視覺傳感器最佳焦面控制方法、裝置、環控系統及介質與流程
本發明涉及半導體檢測設備,尤其涉及一種視覺傳感器最佳焦面控制方法、裝置、環控系統及介質。
背景技術:
1、視覺傳感器是指利用光學元件和成像裝置獲取外部環境圖像信息的儀器,通常用圖像分辨率來描述視覺傳感器的性能,視覺傳感器的精度不僅與分辨率有關,而且同被測物體的檢測距離相關,被測物體距離越遠,其絕對的位置精度越差。
2、傳統的視覺傳感器最佳焦面控制技術,也稱自動對焦技術,主要基于固定的焦面距離搭配測距傳感器和運動臺,控制待觀測目標和視覺傳感器的距離保持在預先設計的工作距離。顯然,該方法的不足是沒有考慮環境變化引起的不同材料熱膨脹和光線折射率導致的視覺傳感器焦距和像差變化,進而會導致最佳成像位置偏移。針對這一不足,通常的應對方式包括從應用層面接受或容忍該變化范圍,和定期重新標定。然而,上述兩種方法均存在相應局限性,前者從應用層面接受或容忍該變化范圍,將使得應用場景限制相對低倍率的成像條件下,同時無法保證穩定的成像質量;后者采用定期重新標定的方式,需要考慮標定周期帶來的影響,對于長期低頻的重新標定,通常是可以接受的,但同時對于環境變化的控制提出了很高的要求,而對于短期高頻的重新標定,在高速應用場景下,通常被認為是不能接受的。
技術實現思路
1、本發明提供了一種視覺傳感器最佳焦面控制方法、裝置、環控系統及介質,以解決目前對視覺傳感器最佳焦面控制存在相應局限性,無法保證穩定的成像質量,且無法基于環境變化完成標定的問題。
2、根據本發明的一方面,提供了一種所述視覺傳感器最佳焦面控制方法應用于環控系統,所述環控系統中裝配有視覺傳感器,所述視覺傳感器最佳焦面控制方法包括:
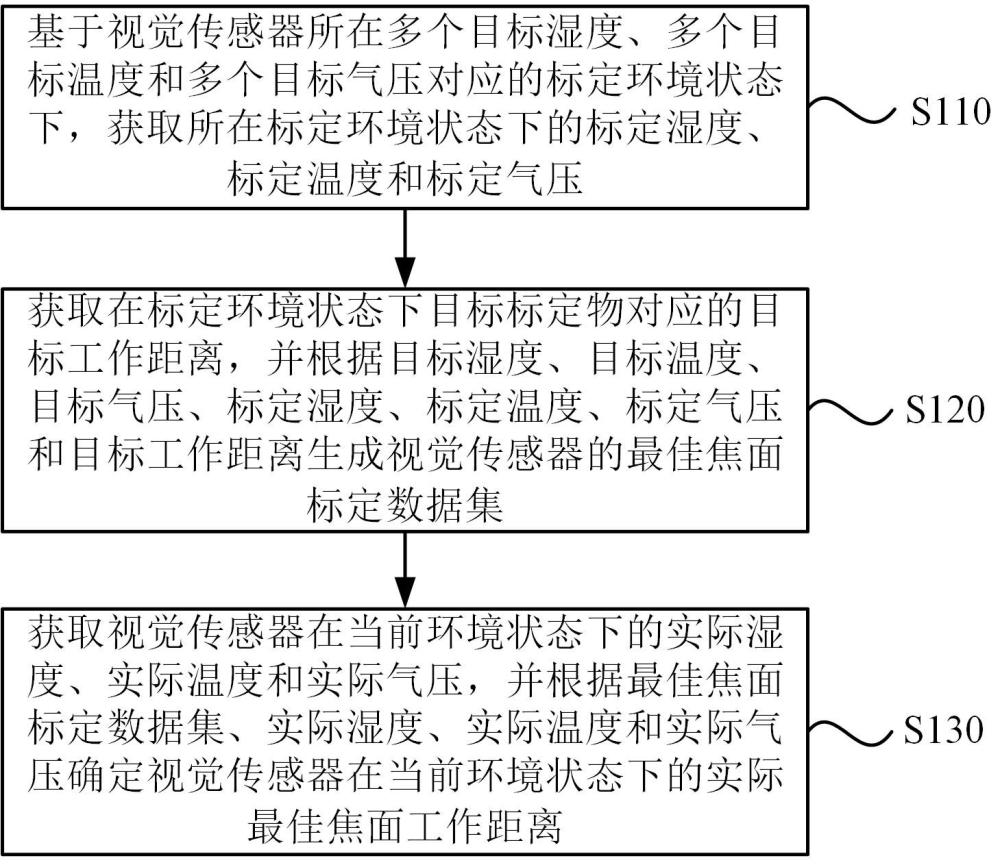
3、基于所述視覺傳感器所在多個目標濕度、多個目標溫度和多個目標氣壓對應的標定環境狀態下,獲取所在所述標定環境狀態下的標定濕度、標定溫度和標定氣壓;
4、獲取在所述標定環境狀態下目標標定物對應的目標工作距離,并根據所述目標濕度、所述目標溫度、所述目標氣壓、所述標定濕度、所述標定溫度、所述標定氣壓和所述目標工作距離生成所述視覺傳感器的最佳焦面標定數據集;
5、獲取所述視覺傳感器在當前環境狀態下的實際濕度、實際溫度和實際氣壓,并根據所述最佳焦面標定數據集、所述實際濕度、所述實際溫度和所述實際氣壓確定所述視覺傳感器在所述當前環境狀態下的實際最佳焦面工作距離。
6、可選的,所述視覺傳感器最佳焦面控制方法還包括:
7、獲取所述視覺傳感器所在初始環境狀態下的初始濕度、初始溫度和初始氣壓,并基于所述初始濕度、所述初始溫度和所述初始氣壓確定多個目標濕度、多個目標溫度和多個目標氣壓。
8、可選的,所述環控系統中裝配有溫度傳感器、濕度傳感器和氣壓傳感器;
9、基于所述視覺傳感器所在多個目標濕度、多個目標溫度和多個目標氣壓對應的標定環境狀態下,獲取所在所述標定環境狀態下的標定濕度、標定溫度和標定氣壓,包括:
10、基于依次選取所述目標濕度、所述目標溫度和所述目標氣壓確定的對應的所述視覺傳感器所在的標定環境狀態,獲取所在所述標定環境狀態下所述濕度傳感器測得的標定濕度、所述溫度傳感器測得的標定溫度以及氣壓傳感器測得的標定氣壓。
11、可選的,獲取在所述標定環境狀態下目標標定物對應的目標工作距離,包括:
12、獲取在所述標定環境狀態下使用z向運動軸控制目標標定物在z向運動的初始工作距離,并根據所述初始工作距離確定在所述標定環境狀態下所述目標標定物對應的目標工作距離。
13、可選的,根據所述初始工作距離確定在所述標定環境狀態下所述目標標定物對應的目標工作距離,包括:
