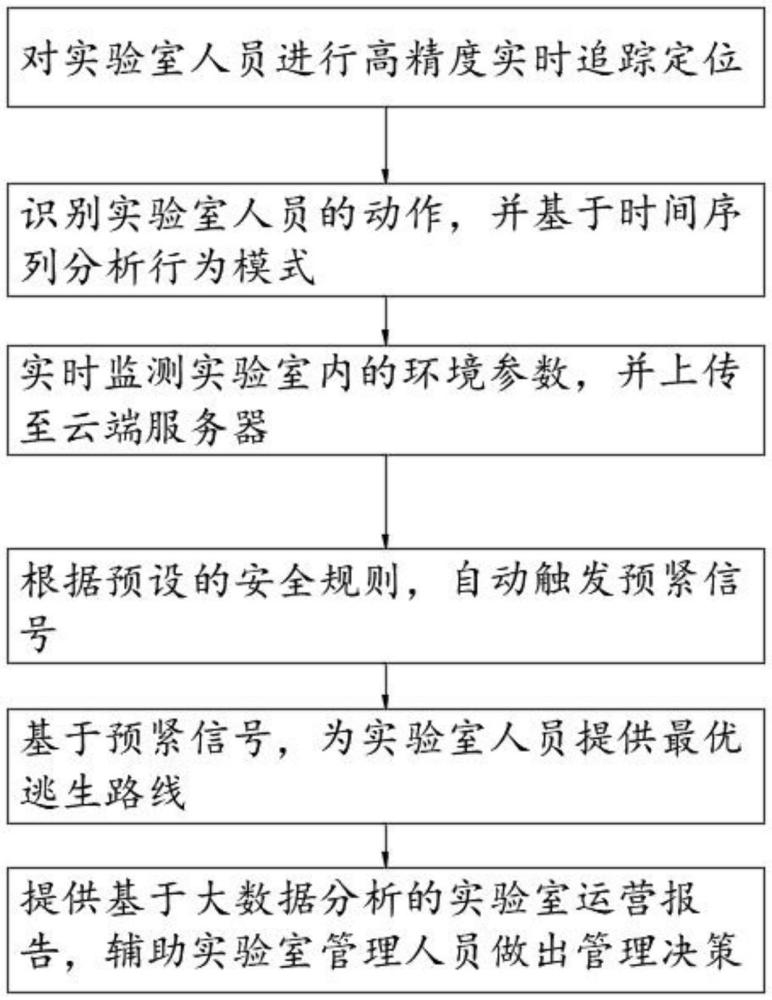
3、采用高精度定位技術,結合實驗室布局圖,對實驗室人員進行高精度實時追蹤定位;
4、利用深度學習算法處理實驗室內部監控的視頻數據,識別實驗室人員的動作,并基于時間序列分析行為模式;
5、實時監測實驗室內的環境參數,并通過物聯網網關統一收集收據,通過邊緣計算初步處理后上傳至云端服務器;
6、根據預設的安全規則,自動觸發預緊信號,并推送至管理人員;
7、基于預緊信號,設計緊急疏散路勁規劃算法;若檢測到緊急情況,則為實驗室人員提供最優逃生路線;
8、提供基于大數據分析的實驗室運營報告,輔助實驗室管理人員做出管理決策,并采用3d可視化技術展示實驗室人員分布、環境狀態以及預警信息。
9、在上述技術方案的基礎上,本發明還可以做如下改進。
10、進一步,所述高精度定位技術包括uwb(超寬帶)、rfid(無線射頻識別)、藍牙低功耗或gps(全球定位系統)中的至少一種,并且結合實驗室內的固定參考點,通過三角測量或指紋定位算法實現實時追蹤定位。
11、進一步,三角測量算法包括:利用至少三個固定參考點(a,b,c)與移動標簽(m)之間的信號傳播時間差(δt_a,δt_b,δt_c)或相位差(φ_a,φ_b,φ_c),結合光速(c)計算距離(d_a,d_b,d_c),進而通過三維空間中的距離交匯公式確定移動標簽的坐標(x,y,z);
12、計算公式如下:
13、
14、其中,(x_a,y_a,z_a),(x_b,y_b,z_b),(x_c,y_c,z_c)分別為固定參考點a,b,c的坐標;
15、進一步,指紋定位算法包括:預先在實驗室內的多個位置點采集無線信號特征,構建信號特征數據庫;
16、定位時,將移動標簽采集到的實時信號特征與指紋庫中的特征進行匹配,通過最近鄰算法、加權k近鄰算法或支持向量機等機器學習算法,確定移動標簽的最可能位置。
17、進一步,所述深度學習算法包括:卷積神經網絡(cnn)、循環神經網絡(rnn)或長短時記憶網絡(lstm);
18、所述卷積神經網絡(cnn)用于視頻幀中的特征提取;
19、所述循環神經網絡(rnn)或長短時記憶網絡(lstm)用于時間序列分析。
20、進一步,所述卷積神經網絡(cnn)用于從視頻幀中提取空間特征,過程包括:
21、卷積神經網絡(cnn)通過多層卷積層、池化層和全連接層,對輸入的視頻幀進行特征提取和分類;
22、卷積層通過卷積核在輸入圖像上滑動,計算局部區域的加權和,并應用激活函數(如relu)增加非線性;
23、池化層則對卷積層的輸出進行下采樣,減少數據的維度和計算量;
24、全連接層將卷積和池化后的特征映射到最終的分類或回歸任務;
25、卷積操作公式如下:
26、
27、其中,是第k層在位置(i,j)的輸出,是卷積核的權重,是第k-1層的輸入,bk是偏置項,f是激活函數;
28、長短時記憶網絡(lstm)公式如下:
29、ft=σ(wf·[ht-1,xt]+bf)(遺忘門);
30、it=σ(wi·[ht-1,xt]+bf)(輸入門);
31、
32、ot=σ(wo·[ht-1,xt]+bo)(輸出門);
33、ht=ot·tanh(ct)(隱藏狀態);
34、其中,ft、it、ot分別是遺忘門、輸入門和輸出門的輸出;是候選細胞狀態,ct是細胞狀態,ht是隱藏狀態,σ是sigmoid激活函數,w和b是權重和偏置項。