14、基于所述初始工作距離使用所述視覺傳感器采集對應的位置圖像,并根據所述位置圖像確定與其對應的圖像清晰度;
15、根據所述圖像清晰度和所述初始工作距離確定在所述標定環境狀態下所述目標標定物對應的目標工作距離。
16、可選的,根據所述最佳焦面標定數據集、所述實際濕度、所述實際溫度和所述實際氣壓確定所述視覺傳感器在所述當前環境狀態下的實際工作距離,包括:
17、根據所述最佳焦面標定數據集、所述實際濕度、所述實際溫度和所述實際氣壓進行查表插值,得到所述視覺傳感器在所述當前環境狀態下的實際最佳焦面工作距離。
18、根據本發明的另一方面,提供了一種視覺傳感器最佳焦面控制裝置,所述視覺傳感器最佳焦面控制裝置應用于環控系統,所述環控系統中裝配有視覺傳感器,所述視覺傳感器最佳焦面控制裝置包括:
19、參數獲取模塊,用于執行基于所述視覺傳感器所在多個目標濕度、多個目標溫度和多個目標氣壓對應的標定環境狀態下,獲取所在所述標定環境狀態下的標定濕度、標定溫度和標定氣壓;
20、標定數據集生成模塊,用于執行獲取在所述標定環境狀態下目標標定物對應的目標工作距離,并根據所述目標濕度、所述目標溫度、所述目標氣壓、所述標定濕度、所述標定溫度、所述標定氣壓和所述目標工作距離生成所述視覺傳感器的最佳焦面標定數據集;
21、視覺傳感器最佳焦面控制模塊,用于執行獲取所述視覺傳感器在當前環境狀態下的實際濕度、實際溫度和實際氣壓,并根據所述最佳焦面標定數據集、所述實際濕度、所述實際溫度和所述實際氣壓確定所述視覺傳感器在所述當前環境狀態下的實際最佳焦面工作距離。
22、根據本發明的另一方面,提供了一種環控系統,所述環控系統包括視覺傳感器;
23、所述環控系統還包括:
24、至少一個處理器;以及,
25、與所述至少一個處理器通信連接的存儲器;其中,
26、所述存儲器存儲有可被所述至少一個處理器執行的計算機程序,所述計算機程序被所述至少一個處理器執行,以使所述至少一個處理器能夠執行本發明任一實施例所述的視覺傳感器最佳焦面控制方法。
27、可選的,所述環控系統還包括多個溫度傳感器、多個濕度傳感器、多個氣壓傳感器和測距傳感器。
28、根據本發明的另一方面,提供了一種計算機可讀存儲介質,所述計算機可讀存儲介質存儲有計算機指令,所述計算機指令用于使處理器執行時實現本發明任一實施例所述的視覺傳感器最佳焦面控制方法。
29、本發明實施例的技術方案,所述視覺傳感器最佳焦面控制方法應用于環控系統,所述環控系統中裝配有視覺傳感器,基于所述視覺傳感器所在多個目標濕度、多個目標溫度和多個目標氣壓對應的標定環境狀態下,獲取所在所述標定環境狀態下的標定濕度、標定溫度和標定氣壓,獲取在所述標定環境狀態下目標標定物對應的目標工作距離,并根據所述目標濕度、所述目標溫度、所述目標氣壓、所述標定濕度、所述標定溫度、所述標定氣壓和所述目標工作距離生成所述視覺傳感器的最佳焦面標定數據集,實現一次標定,而在后續視覺傳感器工作環境變化范圍內無需重復標定,且不依賴嚴格的環境條件;進一步,獲取所述視覺傳感器在當前環境狀態下的實際濕度、實際溫度和實際氣壓,并根據所述最佳焦面標定數據集、所述實際濕度、所述實際溫度和所述實際氣壓確定所述視覺傳感器在所述當前環境狀態下的實際最佳焦面工作距離,解決高倍物鏡淺景深導致的工作距離難以穩定控制問題,實現高速實時最佳焦面調整,保持運動過程中成像質量的一致性和穩定性。
30、應當理解,本部分所描述的內容并非旨在標識本發明的實施例的關鍵或重要特征,也不用于限制本發明的范圍。本發明的其它特征將通過以下的說明書而變得容易理解。
- 還沒有人留言評論。精彩留言會獲得點贊!