35、進一步,還包括用于實驗室人員行為識別的穿戴設備,所述穿戴設備包括加速度計、陀螺儀、磁力計、溫度傳感器或心率監測器中的一種或多種。
36、進一步,所述實時監測實驗室內的環境參數包括溫度、濕度、光照強度、空氣質量、噪音水平中的一種或多種;
37、所述環境參數通過物聯網傳感器網絡進行采集,并通過物聯網網關進行統一管理和數據傳輸。
38、進一步,所述邊緣計算初步處理包括以下步驟:
39、通過設定閾值對原始數據進行初步篩選,采用滑動窗口濾波法以去除噪聲數據或無效數據;
40、滑動窗口濾波法公式為:
41、
42、其中,xi為原始數據序列中的第i個數據點;w為滑動窗口的大小,yt為經過濾波后的第t個數據點。當yt超出預設的有效數據范圍[l,u]時,則認為該數據點為噪聲或無效數據,予以剔除;
43、采用基于統計的異常檢測z-score方法,以識別數據中的異常值;
44、z-score的計算公式為:
45、
46、其中,xi為數據點,μ為數據集的均值;σ為數據集的標準差;
47、若zi大于預設的閾值zthresh,則判定xi為異常值;
48、對過濾后的數據進行初步統計和分析,計算人員移動速度以及停留時間;
49、人員移動速度v計算公式如下:
50、
51、其中,(x1,y1)和(x1,y1)分別為人員在時間t1和時間t2的坐標位置。
52、進一步,所述緊急疏散路徑規劃算法考慮實驗室布局、人員位置、障礙物分布以及環境參數,利用圖論算法或啟發式搜索算法生成最優逃生路線,并通過實驗室內的顯示屏、穿戴設備或移動應用向實驗室人員提供逃生指引。
53、進一步,所述所述基于大數據分析的實驗室運營報告包括人員流動分析、環境參數變化趨勢、安全事件統計或資源利用率評估。
54、進一步,所述3d可視化技術采用webgl、unity3d或虛擬現實(vr)技術,用于管理人員能夠直觀地查看實驗室人員分布、環境狀態以及預警信息。
55、并且,本發明提供的基于物聯網實驗室的人員動態定位與監控方法,與現有技術相比,至少具有以下有益效果:
56、通過集成高精度定位技術(如uwb、rfid等)與深度學習算法,本方案實現了對實驗室人員的實時追蹤定位與行為識別。這不僅提高了實驗室人員管理的精確性和效率,還有助于及時發現并應對潛在的安全隱患。高精度定位技術確保了人員位置的準確性和實時性,而深度學習算法則能夠智能化地分析人員行為模式,為實驗室的安全管理提供了有力的技術支持。
57、本方案通過物聯網傳感器網絡實時監測實驗室內的環境參數,如溫度、濕度、光照強度、空氣質量和噪音水平等,并通過邊緣計算進行初步處理,有效減輕了云端服務器的處理負擔。同時,利用大數據分析技術對環境參數進行深入挖掘和分析,能夠及時發現環境參數的異常變化,并觸發預警信號,確保實驗室的安全和正常運行。這種實時監測與預警機制為實驗室管理人員提供了及時、準確的信息支持,有助于他們做出科學、合理的管理決策。
58、在緊急情況下,本方案能夠基于實驗室布局、人員位置、障礙物分布以及環境參數,利用圖論算法或啟發式搜索算法生成最優逃生路線,并通過多種渠道(如顯示屏、穿戴設備、移動應用等)向實驗室人員提供逃生指引。這不僅提高了實驗室人員在緊急情況下的自救能力,還確保了他們的生命安全。此外,通過不斷優化緊急疏散路徑規劃算法,本方案還能夠適應不同實驗室環境和人員分布的變化,為實驗室的安全管理提供了更加全面、可靠的支持。
- 還沒有人留言評論。精彩留言會獲得點贊!